También podría gustarte
- Ejes de Transmisión (REPORTE)Documento6 páginasEjes de Transmisión (REPORTE)Luis MgAún no hay calificaciones
- Diseño de EjesDocumento31 páginasDiseño de EjesManuel O Lopez AAún no hay calificaciones
- Dem01 - Santamaria Vela Alan Antonio Parte 2, Capitulo 12Documento55 páginasDem01 - Santamaria Vela Alan Antonio Parte 2, Capitulo 12Alan Antonio33% (3)
- Resumen EjesDocumento5 páginasResumen EjesIlseSarahiMartinezAún no hay calificaciones
- Clase 8 Mecanismo Engranajes 3Documento55 páginasClase 8 Mecanismo Engranajes 3pipe spAún no hay calificaciones
- Clase 7 Mecanismo Engranajes 2Documento30 páginasClase 7 Mecanismo Engranajes 2pipe spAún no hay calificaciones
- Ejemplo N°1 EjesDocumento37 páginasEjemplo N°1 EjesMaria Belen Ocampo FloresAún no hay calificaciones
- Presentacion Diseño EjesDocumento78 páginasPresentacion Diseño EjesJaneth Cossio Chavez100% (1)
- Diseno de EjesDocumento31 páginasDiseno de EjesJose Luis VillarrealAún no hay calificaciones
- Diseño de EjesDocumento6 páginasDiseño de Ejesellechu100% (3)
- Marcos Isostaticos, Diagramas Axial, Cortante, FlexionanteDocumento15 páginasMarcos Isostaticos, Diagramas Axial, Cortante, Flexionantemjaravalenzuela917975% (4)
- Foro Tematico N°1Documento9 páginasForo Tematico N°1xd S:Aún no hay calificaciones
- Unidad 5 de Diseño Mecanico ImprimirDocumento6 páginasUnidad 5 de Diseño Mecanico ImprimirVelázquez MirandaAún no hay calificaciones
- Torsion UisDocumento19 páginasTorsion UisMiguelFernández0% (1)
- Resistencia de Materiales - Vigas y Flechas Por Resistencia - 2Documento18 páginasResistencia de Materiales - Vigas y Flechas Por Resistencia - 2Jhon Jairo Ballen DazaAún no hay calificaciones
- Cbest20 Iam02a 11049Documento9 páginasCbest20 Iam02a 11049sebastianaguilarmoreno.samAún no hay calificaciones
- Diseño de Ejes para El EsfuerzoDocumento5 páginasDiseño de Ejes para El EsfuerzoyelysAún no hay calificaciones
- 15.3 Parte ChechiDocumento9 páginas15.3 Parte ChechiCeci LeonAún no hay calificaciones
- Tema 3. Esfuerzo Cortante Por Torsión. (Clase) .Documento33 páginasTema 3. Esfuerzo Cortante Por Torsión. (Clase) .Daniel CastilloAún no hay calificaciones
- EjesDocumento13 páginasEjesJunior José Saavedra HolguinAún no hay calificaciones
- Trabajo de Fuerzas EstructuralesDocumento22 páginasTrabajo de Fuerzas EstructuralesDavid TorresAún no hay calificaciones
- Diseño de EjesDocumento20 páginasDiseño de EjesjoseAún no hay calificaciones
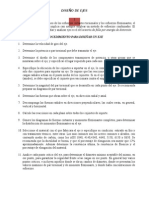
- Procedimientos para Diseño de EjesDocumento23 páginasProcedimientos para Diseño de Ejesyair100% (2)
- Presentacion de TorsionDocumento16 páginasPresentacion de TorsionJuan Carlos PujolsAún no hay calificaciones
- Balanceo de MotoresDocumento60 páginasBalanceo de MotoresNorberto BritosAún no hay calificaciones
- Diseo de Ejes PDFDocumento11 páginasDiseo de Ejes PDFJuan Diego Bohrquez100% (1)
- Diseño de EjesDocumento54 páginasDiseño de EjesDavid Ferrusca Martinez50% (2)
- El Cálculo de Los Esfuerzos de CompresiónDocumento21 páginasEl Cálculo de Los Esfuerzos de CompresiónDisman D'smAún no hay calificaciones
- 12 VigasDocumento6 páginas12 VigasGuillermo Socualaya RivasAún no hay calificaciones
- Torsion en Barras de Secciones CircularesDocumento7 páginasTorsion en Barras de Secciones CircularesCarmenPalaciosLópez100% (3)
- Diseño de EjesDocumento48 páginasDiseño de EjesRaul Cruz100% (1)
- Diseños de Ejes PDFDocumento11 páginasDiseños de Ejes PDFMikel1020100% (1)
- Diseño de EjesDocumento11 páginasDiseño de EjesJoel ChambillaAún no hay calificaciones
- Diseño de Ejes Con ChaveterosDocumento5 páginasDiseño de Ejes Con ChaveterosErick ManosalvasAún no hay calificaciones
- TORSIÓN - TrabajoDocumento6 páginasTORSIÓN - TrabajoRichard David Chanta MontalvoAún no hay calificaciones
- ENGRANESDocumento14 páginasENGRANESVicto_RabagoAún no hay calificaciones
- Movimiento Plano Restringido en Formato ApaDocumento13 páginasMovimiento Plano Restringido en Formato ApaCarlomagnoBautistoOrtizAún no hay calificaciones
- Sesión 13Documento17 páginasSesión 13J Griselda Mallqui QuispeAún no hay calificaciones
- Diseno Bajo Carga EstaticaDocumento5 páginasDiseno Bajo Carga Estaticaedson apazaAún no hay calificaciones
- Balanceo de MotoresDocumento60 páginasBalanceo de Motoresssws6Aún no hay calificaciones
- Clase8 Torsion 2Documento15 páginasClase8 Torsion 2rasstecoAún no hay calificaciones
- Mecánica de Materiales Unidad 2Documento8 páginasMecánica de Materiales Unidad 2Farid Huaman CochachinAún no hay calificaciones
- Frenos y EmbraguesDocumento7 páginasFrenos y EmbraguesManuel Mora Jr.Aún no hay calificaciones
- Diseño de Maquinas Capítulo 7 ShigleyDocumento2 páginasDiseño de Maquinas Capítulo 7 ShigleyJavier Aguja MaulhardtAún no hay calificaciones
- Fuerzas en AradosDocumento9 páginasFuerzas en AradosIsai CabreraAún no hay calificaciones
- Monografia PaquitaDocumento22 páginasMonografia PaquitaMiltonJhonCotradoAceroAún no hay calificaciones
- UF1253 - Diagnóstico de deformaciones estructuralesDe EverandUF1253 - Diagnóstico de deformaciones estructuralesAún no hay calificaciones
- Guía para el análisis y solución de problemas de resistencia de materialesDe EverandGuía para el análisis y solución de problemas de resistencia de materialesAún no hay calificaciones
- Principios de transferencia de cantidad de movimientoDe EverandPrincipios de transferencia de cantidad de movimientoAún no hay calificaciones
- Ejercicios de Integrales de Línea, Superficie y VolumenDe EverandEjercicios de Integrales de Línea, Superficie y VolumenCalificación: 4 de 5 estrellas4/5 (2)
- Diseño Práctico De Cimentaciones Sujetas a Vibración Producida Por MaquinariaDe EverandDiseño Práctico De Cimentaciones Sujetas a Vibración Producida Por MaquinariaAún no hay calificaciones
- Mantenimiento del sistema de arranque del motor del vehículo. TMVG0209De EverandMantenimiento del sistema de arranque del motor del vehículo. TMVG0209Calificación: 1 de 5 estrellas1/5 (2)
- Momentos de velocidad: Capturando la dinámica: conocimientos sobre la visión por computadoraDe EverandMomentos de velocidad: Capturando la dinámica: conocimientos sobre la visión por computadoraAún no hay calificaciones
- Laboratorio Analisis HidraulicoDocumento23 páginasLaboratorio Analisis HidraulicoRicardoMoran0% (1)
- Descripcion General Del Proceso MetalurgicoDocumento10 páginasDescripcion General Del Proceso MetalurgicoRicardoMoranAún no hay calificaciones
- Presión Marginal de La BombaDocumento9 páginasPresión Marginal de La BombaRicardoMoranAún no hay calificaciones
- Informe N°07 de Control ElectronicoDocumento10 páginasInforme N°07 de Control ElectronicoRicardoMoranAún no hay calificaciones
- Informe N°07 de Control ElectronicoDocumento10 páginasInforme N°07 de Control ElectronicoRicardoMoranAún no hay calificaciones
- Diferencial EstandarDocumento12 páginasDiferencial EstandarRicardoMoranAún no hay calificaciones
- Laboratorio 07 PDFDocumento19 páginasLaboratorio 07 PDFRicardoMoranAún no hay calificaciones
- Carretila LPGAS GRENDIA EX MitsubishiDocumento9 páginasCarretila LPGAS GRENDIA EX MitsubishiAngel AjaAún no hay calificaciones
- Reporte de EjercicioDocumento8 páginasReporte de EjercicioJuan Manuel Martinez DominguezAún no hay calificaciones
- PitotDocumento2 páginasPitotDavid Efrén PapAún no hay calificaciones
- Rev - Jair Punch List Cerro Verde 23 MayDocumento2 páginasRev - Jair Punch List Cerro Verde 23 MayAli Halim BAún no hay calificaciones
- M.R.U - Informe de LaboratorioDocumento5 páginasM.R.U - Informe de Laboratoriomichael9845Aún no hay calificaciones
- Actividad Entregable #1Documento7 páginasActividad Entregable #1Edy Corahua HuacchaAún no hay calificaciones
- 6.2.5 Procedimiento - PolikenDocumento6 páginas6.2.5 Procedimiento - PolikenLiliana Lupe Flores PomaAún no hay calificaciones
- CamiloChiappe TaludesDocumento5 páginasCamiloChiappe TaludesCamilo Andres Chiappe MontañezAún no hay calificaciones
- Mathcad - Cajon2.5x2.5 h5Documento22 páginasMathcad - Cajon2.5x2.5 h5Juan RestrepoAún no hay calificaciones
- Leccion2.Refractarios - Propiedades MECANICASDocumento35 páginasLeccion2.Refractarios - Propiedades MECANICASIvan Santa CruzAún no hay calificaciones
- Daewoo Nubira 1999Documento3 páginasDaewoo Nubira 1999Williams Medina100% (3)
- Clase - 270320Documento30 páginasClase - 270320AlejandroAún no hay calificaciones
- Guia de Practica N°1 Bomba 1 Curva CaracteDocumento7 páginasGuia de Practica N°1 Bomba 1 Curva CaracteDIEGO CAMILO GUTIERREZ RIVEROSAún no hay calificaciones
- Lab 6Documento13 páginasLab 6Ronaldo Sebastian Zeballos FernandezAún no hay calificaciones
- Ejercicios de DinámicaDocumento3 páginasEjercicios de DinámicaFabián VargasAún no hay calificaciones
- Autoevaluación 02 - CALCULO APLICADO A LA FISICA 1 (8595)Documento6 páginasAutoevaluación 02 - CALCULO APLICADO A LA FISICA 1 (8595)R De La CruzAún no hay calificaciones
- Física 1. HYS. MónacoDocumento14 páginasFísica 1. HYS. MónacoFederico GuitianAún no hay calificaciones
- Absorción Clase 2Documento13 páginasAbsorción Clase 2Cristina LopezAún no hay calificaciones
- Capitulo 2 Analisis EstructuralDocumento18 páginasCapitulo 2 Analisis EstructuralMarlonAún no hay calificaciones
- MARCOPERUANOSACDocumento11 páginasMARCOPERUANOSACNelson Valentin Castillo AranaAún no hay calificaciones
- Ejercicios de Cinematica (II) Miguel ODocumento2 páginasEjercicios de Cinematica (II) Miguel OarlencoAún no hay calificaciones
- Presentación EchometerDocumento67 páginasPresentación EchometerManoel Hermínio Vieira NetoAún no hay calificaciones
- Desarme y Reglaje Carburador SOLEX Citroen 2CVDocumento5 páginasDesarme y Reglaje Carburador SOLEX Citroen 2CVSebastian Machuca100% (1)
- Informe Resistencia MaderasDocumento15 páginasInforme Resistencia MaderasKelber ZelayaAún no hay calificaciones
- Presentacion Conjunto de EmbragueDocumento83 páginasPresentacion Conjunto de EmbragueYanh Nicolas Castillo DiazAún no hay calificaciones
- Como Comprobar BimasaDocumento12 páginasComo Comprobar BimasaMikel EsponjaAún no hay calificaciones
- Tarea #2Documento2 páginasTarea #2limbert ballejos machacaAún no hay calificaciones
- 2021 Clase Ruedas Poleas y EngranajesDocumento4 páginas2021 Clase Ruedas Poleas y EngranajesPEPPA PIG REISSAún no hay calificaciones
- SpanishDocumento54 páginasSpanishSergio ReyesAún no hay calificaciones
- Pre Informe de Bomba CentrifugaDocumento8 páginasPre Informe de Bomba CentrifugaMaggie EcliptwimonAún no hay calificaciones