UNIVERSIDAD TECNOLÓGICA DEL PERÚ
WALL-E
Facultad: Ingenierías
Profesión: Ingeniería Industrial
Alumno: Mamani Deza Jhon Antony
Curso: Dibujo Cad
Sección: 5338
Año: 2019
Docente: Chacca Cuti Edgar
Arequipa, 20 de Julio de 2019
1
� INDICE
1. Resumen …………………………………………………………............................3
1.1 Descripción del problema ……………………………………………………..3
1.2 Objetivos………………………………………………………………………..3
[Link]ón……………………………………………………………………………..4
[Link] del trabajo………………………………………………………………………5
3.1 Antecedentes Generales……………………………………………………….5
3.1.1 Presentación de objetivos, requerimientos o expectativas ……….5
3.1.2 Métodos y herramientas utilizados ……………………………………5
3.2 Antecedentes y/o Influencias Técnico ……………………………………….6
3.3 Marco Teórico …………………………………………………………………7
3.3.1 Estudio Histórico ……………………………………………………… 7
4. Conclusiones …………………………………………………………………………9
5. Bibliografía …………………………………………………………………………….10
6. Anexos…………………………………………………………………………………10
2
�[Link]
1.1 DESCRIPCION DEL PROYECTO
Tras muchas vueltas y divagar por multitud de ideas de diferentes estilos, decidí por
el robot protagonista que concede su nombre a la película WALL E (Disney Pixar).
La elección de este proyecto nace de varios hechos. Como era un trabajo
completamente libre comencé a pensar en qué me gustaría, lo primero que me vino
a la mente fueron las películas Disney y producciones de Pixar, que siempre me
han sorprendido tanto. De entre mis películas favoritas escogí a Wall E, porque creo
que favorecería mí punto fuerte, la línea y la limpieza. Y como punto final, y no
menos importante, el tema de la película, que ya se refleja en nuestro planeta, el
exceso de basura y a su vez, el intento por hallar una solución a esto.
Así nace Wall E una maquina compactadora de basura que tras muchos años es la
única superviviente de su especie, que incluso desarrollará emociones propias de
los humanos.
1.2 OBJETIVOS
1.2.1 Objetivo General
- Crear un Wall-e usando el software de Autodesk Inventor
1.2.2 Objetivos Específicos
-Usar normativas de dibujo técnico para la creación de planos
-Realizar el ensamble y animación del conjunto y el despiece.
3
�2. INTRODUCCION
El tema a trabajar a través del programa Autodesk Inventor, en este caso el juguete
escogido fue el robot Wall·e de Pixar Animation Studios no siendo el único objetivo
la modelación del mismo, dando así una gran importancia a la selección del juguete,
el desarrollo de planos, despiece y ensambles, el acabo de las imágenes
fotorrealistas o incluso el desarrollo de una propuesta de un nuevo diseño y función.
El trabajo se desenvolvió de la siguiente manera; primero fue la selección del objeto
a estudiar (el robot Wall·e), luego vino el estudio físico para poder empezar la
modelación en Autodesk Inventor y las mediciones de nuestro objeto para poder
diseñarlo con la mayor rigurosidad y precisión. Tras la modelación en 3D, se ha
concretado así las características de nuestro producto. A continuación, se realizó el
estudio de las distintas maneras de presentación del juguete (explosionado,
muestras en 2D con las vistas necesarias, cotas, detalles y cortes). Tras conocer a
detalle el producto procedí a pensar en cómo lo podría mejorar,
Como la capacidad de visionado espacial y el desarrollo del conocimiento de los
métodos técnico productivos asociados a la transferencia de un objeto real a uno
virtual. Por supuesto, las distintas herramientas, funciones, aplicaciones y
posibilidades que ofrece el programa ya citado Autodesk Inventor y el
desenvolvimiento en el mismo, así como los conceptos y la terminología que
conlleva.
4
�3. CUERPO DEL TRABAJO
3.1 ANTECEDENTES GENERALES
3.1.1 Presentación de objetivos, requerimientos o expectativas
- Realizar las piezas del Wall-e.
- Contar con un buen pc para poder realizarlo sin problemas y el programa Autodesk
Inventor actualizado para poder desarrollarlo mejor.
3.1.2 Métodos y herramientas utilizados
- En primer lugar, se utilizó fuentes confiables para desarrollar nuestro proyecto tales
como el libro de (AURIA APILLUELO, 2008) sobre dibujo industrial. Para poder
seleccionar uno de sus planos.
- En segundo lugar, se utilizó la información brindada por el docente a través de la
plataforma virtual Canvas que contenía términos en el área de dibujo y también para
el diseño de las piezas.
- En tercer lugar, se utilizó el software Autodesk inventor.
5
�3.2 ANTECEDENTES Y/O INFLUENCIAS TÉCNICO
Al ser una película de Disney, que por lo tanto es reconocida en todo el mundo, por
Internet descubrí que había varios cientos de Wall E : de cartón, metal, papel... Por
esto he tenido muchas influencias.
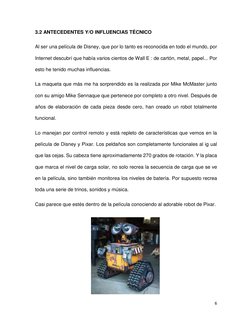
La maqueta que más me ha sorprendido es la realizada por Mike McMaster junto
con su amigo Mike Sennaque que pertenece por completo a otro nivel. Después de
años de elaboración de cada pieza desde cero, han creado un robot totalmente
funcional.
Lo manejan por control remoto y está repleto de características que vemos en la
película de Disney y Pixar. Los peldaños son completamente funcionales al ig ual
que las cejas. Su cabeza tiene aproximadamente 270 grados de rotación. Y la placa
que marca el nivel de carga solar, no solo recrea la secuencia de carga que se ve
en la película, sino también monitorea los niveles de batería. Por supuesto recrea
toda una serie de trinos, sonidos y música.
Casi parece que estés dentro de la película conociendo al adorable robot de Pixar.
6
�3.3 MARCO TEORICO
3.3.1 Estudio Histórico
Es una película de animación que une la ciencia ficción y la comedia estrenada en
2008. Fue dirigida por Andrew Stanton, quien anteriormente ya había trabajado con
la productora Walt Dsiney Pic tures y Pixar Animation Studios en la película
“Buscando a Nemo”. En ella se utilizó por primera vez para la segunda compañía ,
escenas reales.
Las imágenes fueron obtenidas mediante la filmación directa de actores o elementos
reales, a diferencia de la animación, donde únicamente se utilizan dibujos, gráficos
informáticos. Así se convierte en la producción más compleja de Pixar. Teniendo en
cuenta que las películas de Pixar por lo general llegaban a los 75000 guiones
gráficos, y Wall e necesitó 125000.
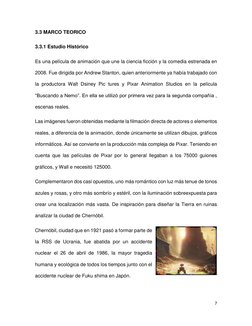
Complementaron dos casi opuestos, uno más romántico con luz más tenue de tonos
azules y rosas, y otro más sombrío y estéril, con la iluminación sobreexpuesta para
crear una localización más vasta. De inspiración para diseñar la Tierra en ruinas
analizar la ciudad de Chernóbil.
Chernóbil, ciudad que en 1921 pasó a formar parte de
la RSS de Ucrania, fue abatida por un accidente
nuclear el 26 de abril de 1986, la mayor tragedia
humana y ecológica de todos los tiempos junto con el
accidente nuclear de Fuku shima en Japón.
7
�El reactor número 4 de la planta nuclear explotó. Desde entonces, las radiaciones
han envenenado todo el territorio y a millones de personas dejando secuelas físicas
graves.
Después del accidente, se inició un proceso masivo, contención y mitigación para
aislar un área de 30 km de radio alrededor de la central que h oy
en día sigue vigente y el acceso prohibido (salvo algunos investigadores y
periodistas). Aunque, sorprendentemente ha crecido vegetación, sigue siendo una
ciudad fantasma, que nos deja imágenes desoladoras.
Algunas imágenes Algunas imágenes al igual que en la película, podemos observar
montones de basura al igual que en la película, podemos observar montones de
basura y objetos que tuvieron que abandonar en el acto:y objetos que tuvieron que
abandonar en el acto:
El film tuvo una recepción muy positiva alcanzando valoraciones altísimas y siendo
nominada en diversas categorías de premios, principalmente como mejor película
animada.
8
�4. CONCLUSIONES
Debo destacar como antes ya mencioné al principio de la memoria lo positivo que
ha sido para mí ampliación del conocimiento en la materia como en Autodesk
Inventor realizar este trabajo, aunque debo de mencionar las dificultades que he
tenido; para empezar, él juegue es poco regular, no existen líneas totalmente rectas
ni curvas totalmente circulares por lo tanto partiendo de esa base las medidas
siempre van a tener un error. Como antes dije, las medidas han sido a veces tan
pequeñas que he tenido que suponerlas para poder seguir. He intentado ser lo más
fiel a la realizar y espero haber lo conseguido.
9
� BIBLIOGRAFIA
AURIA APILLUELO, J. M. (2008). Dibujo industrial. Conjuntos y despieces:
conjuntos y despieces. Madrid : thomson Editores Spain
Autodesk. (s.f.). [Link]. Obtenido de
[Link]
Ana Correa, (2012), Revisiones de aprendizaje. Obtenido de
[Link]
de-wall-e-la-descripcion-proyecto-wall-e/
Devora Madrid, (2014), Humanamente Tecnológico. Obtenido de
[Link]
[Link]?sequence=1
Juan Camarena, (2011) Diseño y Mecanismo. Obtenido de
[Link]
ANEXOS
Lista de planos:
-Plano 1 Explosión
-Plano 2 Vistas del proyecto
-Plano 3 Proyecto y sus partes
-Plano 4-20 Vistas de las piezas
Link de los videos en YouTube:
[Link]
k_Nf0f1izyBzlK1RQU0kC4Edx&index=1
10