0% encontró este documento útil (1 voto)
3K vistas23 páginasProyecto Final Wall-E
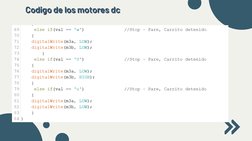
Este documento presenta un proyecto de un robot llamado Wall-E diseñado para facilitar la recolección de desechos de manera segura. El robot fue construido por 4 estudiantes y contiene componentes como motores, servos, y circuitos de control. El proyecto tiene como objetivos ayudar al medio ambiente y reducir riesgos para los operarios. El documento describe las etapas de compra de componentes, funciones del robot, implementación de código, y simulaciones. En conclusión, el robot automatiza tareas peligrosas, ofrece experi
Cargado por
jorgeDerechos de autor
© © All Rights Reserved
Nos tomamos en serio los derechos de los contenidos. Si sospechas que se trata de tu contenido, reclámalo aquí.
Formatos disponibles
Descarga como PDF, TXT o lee en línea desde Scribd
0% encontró este documento útil (1 voto)
3K vistas23 páginasProyecto Final Wall-E
Este documento presenta un proyecto de un robot llamado Wall-E diseñado para facilitar la recolección de desechos de manera segura. El robot fue construido por 4 estudiantes y contiene componentes como motores, servos, y circuitos de control. El proyecto tiene como objetivos ayudar al medio ambiente y reducir riesgos para los operarios. El documento describe las etapas de compra de componentes, funciones del robot, implementación de código, y simulaciones. En conclusión, el robot automatiza tareas peligrosas, ofrece experi
Cargado por
jorgeDerechos de autor
© © All Rights Reserved
Nos tomamos en serio los derechos de los contenidos. Si sospechas que se trata de tu contenido, reclámalo aquí.
Formatos disponibles
Descarga como PDF, TXT o lee en línea desde Scribd