100% encontró este documento útil (1 voto)
6K vistas4 páginasProyecto Robot Recolector de Basura
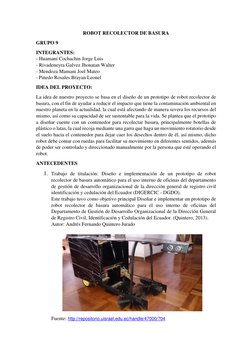
El documento describe un proyecto de diseño de un robot recolector de basura. El robot tendrá un contenedor y una garra rotatoria para recoger botellas de plástico y latas del suelo y depositarlas en el contenedor. Contará con ruedas para moverse en diferentes direcciones y será controlado manualmente. Se revisan cinco antecedentes de proyectos similares de robots recolectores de basura en playas diseñados para reducir la contaminación.
Cargado por
jwrivadeneyra00Derechos de autor
© © All Rights Reserved
Nos tomamos en serio los derechos de los contenidos. Si sospechas que se trata de tu contenido, reclámalo aquí.
Formatos disponibles
Descarga como PDF, TXT o lee en línea desde Scribd
100% encontró este documento útil (1 voto)
6K vistas4 páginasProyecto Robot Recolector de Basura
El documento describe un proyecto de diseño de un robot recolector de basura. El robot tendrá un contenedor y una garra rotatoria para recoger botellas de plástico y latas del suelo y depositarlas en el contenedor. Contará con ruedas para moverse en diferentes direcciones y será controlado manualmente. Se revisan cinco antecedentes de proyectos similares de robots recolectores de basura en playas diseñados para reducir la contaminación.
Cargado por
jwrivadeneyra00Derechos de autor
© © All Rights Reserved
Nos tomamos en serio los derechos de los contenidos. Si sospechas que se trata de tu contenido, reclámalo aquí.
Formatos disponibles
Descarga como PDF, TXT o lee en línea desde Scribd