También podría gustarte
- At - New Technical Features 2010 - w22 Inmovilizador-FaseIV-Fazit - SPADocumento21 páginasAt - New Technical Features 2010 - w22 Inmovilizador-FaseIV-Fazit - SPARoger Bassa Daunis100% (1)
- Seminario Multiplexado 3Documento46 páginasSeminario Multiplexado 3B Arturo GalindoAún no hay calificaciones
- Las Mejores 100 Obras de La Musica Clasica - Las 100 Grandes Obras de La Musica ClasicaDocumento9 páginasLas Mejores 100 Obras de La Musica Clasica - Las 100 Grandes Obras de La Musica ClasicaRafael Luque50% (2)
- Música A 432 Hz. para Descargar GratisDocumento6 páginasMúsica A 432 Hz. para Descargar GratisRafael LuqueAún no hay calificaciones
- Seminario SlidesDocumento46 páginasSeminario Slidesminombremio2100% (1)
- Mantenimiento de redes multiplexadas. TMVG0209De EverandMantenimiento de redes multiplexadas. TMVG0209Calificación: 5 de 5 estrellas5/5 (1)
- Lo Esencial de Los Sensores de Posición Del Cigüeñal Y Árbol de LevasDocumento19 páginasLo Esencial de Los Sensores de Posición Del Cigüeñal Y Árbol de LevasSergioPalmaVasquezAún no hay calificaciones
- EySer09 Prueba Del Sensor ECT, Chevrolet Spark P0115 P0116 P0117 P0118 P0119 - LUFFIDocumento1 páginaEySer09 Prueba Del Sensor ECT, Chevrolet Spark P0115 P0116 P0117 P0118 P0119 - LUFFIJorge Ruben Escudero100% (1)
- Hermanacion Ews 3 BMW BMW PDFDocumento10 páginasHermanacion Ews 3 BMW BMW PDFHyb CerrajeriaAún no hay calificaciones
- Sistemas InmovilizadoresDocumento4 páginasSistemas Inmovilizadoresjalvarez_385073Aún no hay calificaciones
- Sensores TPS - Parte 1 - Encendido ElectronicoDocumento7 páginasSensores TPS - Parte 1 - Encendido Electronicolucas100% (1)
- Funcionamiento y Diagnostico EVAPDocumento27 páginasFuncionamiento y Diagnostico EVAPIvoo oo100% (1)
- Osciloscopio AutomotrizDocumento35 páginasOsciloscopio Automotrizlennon r100% (1)
- AEC001Documento10 páginasAEC001aagreco73Aún no hay calificaciones
- Alarmas e Inmovilizadores PDFDocumento3 páginasAlarmas e Inmovilizadores PDFMatias ZavalaAún no hay calificaciones
- 2 Gestion Del Motor 3Documento109 páginas2 Gestion Del Motor 3Joel Isaac Perez CifuentesAún no hay calificaciones
- EEC03 Diagnóstico de Las Redes de Comunicación AutomotricesDocumento94 páginasEEC03 Diagnóstico de Las Redes de Comunicación AutomotricesEsteban MunaresAún no hay calificaciones
- Funciones Especiales Escaner VWDocumento10 páginasFunciones Especiales Escaner VWJorge Antonio GuillenAún no hay calificaciones
- Auto Tronic ADocumento11 páginasAuto Tronic AVictor Rodríguez PatAún no hay calificaciones
- Clase 10-IyDocumento62 páginasClase 10-IyMauricio SarangoAún no hay calificaciones
- Catalogo InterfaceDocumento9 páginasCatalogo InterfacemanuelmolinaccAún no hay calificaciones
- BobinasDocumento27 páginasBobinasFederico VasilchukAún no hay calificaciones
- Temario Programacion de Llaves Modulo 1 On LineDocumento2 páginasTemario Programacion de Llaves Modulo 1 On LineAdalberto Castro VerdugoAún no hay calificaciones
- Interface Elm327 para Conectar La PC Con El VehiculoDocumento8 páginasInterface Elm327 para Conectar La PC Con El Vehiculodeaquidemarg-1Aún no hay calificaciones
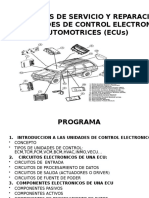
- Manual Del Curso Rep Ecu ChryslerDocumento14 páginasManual Del Curso Rep Ecu ChryslerJorge Fernando Alberto MamaniAún no hay calificaciones
- Cise ElectronicDocumento38 páginasCise ElectronicWalter Puca100% (2)
- Manual Sensor CKPDocumento11 páginasManual Sensor CKPDaniel Caro67% (3)
- 1 - Sistemas Electronicos de La EcuDocumento25 páginas1 - Sistemas Electronicos de La EcuElmer Ariel Aguilar Torrez100% (1)
- Sensores Su Funcion y Ubicación BlazerDocumento9 páginasSensores Su Funcion y Ubicación BlazerAdalberto SalcedoAún no hay calificaciones
- 1.0 Curso de Alarmas VWDocumento58 páginas1.0 Curso de Alarmas VWRoberto Torres100% (1)
- 2.1 Resistencia Calefactora Del Sensor de OxigenoDocumento6 páginas2.1 Resistencia Calefactora Del Sensor de OxigenoRonaldo MatiasAún no hay calificaciones
- CMP, Ego y EctDocumento11 páginasCMP, Ego y EctNegrow Salinas Nb Diego Salinas100% (1)
- MULTIPLEXADODocumento59 páginasMULTIPLEXADOJose Ledezma100% (1)
- Programacion Cuerpo de Aceleración y PedalDocumento4 páginasProgramacion Cuerpo de Aceleración y PedalJesús GutiérrezAún no hay calificaciones
- Sistemas de Alarmas e InmovilizadoresDocumento21 páginasSistemas de Alarmas e InmovilizadoresChoco Vladex100% (1)
- Ecus 2015Documento58 páginasEcus 2015Juan Carlos Perdomo100% (1)
- Alarmas e InmovilizadoresDocumento19 páginasAlarmas e InmovilizadoresSilva Erwin100% (1)
- Presentation Scanator Curso Programación OPELDocumento56 páginasPresentation Scanator Curso Programación OPELCromo CastellonAún no hay calificaciones
- Que Son Las ECUSDocumento4 páginasQue Son Las ECUSOscar SotoAún no hay calificaciones
- 2.1.2 CanDocumento45 páginas2.1.2 Cancr.barralesAún no hay calificaciones
- 8 Febrero Redes de Comunicación AutomotrizDocumento60 páginas8 Febrero Redes de Comunicación AutomotrizBRAYAN ANDRES NOVOA LLANGAAún no hay calificaciones
- Diagnostico OBDIIDocumento38 páginasDiagnostico OBDIIMauro GutierrezAún no hay calificaciones
- Clase 2 Pid SDocumento36 páginasClase 2 Pid SCarlos Alberto Ramirez LópezAún no hay calificaciones
- 2 Curso Can Bus y Tableros Digitales InternacionalDocumento2 páginas2 Curso Can Bus y Tableros Digitales InternacionalFreddy VillegasAún no hay calificaciones
- Presentación 1Documento35 páginasPresentación 1Kevin Diego100% (1)
- Pruebas de Banco BobinasDocumento12 páginasPruebas de Banco BobinasPablomst GomezAún no hay calificaciones
- PEUGEOTDocumento16 páginasPEUGEOTwilly ninaAún no hay calificaciones
- Aprenda A Diagnosticar Un Red Can y Que Metodos Debes de EmplearDocumento3 páginasAprenda A Diagnosticar Un Red Can y Que Metodos Debes de EmplearJaimer Yersiño Riveros ReyesAún no hay calificaciones
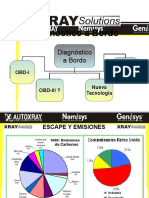
- 2005-12-17, Capacitacion Xray, Diagnostico A BordoDocumento37 páginas2005-12-17, Capacitacion Xray, Diagnostico A BordoIrving Andrade Chigo100% (1)
- Curso Inmovilizadores Parte 1Documento18 páginasCurso Inmovilizadores Parte 1bajarapunte100% (1)
- Cuerpos de Aceleracion y Pedales ElectronicosDocumento46 páginasCuerpos de Aceleracion y Pedales ElectronicosDENIS MARCELO UGEÑO GUILCAPI50% (2)
- Diagnosticar Un Red CANDocumento10 páginasDiagnosticar Un Red CANLopez Maciel100% (2)
- Tarea - 09 - Detallar Los Pines Del Conector DLC de 12 Pines y 16 PinesDocumento9 páginasTarea - 09 - Detallar Los Pines Del Conector DLC de 12 Pines y 16 PinesGilmar BerzosaAún no hay calificaciones
- Presentacion VAG-COM VAS y Scanator VAG PDFDocumento42 páginasPresentacion VAG-COM VAS y Scanator VAG PDFإطار كيسيAún no hay calificaciones
- 3 Nociones Básicas MultiplexadoDocumento37 páginas3 Nociones Básicas MultiplexadoJaime Mauricio González GuzmánAún no hay calificaciones
- Acceso Al Sistema InmoDocumento13 páginasAcceso Al Sistema InmoBili Javier Caceres100% (1)
- Escáner AutomotrizDocumento9 páginasEscáner AutomotrizDerio100% (1)
- Codificar Llave Vag ComDocumento3 páginasCodificar Llave Vag ComMariano Herrero SordoAún no hay calificaciones
- Curso Bus Can Protocolo Comunicaciones Ecu Unidad Control Canopen Trama Datos Obd Diagnostico Automovil PDFDocumento46 páginasCurso Bus Can Protocolo Comunicaciones Ecu Unidad Control Canopen Trama Datos Obd Diagnostico Automovil PDFramiroconvers100% (1)
- Presentación Electricidad 2Documento121 páginasPresentación Electricidad 2HARAM JAIR GUZMAN LOPEZAún no hay calificaciones
- Fundamentos Del CAN Bus.Documento65 páginasFundamentos Del CAN Bus.Juan vilchez sanchezAún no hay calificaciones
- Data Disp-cruze-DG307522-231116 PDFDocumento9 páginasData Disp-cruze-DG307522-231116 PDFRafael LuqueAún no hay calificaciones
- Cavenez y FavenpaDocumento1 páginaCavenez y FavenpaRafael LuqueAún no hay calificaciones
- Aditivo para GasolinaDocumento1 páginaAditivo para GasolinaRafael LuqueAún no hay calificaciones
- El Orgasmo Femenino, Ese Gran Desconocido - SexleccionesDocumento1 páginaEl Orgasmo Femenino, Ese Gran Desconocido - SexleccionesRafael LuqueAún no hay calificaciones
- Anaisis de Laboratorio-ExxonMobilDocumento3 páginasAnaisis de Laboratorio-ExxonMobilRafael LuqueAún no hay calificaciones
- Software Pack - Pro Edition 16.2Documento5 páginasSoftware Pack - Pro Edition 16.2Rafael LuqueAún no hay calificaciones
- 018 Aditivos Detergentes y DispersantesDocumento1 página018 Aditivos Detergentes y DispersantesRafael LuqueAún no hay calificaciones
- Las 100 Obras Instrumentales Mas Romanticas y Sentimentales de La Musica Clasica - Las 100 Grandes Obras de La Musica ClasicaDocumento9 páginasLas 100 Obras Instrumentales Mas Romanticas y Sentimentales de La Musica Clasica - Las 100 Grandes Obras de La Musica ClasicaRafael Luque100% (1)
- Teatro NegroDocumento6 páginasTeatro NegroSpa Termal CanningAún no hay calificaciones
- Medidas AntropometricasDocumento2 páginasMedidas AntropometricaspatataAún no hay calificaciones
- Quinta ClaseDocumento10 páginasQuinta ClaseOlivera KenyaAún no hay calificaciones
- Acuífero Valle Del GuadianaDocumento3 páginasAcuífero Valle Del GuadianaSamanta BarrazaAún no hay calificaciones
- Estado y SociedadDocumento24 páginasEstado y SociedadAndrews MenjivarAún no hay calificaciones
- Caracterización Línea BaseDocumento41 páginasCaracterización Línea Baseanon_11991575Aún no hay calificaciones
- Sílabo de Ecuaciones Diferenciales UNACHDocumento4 páginasSílabo de Ecuaciones Diferenciales UNACHRonal SotoAún no hay calificaciones
- Antorchas - Teórico de PerciaDocumento16 páginasAntorchas - Teórico de Perciayami rodriguezAún no hay calificaciones
- Ejemplos Practicas Previas A PPDocumento21 páginasEjemplos Practicas Previas A PPAnonymous t89cjYS1ZxAún no hay calificaciones
- 02 Termodinamica Metalurgica 2020Documento85 páginas02 Termodinamica Metalurgica 2020Alexander TRAún no hay calificaciones
- FC1. Depresores Centrales No Selectivos ENE2016Documento21 páginasFC1. Depresores Centrales No Selectivos ENE2016Veronica Ramos RojasAún no hay calificaciones
- Guia 2do Parcial 2020Documento118 páginasGuia 2do Parcial 2020ROSSY MARIEL PEREDO PARDOAún no hay calificaciones
- Economía - Clase 03 - Proceso EconomicoDocumento6 páginasEconomía - Clase 03 - Proceso EconomicoLunica NcAún no hay calificaciones
- Covenin 11-7-002Documento21 páginasCovenin 11-7-002Renzo del RioAún no hay calificaciones
- Ejercicio Practico - Peticion para Podar Un ArbolDocumento6 páginasEjercicio Practico - Peticion para Podar Un ArbolDennis CanizalesAún no hay calificaciones
- Sistemas de Ecuaciones Lineales SimultaneasDocumento13 páginasSistemas de Ecuaciones Lineales SimultaneasSofia Salet Reyes SotoAún no hay calificaciones
- Cuáles Son Las Ciencias Auxiliares de La HistoriaDocumento4 páginasCuáles Son Las Ciencias Auxiliares de La HistoriaMickey SantiagoAún no hay calificaciones
- N0026466 PDF EsDocumento22 páginasN0026466 PDF EsBlanca CortesAún no hay calificaciones
- 1° Liquidacion de GastosDocumento20 páginas1° Liquidacion de GastosRuben García GarcíaAún no hay calificaciones
- Plan de Trabajo-Consulta de NutriciónDocumento2 páginasPlan de Trabajo-Consulta de Nutriciónkarla.rayonAún no hay calificaciones
- Hoja Tecnica MT Con MTBDocumento12 páginasHoja Tecnica MT Con MTBCideAmeteBerengueliAún no hay calificaciones
- ProblemasCIGTema4 (Curso09 10)Documento5 páginasProblemasCIGTema4 (Curso09 10)Jhon Jose RamosAún no hay calificaciones
- Guia de ProcesamientoDocumento96 páginasGuia de Procesamiento962619857Aún no hay calificaciones
- Lab 1A Prueba de Corte Con Veleta de CampoDocumento5 páginasLab 1A Prueba de Corte Con Veleta de Campojavierpm1997100% (1)
- Planeación Clase Semana 6 CienciasDocumento2 páginasPlaneación Clase Semana 6 CienciasJose Martin Martinez GarciaAún no hay calificaciones
- Hemorroides ExpoDocumento36 páginasHemorroides ExpoAngel AlvarezAún no hay calificaciones
- Mercaptanos Usados en La OdorizaciónDocumento6 páginasMercaptanos Usados en La Odorización10_Cci_120% (1)
- ATS GrúasDocumento2 páginasATS GrúasJosé Reyes GonzalezAún no hay calificaciones
- CR ÓnicaDocumento5 páginasCR ÓnicaVARGAS CCASO MARYORIE CAMILAAún no hay calificaciones
- 2.3 Estado de Costos-EstudiantesDocumento23 páginas2.3 Estado de Costos-EstudiantesMICHEL QUINTEROAún no hay calificaciones