También podría gustarte
- Teoria de Control IDocumento11 páginasTeoria de Control IGaz Letona33% (3)
- Termodinamica IDocumento14 páginasTermodinamica IVidal SanchezAún no hay calificaciones
- Control Avanzado I - Optativa I - 02!05!06Documento9 páginasControl Avanzado I - Optativa I - 02!05!06Rick VellAún no hay calificaciones
- Interes CompuestoDocumento25 páginasInteres CompuestoPAULA ANDREA GALEANO OSORIOAún no hay calificaciones
- Resumen Capitulo 6Documento2 páginasResumen Capitulo 6api-254242928100% (2)
- Interfases Perifericos y Programación IIDocumento11 páginasInterfases Perifericos y Programación IIArturoAún no hay calificaciones
- Control de M - Quinas y Procesos El - CtricosDocumento11 páginasControl de M - Quinas y Procesos El - CtricosnaviairosAún no hay calificaciones
- Teora de Control IIDocumento11 páginasTeora de Control IIclarkiAún no hay calificaciones
- Controladores IndustrialesDocumento8 páginasControladores IndustrialesLuisAún no hay calificaciones
- 26-Electronica Operacional PDFDocumento12 páginas26-Electronica Operacional PDFBeto ValenciaAún no hay calificaciones
- Sistemas Dinámicos IDocumento13 páginasSistemas Dinámicos Iturboc++Aún no hay calificaciones
- DISE O DE CONJUNTOS BisDocumento12 páginasDISE O DE CONJUNTOS BisLuisAún no hay calificaciones
- Vision Por ComputadoraDocumento11 páginasVision Por ComputadoraAlexander BaldecAún no hay calificaciones
- Control Distribuido EsimeDocumento13 páginasControl Distribuido EsimeJose De Jesus Martinez100% (1)
- 6 Sistemas ExperimentalesDocumento11 páginas6 Sistemas ExperimentalesMarco CarrilloAún no hay calificaciones
- 31-Teoria de Control IDocumento11 páginas31-Teoria de Control IAntonio RuizAún no hay calificaciones
- Sistemas Flexibles de Manufactura BisDocumento10 páginasSistemas Flexibles de Manufactura BisLuisAún no hay calificaciones
- Métodos Numéricos - IPNDocumento13 páginasMétodos Numéricos - IPNfredy8704Aún no hay calificaciones
- Mecánica de Materiales IIIDocumento10 páginasMecánica de Materiales IIIGuerrero Godinez OmarAún no hay calificaciones
- C Lulas de ManufacturaDocumento9 páginasC Lulas de ManufacturaLuisAún no hay calificaciones
- Electrónica IndustrialDocumento16 páginasElectrónica Industrialrusée19Aún no hay calificaciones
- Humanidades CuatroDocumento8 páginasHumanidades CuatroAlejandro Vela VillarealAún no hay calificaciones
- CI Practica1.1Documento9 páginasCI Practica1.1Zab VazquezAún no hay calificaciones
- 41-Instruments Analiticos de Medicion PDFDocumento12 páginas41-Instruments Analiticos de Medicion PDFnatiAún no hay calificaciones
- Programa EstaticaDocumento12 páginasPrograma EstaticaRomero Aragón Juan PabloAún no hay calificaciones
- MecanismosDocumento15 páginasMecanismosLuisAún no hay calificaciones
- Analisis EconomicoDocumento10 páginasAnalisis Economicorafaelo22Aún no hay calificaciones
- 19 DinamicaDocumento11 páginas19 DinamicaJose Antonio XDAún no hay calificaciones
- Maquinas ElectricasDocumento10 páginasMaquinas ElectricasFiliberto MtzAún no hay calificaciones
- Instalaciones El CtricasDocumento11 páginasInstalaciones El CtricasMilton Eduardo Rodríguez SerranoAún no hay calificaciones
- Generadores de VaporDocumento14 páginasGeneradores de VaporIsmael GarciaAún no hay calificaciones
- 21-Circuitos Logicos PDFDocumento12 páginas21-Circuitos Logicos PDFmoisesAún no hay calificaciones
- PRAC2COMUNICDocumento11 páginasPRAC2COMUNICRoberto LopezAún no hay calificaciones
- OleoneumaticaDocumento12 páginasOleoneumaticaKevin LA Saangre AzulAún no hay calificaciones
- Ingeniería de Manufactura IIDocumento12 páginasIngeniería de Manufactura IIIsaac Valencia TapiaAún no hay calificaciones
- Semestre03-Ecuaciones DiferencialesDocumento11 páginasSemestre03-Ecuaciones DiferencialesOscar Alam GuzmánAún no hay calificaciones
- Administracion Yahorro de Energia PDFDocumento13 páginasAdministracion Yahorro de Energia PDFDaniel HernandezAún no hay calificaciones
- Instrumentacion AutomotrizDocumento11 páginasInstrumentacion Automotrizhugo venturaAún no hay calificaciones
- Elementos Mecánicos (Temario)Documento11 páginasElementos Mecánicos (Temario)Nerfe NelnotedigoAún no hay calificaciones
- Programa HDP115Documento4 páginasPrograma HDP115aldemaro24Aún no hay calificaciones
- Introducción A La Ciencia de Los Materiales IcmDocumento10 páginasIntroducción A La Ciencia de Los Materiales IcmMihkel VeLóAún no hay calificaciones
- Norma ISA s5.5Documento2 páginasNorma ISA s5.5IrwinChangAún no hay calificaciones
- Instrumentación y ControlDocumento12 páginasInstrumentación y ControlVilchis Barajas UrielAún no hay calificaciones
- Asignaturas Mecanica 2016Documento602 páginasAsignaturas Mecanica 2016Mayrym Rey ConAún no hay calificaciones
- Problemas para La Clase de HoyDocumento94 páginasProblemas para La Clase de Hoyjuliomejia490Aún no hay calificaciones
- Ing en Electrónica y AutomatizaciónDocumento21 páginasIng en Electrónica y AutomatizaciónPedro Bernal RosasAún no hay calificaciones
- Electronica OperacionalDocumento12 páginasElectronica OperacionalGaz Letona100% (2)
- Termodinámica IDocumento24 páginasTermodinámica IAbraham Ruiz AvilesAún no hay calificaciones
- SISTEMASDECONTROLCLASICO UndefinedDocumento7 páginasSISTEMASDECONTROLCLASICO UndefinedLuis angel Pérez paucarAún no hay calificaciones
- Plan Asignatura ModeladoDocumento6 páginasPlan Asignatura ModeladoMarcoRuizAún no hay calificaciones
- EE-616-Syllabus DosificadoDocumento4 páginasEE-616-Syllabus DosificadoLuis Alva FuertesAún no hay calificaciones
- SISTEMASDECONTROLMODERNO UndefinedDocumento6 páginasSISTEMASDECONTROLMODERNO UndefinedSergio Solar melendezAún no hay calificaciones
- Syllabus Control DigitalDocumento6 páginasSyllabus Control DigitalMireya NacevillaAún no hay calificaciones
- 299006-Syllabus Control DigitalDocumento8 páginas299006-Syllabus Control DigitalDavid Aguilar LlanosAún no hay calificaciones
- 1.presentacion Automatizacion 2023 IDocumento16 páginas1.presentacion Automatizacion 2023 Ie2014200426gAún no hay calificaciones
- Modelado de Sistemas PDFDocumento11 páginasModelado de Sistemas PDFGaz LetonaAún no hay calificaciones
- 41 Control LinealDocumento7 páginas41 Control Linealpeter panAún no hay calificaciones
- FORMATO de PROGRAMAS Topicos Selectos de MecatronicaDocumento8 páginasFORMATO de PROGRAMAS Topicos Selectos de Mecatronicauaeh_blogAún no hay calificaciones
- Programa Sistema de Control Clasico y ModernoDocumento5 páginasPrograma Sistema de Control Clasico y ModernoAdriana CisnerosAún no hay calificaciones
- Temario Control ClásicoDocumento10 páginasTemario Control ClásicoOmar R ReyesAún no hay calificaciones
- Control ModernoDocumento2 páginasControl ModernoOctavio CIAún no hay calificaciones
- PD-Regulacion Automatica PDFDocumento3 páginasPD-Regulacion Automatica PDFpelusokidoAún no hay calificaciones
- Marcas y Patentes - SDocumento11 páginasMarcas y Patentes - SArturoAún no hay calificaciones
- Robots Manipuladores Introduccion y Estructura BasicaDocumento9 páginasRobots Manipuladores Introduccion y Estructura BasicaArturoAún no hay calificaciones
- Sistemas Flexibles y ManufacturaDocumento23 páginasSistemas Flexibles y ManufacturaArturoAún no hay calificaciones
- Apuntes Control Continuo-1Documento376 páginasApuntes Control Continuo-1ArturoAún no hay calificaciones
- Apuntes Metrologia Dimensional Tema 3Documento8 páginasApuntes Metrologia Dimensional Tema 3ArturoAún no hay calificaciones
- Taller Introduccion A MatlabDocumento14 páginasTaller Introduccion A MatlabArturoAún no hay calificaciones
- Carta A Un IngenieroDocumento2 páginasCarta A Un IngenieroArturo100% (1)
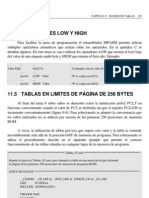
- Manejo Tablas Mayores de 256 BytesDocumento2 páginasManejo Tablas Mayores de 256 BytesFernando LaresAún no hay calificaciones
- Hay Tres Conceptos Que Se Usan Todo El Tiempo en DinámicaDocumento4 páginasHay Tres Conceptos Que Se Usan Todo El Tiempo en DinámicaGeorge OteroskyAún no hay calificaciones
- Proyecto de Tesis Del Noveno Ciclo de Escuela de Ingeniería IndustrialDocumento76 páginasProyecto de Tesis Del Noveno Ciclo de Escuela de Ingeniería IndustrialHector23-56nAún no hay calificaciones
- Ejercitario 3 - ComaFlotanteDocumento3 páginasEjercitario 3 - ComaFlotanteSukyAún no hay calificaciones
- Sesión de Matemática Del 08 de Noviembre Del 2021Documento5 páginasSesión de Matemática Del 08 de Noviembre Del 2021elizabethAún no hay calificaciones
- Diapositiva Los Tipos de MovimientoDocumento8 páginasDiapositiva Los Tipos de Movimientotiti titisAún no hay calificaciones
- Problemas de FluidizacionDocumento3 páginasProblemas de FluidizacionAlfonso VidalAún no hay calificaciones
- Migración MallaDocumento4 páginasMigración MallaMiguel Gallego OsornoAún no hay calificaciones
- Grupo 7 Analisis de Probabilidad BalotoDocumento5 páginasGrupo 7 Analisis de Probabilidad BalotoDAYAN ROJASAún no hay calificaciones
- Operaciones Con Números Reales PDFDocumento11 páginasOperaciones Con Números Reales PDFSaymy CalixAún no hay calificaciones
- Codificacion - Tabulacion - y - Analisis - de - La - Informacion Grupo CDocumento29 páginasCodificacion - Tabulacion - y - Analisis - de - La - Informacion Grupo CChristian Melendez BurgosAún no hay calificaciones
- Presentacion Secciones ConicasDocumento14 páginasPresentacion Secciones ConicasKrito LLanoAún no hay calificaciones
- Estadistica Yuly RamosDocumento9 páginasEstadistica Yuly RamosYuly ramosAún no hay calificaciones
- 2 Cinemática RectilíneaDocumento22 páginas2 Cinemática RectilíneaMarcela Granados100% (1)
- Clase de La DivisionDocumento5 páginasClase de La DivisionAngelvk50% (2)
- Probabilidad CuartoDocumento24 páginasProbabilidad CuartoYuliana Marcela Gil VascoAún no hay calificaciones
- Ballestas PDFDocumento158 páginasBallestas PDFDennisMartinezLoaizaAún no hay calificaciones
- Proyecto Cientifico # 04 Quinto A.B Maira ContrerasDocumento35 páginasProyecto Cientifico # 04 Quinto A.B Maira ContrerasmanuelAún no hay calificaciones
- La Hermosura de Dios-NierembergDocumento219 páginasLa Hermosura de Dios-NierembergALVARO GONZALEZAún no hay calificaciones
- INST TALLER N°1-2020-1 (Chancado-Harneado)Documento16 páginasINST TALLER N°1-2020-1 (Chancado-Harneado)Sebastian Sandoval100% (1)
- TallORI S04 MDS 2020 1Documento5 páginasTallORI S04 MDS 2020 1Max Helton Villanueva MendezAún no hay calificaciones
- UNIDAD 1 Implantación de SistemasDocumento11 páginasUNIDAD 1 Implantación de Sistemasjoinerjs2021100% (2)
- Fundamentos de Bases de DatosDocumento12 páginasFundamentos de Bases de Datosediaz20013Aún no hay calificaciones
- Ejercicios Resueltos C Unidad I 2015-InDocumento12 páginasEjercicios Resueltos C Unidad I 2015-InHaroldSulbaranAún no hay calificaciones
- Silabo de Estadística para Economistas 2Documento7 páginasSilabo de Estadística para Economistas 2MARY LEYDY VARGAS HUAMANIAún no hay calificaciones
- Ing. Mecánica Unefa Blog InformativoDocumento10 páginasIng. Mecánica Unefa Blog InformativoadrianAún no hay calificaciones
- Cuerpos Sumergidos en Dos o Más FluidosDocumento11 páginasCuerpos Sumergidos en Dos o Más FluidosFrancis J Carlos QAún no hay calificaciones
- 21manual Referencia Catastral RBSDocumento313 páginas21manual Referencia Catastral RBSJoseph MartinAún no hay calificaciones
- 1 Acido BaseDocumento32 páginas1 Acido BaseTonyFontanaAún no hay calificaciones