También podría gustarte
- Plan Anual Prefectura FERNANDODocumento8 páginasPlan Anual Prefectura FERNANDOfernando100% (8)
- Ejercicios 15, 23, 30Documento10 páginasEjercicios 15, 23, 30Daniel Gonzales ZayasAún no hay calificaciones
- Levantamiento Topográfico Circuito de NivelacionDocumento19 páginasLevantamiento Topográfico Circuito de NivelacionJuan Pablo Cabra GonzalezAún no hay calificaciones
- Aplicaciones Cartográficas para DronesDocumento12 páginasAplicaciones Cartográficas para DronesVictor FloresAún no hay calificaciones
- Informe de Fotogrametría Con DronesDocumento11 páginasInforme de Fotogrametría Con DronesVelkis Meribeth Zamora HuertasAún no hay calificaciones
- Aplicación de Fotogrametría Área en Levantamientos Topográficos Mediante El Uso de Vehiculos Aereos No Tripulados, Cantón La ManáDocumento8 páginasAplicación de Fotogrametría Área en Levantamientos Topográficos Mediante El Uso de Vehiculos Aereos No Tripulados, Cantón La ManáAlex IntriagoAún no hay calificaciones
- Curso - Procesamiento de Imagenes - Pix4D CoatzaDroneDroneONLINE - LaVDocumento6 páginasCurso - Procesamiento de Imagenes - Pix4D CoatzaDroneDroneONLINE - LaVPelos FuentesAún no hay calificaciones
- Phantom 4 Pro Pro Plus User Manual ESDocumento67 páginasPhantom 4 Pro Pro Plus User Manual ESPercy RobertAún no hay calificaciones
- Topografia DronesDocumento6 páginasTopografia DronesDavis Jean KarloAún no hay calificaciones
- Informe TopograficoDocumento13 páginasInforme TopograficoceciliaAún no hay calificaciones
- Levantamiento Con Drones y Estacion TotalDocumento14 páginasLevantamiento Con Drones y Estacion TotalMagdelin Tapia FelizAún no hay calificaciones
- DronesDocumento9 páginasDronescristhian francisco sanchez limaAún no hay calificaciones
- Estudio Topografico ParobambaDocumento8 páginasEstudio Topografico ParobambaAmerico Percca CcoaquiraAún no hay calificaciones
- Diapositivas Quebrada El SocavonDocumento31 páginasDiapositivas Quebrada El SocavonJose Reynaldo Vargas AriAún no hay calificaciones
- Christopher Johan Mathews - Presentacion - Huaraz - Abril2019Documento27 páginasChristopher Johan Mathews - Presentacion - Huaraz - Abril2019juan carlosAún no hay calificaciones
- Creando Una Superficie A Partir de Curvas de Nivel en CIVIL 3DDocumento47 páginasCreando Una Superficie A Partir de Curvas de Nivel en CIVIL 3Dyglesias_6333275Aún no hay calificaciones
- Dron Aplicado A La TopografiaDocumento38 páginasDron Aplicado A La TopografiaEdwin Angel Campos SanchezAún no hay calificaciones
- Fotogrametria Con DronesDocumento41 páginasFotogrametria Con DronesDiego Gamarra CandiaAún no hay calificaciones
- 2.2. Informe TopografiaDocumento32 páginas2.2. Informe TopografiaMir DJairoAún no hay calificaciones
- Instrumentos de Ultima GeneracionDocumento21 páginasInstrumentos de Ultima GeneracionAllison MendietaAún no hay calificaciones
- Introduccion Fotogrametría y Aplicación Tográfica Del UAVDocumento102 páginasIntroduccion Fotogrametría y Aplicación Tográfica Del UAVStefaniaAún no hay calificaciones
- Aeros - Fotometría Con DronesDocumento15 páginasAeros - Fotometría Con DronesChristian Villegas VelázquezAún no hay calificaciones
- Tarea IIDocumento3 páginasTarea IIAriel AlbertoAún no hay calificaciones
- Accesorio Topográfico Mira o Estadía.Documento10 páginasAccesorio Topográfico Mira o Estadía.Kiana Zobeida Checa EstupinanAún no hay calificaciones
- Clases de Dron PDFDocumento53 páginasClases de Dron PDFMarvin Mori FloresAún no hay calificaciones
- Informe de Trabajo Peru SATDocumento16 páginasInforme de Trabajo Peru SATMauricio Coaguila EsquiaAún no hay calificaciones
- Utilizacion de Drones para Fotogrametria AereaDocumento6 páginasUtilizacion de Drones para Fotogrametria AereacalmayAún no hay calificaciones
- NORMA A10 y 20 ExponerDocumento15 páginasNORMA A10 y 20 Exponermiguel100% (1)
- Geologia Clase II-la TierraDocumento40 páginasGeologia Clase II-la TierraKatherine Milagros Cencia Martinez100% (1)
- Informe para WillDocumento6 páginasInforme para WillLuis EnriqueAún no hay calificaciones
- Norma Os10Documento52 páginasNorma Os10Giancarlo Barturen ManayAún no hay calificaciones
- Informe TopograficoDocumento119 páginasInforme TopograficopparejaAún no hay calificaciones
- Noboa Luis-CvDocumento22 páginasNoboa Luis-CvesAún no hay calificaciones
- GeomaticaDocumento28 páginasGeomaticaandress peñaAún no hay calificaciones
- Informe de TopografiaDocumento9 páginasInforme de TopografiaAnonymous At0elvAún no hay calificaciones
- Fotogrametria y FotointerpretacionDocumento23 páginasFotogrametria y FotointerpretacionmarcelinoAún no hay calificaciones
- Yanapa Choque Nilton PDFDocumento133 páginasYanapa Choque Nilton PDFRuth Mardiori MamaniAún no hay calificaciones
- 2 Estación Total IntroDocumento31 páginas2 Estación Total IntroEdith HS0% (1)
- Informe SalinasDocumento21 páginasInforme Salinasjean acostaAún no hay calificaciones
- Qué Es Un Modelo Digital de SuperficieDocumento5 páginasQué Es Un Modelo Digital de Superficieluis felipe olivares lueizaAún no hay calificaciones
- Calicata y Estudio de SueloDocumento14 páginasCalicata y Estudio de Suelomarco qAún no hay calificaciones
- Satelites SpotDocumento3 páginasSatelites SpotJuan SoelAún no hay calificaciones
- Imágenes LandsatDocumento10 páginasImágenes LandsatjoelAún no hay calificaciones
- Tutorial Plan de Vuelo Emotion 3Documento9 páginasTutorial Plan de Vuelo Emotion 3pablo pedrazaAún no hay calificaciones
- 06-Informe Zona Sorcco (Final)Documento24 páginas06-Informe Zona Sorcco (Final)Crisvert Moscoso GarciaAún no hay calificaciones
- Informe de GNSSDocumento28 páginasInforme de GNSSAryam Lazo SamAún no hay calificaciones
- Fotogrametria Mediante El DronesDocumento19 páginasFotogrametria Mediante El DronesArielLlanosAún no hay calificaciones
- Bases de La GeomáticaDocumento38 páginasBases de La GeomáticaPride CanalesAún no hay calificaciones
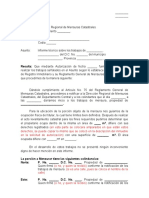
- 04 Informe Tecnico de Mensuras - ModeloDocumento2 páginas04 Informe Tecnico de Mensuras - ModeloJeneisi MartinezAún no hay calificaciones
- FOTOGRAMETRÍADocumento43 páginasFOTOGRAMETRÍALUIS GUTIERREZD100% (1)
- Resumen Clase 1 Introduccion A La TopografiaDocumento3 páginasResumen Clase 1 Introduccion A La TopografiaRodrigo Clemente CáceresAún no hay calificaciones
- 6to Informe de TopografiaDocumento18 páginas6to Informe de TopografiaJavier Carlos MoraAún no hay calificaciones
- S14 Nmalaver 2022 1Documento12 páginasS14 Nmalaver 2022 1Jomar Chavez D PAún no hay calificaciones
- Guia Pathfinder GPSDocumento29 páginasGuia Pathfinder GPSMarco CardonaAún no hay calificaciones
- Procedimiento Instalación GPS Opción Fija Epol Prueba TECKDocumento6 páginasProcedimiento Instalación GPS Opción Fija Epol Prueba TECKIván ConaAún no hay calificaciones
- Informe Cuenca Santa RitaDocumento15 páginasInforme Cuenca Santa RitaJuan Carlos Baltazar ChuquimiaAún no hay calificaciones
- Informe Técnico Cálculo de Volúmenes Ibis Del Moral 4 Lote 100 Vuelo 1 PDFDocumento15 páginasInforme Técnico Cálculo de Volúmenes Ibis Del Moral 4 Lote 100 Vuelo 1 PDFDaniel GonzalezAún no hay calificaciones
- FotogrametriaDocumento17 páginasFotogrametriarandyAún no hay calificaciones
- Monumentacion de Puntos Topograficos PDFDocumento3 páginasMonumentacion de Puntos Topograficos PDFDiego LeonAún no hay calificaciones
- I Curso de Manejo Del Dron - Ist Omate 2020okDocumento25 páginasI Curso de Manejo Del Dron - Ist Omate 2020okDominga Rosa ALVARADO CABRERAAún no hay calificaciones
- Info DronDocumento10 páginasInfo DronTaz García DiegoAún no hay calificaciones
- Para Estudiar Software para Fotogrametría Con DronesDocumento5 páginasPara Estudiar Software para Fotogrametría Con DronesMarioli MerasAún no hay calificaciones
- Modelo Carta Empresa Certificacion de Competencias FinalDocumento1 páginaModelo Carta Empresa Certificacion de Competencias FinalJulio Cesar GarciaAún no hay calificaciones
- Anexo 3 Avance Curso Práctica Profesional.Documento12 páginasAnexo 3 Avance Curso Práctica Profesional.Julio Cesar GarciaAún no hay calificaciones
- Anexo 1 Formato Plan de Trabajo Practica.Documento9 páginasAnexo 1 Formato Plan de Trabajo Practica.Julio Cesar GarciaAún no hay calificaciones
- Garantía TVDocumento1 páginaGarantía TVJulio Cesar GarciaAún no hay calificaciones
- Trabajo de Español 1Documento7 páginasTrabajo de Español 1Julio Cesar GarciaAún no hay calificaciones
- INTERROGANTES DE EDUCACION RELIGIOSA - Sergio Andres RuedaDocumento3 páginasINTERROGANTES DE EDUCACION RELIGIOSA - Sergio Andres RuedaJulio Cesar GarciaAún no hay calificaciones
- Ficha de Simulacro ExcelDocumento5 páginasFicha de Simulacro ExcelAna Luisa Gonzales SaldañaAún no hay calificaciones
- A - Pares 1-323Documento298 páginasA - Pares 1-323pattyral100% (1)
- Ipanú Campañas 5-6-2024Documento75 páginasIpanú Campañas 5-6-2024prada4900Aún no hay calificaciones
- AnatomiaDocumento4 páginasAnatomiaPatty Fiorella Castañeda ReyesAún no hay calificaciones
- 1 Examen Neuropsicologico 1Documento27 páginas1 Examen Neuropsicologico 1Piero Emmanuel G AlvaAún no hay calificaciones
- Clase 3. Propiedades de La REMDocumento24 páginasClase 3. Propiedades de La REMÁlvaro Chamorro CalixtoAún no hay calificaciones
- Ensayo 4Documento27 páginasEnsayo 4Dariio HerediiaAún no hay calificaciones
- Acta 05. Comite de Filosofía 2021Documento4 páginasActa 05. Comite de Filosofía 2021Jose Daniel Bermudez OchoaAún no hay calificaciones
- Alocucion Ataque Al Regimiento de Infanteria 29 de FormosaDocumento7 páginasAlocucion Ataque Al Regimiento de Infanteria 29 de Formosaelrefugiodelrecluta100% (1)
- Formato Seguimiento Sisat, Enero 2019Documento15 páginasFormato Seguimiento Sisat, Enero 2019Beatriz GonzalezAún no hay calificaciones
- S01.s1 Resolver Ejercicios PDFDocumento2 páginasS01.s1 Resolver Ejercicios PDFcristian yzquierdo quispeAún no hay calificaciones
- Reglamento Monusta2017Documento35 páginasReglamento Monusta2017Santiago Mendez GonzalezAún no hay calificaciones
- Poema EscritoDocumento4 páginasPoema EscritoGabriel OROPEZAAún no hay calificaciones
- Las 5 Plantas CarnívorasDocumento6 páginasLas 5 Plantas CarnívorasOtoniel Cal QuejAún no hay calificaciones
- Apersonamiento PenalDocumento2 páginasApersonamiento PenalVictor Agustin Ramos Herrera0% (1)
- Foro MicroeconomiaDocumento5 páginasForo MicroeconomiaPatho LoVe SanchezAún no hay calificaciones
- Memoria Descriptiva Arquitectura Parcela 117Documento20 páginasMemoria Descriptiva Arquitectura Parcela 117rosaelena33Aún no hay calificaciones
- Importacion de ChinaDocumento7 páginasImportacion de ChinaJOSEAún no hay calificaciones
- I1 SolDocumento5 páginasI1 SolAlejandro LoorAún no hay calificaciones
- AlegoríaDocumento6 páginasAlegoríaMariana SabedraAún no hay calificaciones
- LABORATORIO 6 PH para La MediaDocumento5 páginasLABORATORIO 6 PH para La MediaalamierdascribdAún no hay calificaciones
- Registros en La Crianza de CuyesDocumento1 páginaRegistros en La Crianza de CuyesHijitusCuy100% (2)
- Documento Base de Contratacion - DBCDocumento46 páginasDocumento Base de Contratacion - DBCMARCELOAún no hay calificaciones
- Tarea 2 Sinonimos y AntonimosDocumento2 páginasTarea 2 Sinonimos y AntonimosJerson Willian Madueño RamosAún no hay calificaciones
- Unidad I FcepDocumento17 páginasUnidad I FcepYsalis PaezAún no hay calificaciones
- Tantra Autoerotismo B22Documento2 páginasTantra Autoerotismo B22Silvano L. Gómez AAún no hay calificaciones
- Taller de Liderazgo y El Poder CarismaticoDocumento6 páginasTaller de Liderazgo y El Poder CarismaticoElmer GarcíaAún no hay calificaciones
- Practica 1Documento5 páginasPractica 1alda_mikeAún no hay calificaciones