0% encontró este documento útil (0 votos)
714 vistas46 páginasUNIDAD 3 - Transformada Z
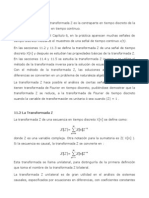
Este documento describe la transformada Z, que es una herramienta útil para el análisis de señales y sistemas de tiempo discreto. La transformada Z es análoga a la transformación de Laplace para sistemas de tiempo continuo. Se define la transformada Z de una secuencia, y se discuten conceptos como la región de convergencia y la transformada Z inversa. También se describen algunas propiedades clave y aplicaciones de la transformada Z, como el análisis de sistemas lineales invariantes en el tiempo.
Cargado por
CESAR FELIX VILCATOMA SAEZDerechos de autor
© © All Rights Reserved
Nos tomamos en serio los derechos de los contenidos. Si sospechas que se trata de tu contenido, reclámalo aquí.
Formatos disponibles
Descarga como PDF, TXT o lee en línea desde Scribd
0% encontró este documento útil (0 votos)
714 vistas46 páginasUNIDAD 3 - Transformada Z
Este documento describe la transformada Z, que es una herramienta útil para el análisis de señales y sistemas de tiempo discreto. La transformada Z es análoga a la transformación de Laplace para sistemas de tiempo continuo. Se define la transformada Z de una secuencia, y se discuten conceptos como la región de convergencia y la transformada Z inversa. También se describen algunas propiedades clave y aplicaciones de la transformada Z, como el análisis de sistemas lineales invariantes en el tiempo.
Cargado por
CESAR FELIX VILCATOMA SAEZDerechos de autor
© © All Rights Reserved
Nos tomamos en serio los derechos de los contenidos. Si sospechas que se trata de tu contenido, reclámalo aquí.
Formatos disponibles
Descarga como PDF, TXT o lee en línea desde Scribd