También podría gustarte
- Informe Abril SignedDocumento7 páginasInforme Abril SignedJonathan ProcelAún no hay calificaciones
- Practica 3Documento5 páginasPractica 3Alejandro LorAún no hay calificaciones
- 13-Mecanica de Fluidos-17 PDFDocumento20 páginas13-Mecanica de Fluidos-17 PDFagra_77Aún no hay calificaciones
- Laboratorio7 Diseño Control Adelanto FaseDocumento14 páginasLaboratorio7 Diseño Control Adelanto FaseDanyels GvAún no hay calificaciones
- Métodos Newmark y WilsonDocumento24 páginasMétodos Newmark y WilsonPaul A. VillacisAún no hay calificaciones
- Informe 2 Relación Gráfica Entre VariablesDocumento7 páginasInforme 2 Relación Gráfica Entre VariablesandresAún no hay calificaciones
- Articulo DosDocumento25 páginasArticulo DosIsabel LastraAún no hay calificaciones
- Taller Splines y Diferenciación NuméricaDocumento3 páginasTaller Splines y Diferenciación NuméricaJuan David Granja GarcesAún no hay calificaciones
- Resumen Ecuacion IDF IAHR2024Documento2 páginasResumen Ecuacion IDF IAHR2024ferakugregorAún no hay calificaciones
- Respuesta DinamicaDocumento20 páginasRespuesta DinamicaAbnEr RamOsAún no hay calificaciones
- C801 - Tarea 08 - CHAVEZ SANDOVAL - MENDOZA SULCARAY - Parte 01 - Gauss LegendreDocumento9 páginasC801 - Tarea 08 - CHAVEZ SANDOVAL - MENDOZA SULCARAY - Parte 01 - Gauss LegendreDante ChavezAún no hay calificaciones
- Carles Ursi01 20280Documento2 páginasCarles Ursi01 20280Andrea Victoria O. E.Aún no hay calificaciones
- Informe de TrabajoDocumento21 páginasInforme de TrabajoDiabolinkMANAún no hay calificaciones
- 14-Simulacion Proc Ind - Respuesta en FrecuenciaDocumento36 páginas14-Simulacion Proc Ind - Respuesta en FrecuenciaStefany ISAún no hay calificaciones
- LABM2Documento7 páginasLABM2EDGAR ANDRES SANGOQUIZA QUINGAAún no hay calificaciones
- Laboratorio 1 - MC516 - Chipana ArellanoDocumento9 páginasLaboratorio 1 - MC516 - Chipana ArellanodennisAún no hay calificaciones
- Asignacion 1Documento8 páginasAsignacion 1NINTHHARPAún no hay calificaciones
- 06-Simulacion Numerica Del Movimiento de Un OsciladorDocumento3 páginas06-Simulacion Numerica Del Movimiento de Un OsciladorjhoelAún no hay calificaciones
- PRÁCTICA 4 Paul Torres JaraluisDocumento23 páginasPRÁCTICA 4 Paul Torres JaraluisMenaly LuzuriagaAún no hay calificaciones
- Ilovepdf Merged PDFDocumento17 páginasIlovepdf Merged PDFGerman Galdamez OvandoAún no hay calificaciones
- Brazos RigidosDocumento8 páginasBrazos RigidosFrank Adams Guerrero ReyesAún no hay calificaciones
- Lab TC 2Documento4 páginasLab TC 2ReyesArangurenJuanAún no hay calificaciones
- T1MNSMDocumento3 páginasT1MNSMCesar Vargas ArayaAún no hay calificaciones
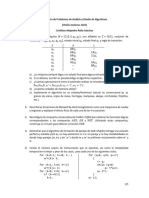
- Lista 1 de Problemas de Análisis y Diseño de Algoritmos (Otoño-Invierno2023)Documento5 páginasLista 1 de Problemas de Análisis y Diseño de Algoritmos (Otoño-Invierno2023)melissa DominguezAún no hay calificaciones
- Taller 6 - Spline Cúbico - Integración y Diferenciación NuméricaDocumento3 páginasTaller 6 - Spline Cúbico - Integración y Diferenciación NuméricaChristian RengifoAún no hay calificaciones
- Proyecto Catedra Avance1Documento7 páginasProyecto Catedra Avance1Samuel Granados MejíaAún no hay calificaciones
- Masa ConsistenteDocumento11 páginasMasa ConsistenteAlvaro jimenezAún no hay calificaciones
- Generalidades Del Software AFgrowDocumento66 páginasGeneralidades Del Software AFgrowsegundosoporteAún no hay calificaciones
- Informe Tanques FestoDocumento13 páginasInforme Tanques FestoJhon MendozaAún no hay calificaciones
- Proyecto Final, Control 2Documento8 páginasProyecto Final, Control 2alvarogr28Aún no hay calificaciones
- TALLER MAYO 14 - Josue Perez (T00050802) y Kener Castañeda (T00062054)Documento8 páginasTALLER MAYO 14 - Josue Perez (T00050802) y Kener Castañeda (T00062054)Josue PerezAún no hay calificaciones
- 203041A 764 Fase2 "Consolidado"Documento17 páginas203041A 764 Fase2 "Consolidado"Esneyder QuevedoAún no hay calificaciones
- Actividad 2 - Análisis de Sistemas RealimentadosDocumento10 páginasActividad 2 - Análisis de Sistemas RealimentadosFrancisco Aguilar RiveraAún no hay calificaciones
- Unidad 2 Tarea 2 Senales y SistemasDocumento13 páginasUnidad 2 Tarea 2 Senales y SistemasJulian CelisAún no hay calificaciones
- Paper EDSC-02 JMC2023 CondensadorDocumento9 páginasPaper EDSC-02 JMC2023 CondensadorToti CendoyaAún no hay calificaciones
- Guia 5Documento8 páginasGuia 5luis miguel GarciaAún no hay calificaciones
- Control DigitalDocumento10 páginasControl Digitaljajs130% (1)
- P3 EnunciadoDocumento6 páginasP3 EnunciadoAngela MartínAún no hay calificaciones
- Morocho-Sanchez Practica 7Documento13 páginasMorocho-Sanchez Practica 7Wilson MorochoAún no hay calificaciones
- Practica1 Dinamica Parra Roblez BenavidesDocumento16 páginasPractica1 Dinamica Parra Roblez BenavidesDivaldo Rafael Parra MallaAún no hay calificaciones
- Documento Tecnico 2Documento38 páginasDocumento Tecnico 2Roberto Enrique PinedaAún no hay calificaciones
- P2 EnunciadoDocumento6 páginasP2 EnunciadoAngela MartínAún no hay calificaciones
- Oscilaciones AmortiguadasDocumento10 páginasOscilaciones AmortiguadasJuan Carlos RochaAún no hay calificaciones
- Taller3 Coutts RamosDocumento11 páginasTaller3 Coutts RamosFERNANDO COUTTSAún no hay calificaciones
- Proyecto PDFDocumento4 páginasProyecto PDFPedro Fabrizio Zavaleta MatíasAún no hay calificaciones
- Informe FebreroDocumento5 páginasInforme FebreroJonathan ProcelAún no hay calificaciones
- Actividades Previas Al LaboratorioDocumento8 páginasActividades Previas Al LaboratorioOperaciones Carga Líquida ALITRANSCOL S.A.S.Aún no hay calificaciones
- Practica Deformacion PDFDocumento15 páginasPractica Deformacion PDFSaulo TrejoAún no hay calificaciones
- Guía Práctica de Diseño en Frecuencia y en Tiempo DiscretoDocumento25 páginasGuía Práctica de Diseño en Frecuencia y en Tiempo DiscretoEdú QuinoAún no hay calificaciones
- FISICA LaboratorioDocumento28 páginasFISICA LaboratorioElizabeth ValladaresAún no hay calificaciones
- Método de NewmarkDocumento13 páginasMétodo de NewmarkAngel Fernando Orellana Chipantiza100% (1)
- Modelos GAMLSSDocumento11 páginasModelos GAMLSSJuan Camilo Rodriguez SaninAún no hay calificaciones
- Lab Virtual Practica #2 - Mecanica - 2020-3Documento10 páginasLab Virtual Practica #2 - Mecanica - 2020-3NICOLAS MAURICIO CRIADO BERMUDEZAún no hay calificaciones
- Regresión Anidada. KeylaDocumento10 páginasRegresión Anidada. KeylaYenny AñezAún no hay calificaciones
- Practica 1 Metodos Numericos 2do ParcialDocumento4 páginasPractica 1 Metodos Numericos 2do ParcialXimena Villca NinaAún no hay calificaciones
- Masa Consistente Elementos Finitos 2DDocumento8 páginasMasa Consistente Elementos Finitos 2DAlvaro jimenezAún no hay calificaciones
- Proyecto Dinamica de Sistemas (Suspension)Documento16 páginasProyecto Dinamica de Sistemas (Suspension)Germán PérezAún no hay calificaciones
- Geometric modeling in computer: Aided geometric designDe EverandGeometric modeling in computer: Aided geometric designAún no hay calificaciones
- Cortes de gráficos de visión por computadora: Explorando cortes de gráficos en visión por computadoraDe EverandCortes de gráficos de visión por computadora: Explorando cortes de gráficos en visión por computadoraAún no hay calificaciones
- Método de ajuste de nivel: Avances en la visión por computadora, exploración del método de conjunto de nivelesDe EverandMétodo de ajuste de nivel: Avances en la visión por computadora, exploración del método de conjunto de nivelesAún no hay calificaciones
- Criterio de EvaluaciónDocumento1 páginaCriterio de EvaluaciónJonathan ProcelAún no hay calificaciones
- Instrucciones para El Proyecto FinalDocumento2 páginasInstrucciones para El Proyecto FinalJonathan ProcelAún no hay calificaciones
- Recepción Materiales de SoldaduraDocumento4 páginasRecepción Materiales de SoldaduraJonathan ProcelAún no hay calificaciones
- 013 SignedDocumento1 página013 SignedJonathan ProcelAún no hay calificaciones
- PinturaDocumento8 páginasPinturaJonathan ProcelAún no hay calificaciones
- Ilovepdf - Merged (1PPDocumento12 páginasIlovepdf - Merged (1PPJonathan ProcelAún no hay calificaciones
- En Portada: Comportamiento Del Consumidor: Aportaciones de La PsicologíaDocumento5 páginasEn Portada: Comportamiento Del Consumidor: Aportaciones de La PsicologíaJonathan ProcelAún no hay calificaciones
- 3 +preprocesamiento+de+datos+ (Pres)Documento42 páginas3 +preprocesamiento+de+datos+ (Pres)Jonathan ProcelAún no hay calificaciones
- Formulario Registro Practicas PreprofesionalesDocumento1 páginaFormulario Registro Practicas PreprofesionalesJonathan ProcelAún no hay calificaciones
- Sistema Contracarga Proyecto Pimi 18Documento2 páginasSistema Contracarga Proyecto Pimi 18Jonathan ProcelAún no hay calificaciones
- FinancieroDocumento55 páginasFinancieroJonathan ProcelAún no hay calificaciones
- T2557 MAE Loor Estudio PDFDocumento100 páginasT2557 MAE Loor Estudio PDFJonathan ProcelAún no hay calificaciones
- Estudio de MercadoDocumento11 páginasEstudio de MercadoJonathan ProcelAún no hay calificaciones
- Analisis de ImplicadosDocumento1 páginaAnalisis de ImplicadosJonathan ProcelAún no hay calificaciones
- Guía de Examen Derecho Procesal 1Documento3 páginasGuía de Examen Derecho Procesal 1vane.mendoza2304Aún no hay calificaciones
- Grafeno Diapositivas FinalDocumento25 páginasGrafeno Diapositivas FinalMonica Burke100% (1)
- DLA CALIDAD, SU EVOLUCIÓN HISTÓRICA Y ALGUNOS CONCEPTOS Y TÉRMINOS ASOCIADOS GestioPolis - HTMDocumento30 páginasDLA CALIDAD, SU EVOLUCIÓN HISTÓRICA Y ALGUNOS CONCEPTOS Y TÉRMINOS ASOCIADOS GestioPolis - HTMXFiremanxAún no hay calificaciones
- Demanda Divorcio Santa CruzDocumento6 páginasDemanda Divorcio Santa CruzMarianita VillalonAún no hay calificaciones
- Los Instrumentos de La Política FiscalDocumento11 páginasLos Instrumentos de La Política FiscalChristelMendezAún no hay calificaciones
- Practica 1 ALDocumento2 páginasPractica 1 ALAna HernándezAún no hay calificaciones
- Sistema de Abastecimiento de Agua Potable en CajamarcaDocumento6 páginasSistema de Abastecimiento de Agua Potable en CajamarcaLuis Gerardo Bazan EscalanteAún no hay calificaciones
- Contrato de GarantiasDocumento11 páginasContrato de GarantiasMile AlvaAún no hay calificaciones
- Television Digital Unidad Ii 2.1 1 2021Documento66 páginasTelevision Digital Unidad Ii 2.1 1 2021Carlos PedrazaAún no hay calificaciones
- Inyección A Gasolina IDocumento59 páginasInyección A Gasolina Idimar wilder estrada cavero100% (2)
- Psicologia y EconomiaDocumento5 páginasPsicologia y EconomiaMayherly Darlyn ZallesAún no hay calificaciones
- Proyecto de Proyección SocialDocumento12 páginasProyecto de Proyección SocialMélany Solansh MeléndezAún no hay calificaciones
- Formato de Divorcio Incausado en QueretaroDocumento2 páginasFormato de Divorcio Incausado en QueretaroJorge Lares NavarreteAún no hay calificaciones
- Fotocopiables MaterialesDocumento11 páginasFotocopiables MaterialesMariela MoisesAún no hay calificaciones
- FINAL PPT - PDocumento5 páginasFINAL PPT - PJEREMIAS VICENTE CORIMANYA CCALLOAún no hay calificaciones
- Contrato Privado de Traspaso de Lote A Titulo Gratuito Con Venta de MejorasDocumento1 páginaContrato Privado de Traspaso de Lote A Titulo Gratuito Con Venta de MejorasMiguel Angel Flores Sosa67% (3)
- A8 - ORAF Dictámenes Fiscales UVMDocumento8 páginasA8 - ORAF Dictámenes Fiscales UVMOscar AguilarAún no hay calificaciones
- Los Materiales y Su Impacto en El Medio AmbienteDocumento8 páginasLos Materiales y Su Impacto en El Medio AmbienteAndres NaranjoAún no hay calificaciones
- Lab 1 Hidra Tito AriasDocumento31 páginasLab 1 Hidra Tito AriasBritner Tito AriasAún no hay calificaciones
- Instalaciones Sanitarias JPC Construccion 2Documento54 páginasInstalaciones Sanitarias JPC Construccion 2Ever CariAún no hay calificaciones
- Matriz de Leopold 1-InformeDocumento27 páginasMatriz de Leopold 1-InformeDeivy Becerra VasquezAún no hay calificaciones
- Oficio Múltiple #00007-2023-Minedu/Dm-Fondep-Fondep-G: Gerente Regional de Educación Director (A) Regional de EducaciónDocumento1 páginaOficio Múltiple #00007-2023-Minedu/Dm-Fondep-Fondep-G: Gerente Regional de Educación Director (A) Regional de EducaciónMaría MercedAún no hay calificaciones
- Recurso de Apelación AdministrativoDocumento15 páginasRecurso de Apelación AdministrativoelvirreAún no hay calificaciones
- ✰La chica de la bicicleta✰⟪⍣Ɛʍყ G⍣⟫Anya RitDocumento18 páginas✰La chica de la bicicleta✰⟪⍣Ɛʍყ G⍣⟫Anya RitshaynaAún no hay calificaciones
- I - FuhuDocumento11 páginasI - FuhuAlex Flores valdizanAún no hay calificaciones
- Convenios en HigieneDocumento7 páginasConvenios en HigieneerwisAún no hay calificaciones
- Diapositivas BPMDocumento10 páginasDiapositivas BPMvelasquezmateo3Aún no hay calificaciones
- Lab Sav 7Documento10 páginasLab Sav 7scrillex12345Aún no hay calificaciones
- Evaluación Del Desempeño 5.4.1. Concepto Y MetodosDocumento11 páginasEvaluación Del Desempeño 5.4.1. Concepto Y MetodosMarie Del AngelAún no hay calificaciones
- Memoria DescriptivaDocumento5 páginasMemoria DescriptivaMaria Carmen Romero MonzonAún no hay calificaciones