También podría gustarte
- Practica 1 (Dinámica de Sistemas)Documento12 páginasPractica 1 (Dinámica de Sistemas)Rogelio D' SantiagoAún no hay calificaciones
- Informe de La VISITA A LA REPRESA GALLITO CIEGODocumento30 páginasInforme de La VISITA A LA REPRESA GALLITO CIEGORonald VerasteguiAún no hay calificaciones
- Control DigitalDocumento11 páginasControl Digitaljorge roblesAún no hay calificaciones
- Pos BDocumento4 páginasPos BSamuel Granados MejíaAún no hay calificaciones
- Actividades A Desarrollar-Fase 1Documento10 páginasActividades A Desarrollar-Fase 1erick DHozAún no hay calificaciones
- Lab 2 Transformada Laplace 2018Documento9 páginasLab 2 Transformada Laplace 2018MumulAún no hay calificaciones
- 203041A 764 Fase2 "Consolidado"Documento17 páginas203041A 764 Fase2 "Consolidado"Esneyder QuevedoAún no hay calificaciones
- Tarea 2.1 CaroDocumento14 páginasTarea 2.1 CaroDaniel PancheAún no hay calificaciones
- PS2383 Grupo 2 Prelaboratorio 1Documento7 páginasPS2383 Grupo 2 Prelaboratorio 1Paola AlarconAún no hay calificaciones
- Tarea 1 - Dinámica y Estabilidad de Sistemas ContinuosDocumento27 páginasTarea 1 - Dinámica y Estabilidad de Sistemas ContinuosCam Mcm PvcAún no hay calificaciones
- Proyecto CT II 20201 PDFDocumento9 páginasProyecto CT II 20201 PDFDaniel BoteroAún no hay calificaciones
- Segundoavance CDocumento9 páginasSegundoavance CSamuel Granados MejíaAún no hay calificaciones
- Laboratorio6 - Diseño - Control PIDDocumento29 páginasLaboratorio6 - Diseño - Control PIDWilson MorochoAún no hay calificaciones
- Analisis de La Respuesta Transitoria y Estacionaria v1Documento21 páginasAnalisis de La Respuesta Transitoria y Estacionaria v1Juan C GamboaAún no hay calificaciones
- Analisis de La Respuesta Transitoria y Estacionaria v1Documento21 páginasAnalisis de La Respuesta Transitoria y Estacionaria v1Juan C GamboaAún no hay calificaciones
- Reporte Práctica 1Documento10 páginasReporte Práctica 1Erick Uriel Sánchez CastilloAún no hay calificaciones
- Laboratorio7 Diseño Control Adelanto FaseDocumento14 páginasLaboratorio7 Diseño Control Adelanto FaseDanyels GvAún no hay calificaciones
- Sistemas de ControDocumento26 páginasSistemas de ControJORGE ARIEL CHICAIZA CHILUIZAAún no hay calificaciones
- Control Lab 2Documento24 páginasControl Lab 2Juan Cornejo huancaAún no hay calificaciones
- Laboratorio 2 F.Documento7 páginasLaboratorio 2 F.Alvaro LCAún no hay calificaciones
- Evaluacion #Controladores IndustrialesDocumento13 páginasEvaluacion #Controladores IndustrialesFELIPE CATRILAún no hay calificaciones
- Práctica 1. Control 1Documento18 páginasPráctica 1. Control 1Alexis TinajeroAún no hay calificaciones
- Practica Inductoria 2Documento14 páginasPractica Inductoria 2Hector Alfonso Sotelo MoraAún no hay calificaciones
- Laboratorio N°9Documento15 páginasLaboratorio N°9Didier Hernández100% (1)
- Modelado Matemático de Sistemas FísicosDocumento44 páginasModelado Matemático de Sistemas FísicosRicardoSntiagoAún no hay calificaciones
- Modelos Matematicos y Funciones de TransferenciaDocumento12 páginasModelos Matematicos y Funciones de TransferenciaFHERFFFAún no hay calificaciones
- Tarea 9 Función de TransferenciaDocumento4 páginasTarea 9 Función de TransferenciaEdwinGioMoralesAún no hay calificaciones
- Problemas de Control I - 2019 B PDFDocumento6 páginasProblemas de Control I - 2019 B PDFXavier Palacios0% (1)
- Practica SERVOMECANISMO NEUMÁTICODocumento10 páginasPractica SERVOMECANISMO NEUMÁTICOClara CastilloAún no hay calificaciones
- Lab 2Documento45 páginasLab 2Lenny RayssaAún no hay calificaciones
- Control DigitalDocumento10 páginasControl Digitaljajs130% (1)
- Control 3Documento14 páginasControl 3RenzoMahrAún no hay calificaciones
- SonquilloDocumento12 páginasSonquilloANTHONY VALENCIA ZUTAAún no hay calificaciones
- Respuesta Transitoria-Control AutomaticoDocumento13 páginasRespuesta Transitoria-Control AutomaticoADOLFO HERNANDEZ MARTINEZAún no hay calificaciones
- Acondicionamiento de SeñalesDocumento9 páginasAcondicionamiento de SeñalesAllison ElianaAún no hay calificaciones
- Tarea #2Documento9 páginasTarea #2Helenis Macias GonzalezAún no hay calificaciones
- SimulinkDocumento3 páginasSimulinkDaniel MuñozAún no hay calificaciones
- ASIYSEG6E4RRSDDocumento24 páginasASIYSEG6E4RRSDDanae Guadalupe Perez NicolasAún no hay calificaciones
- 203041-1 - Fase 2 - David BolañoDocumento17 páginas203041-1 - Fase 2 - David BolañodabAún no hay calificaciones
- Laboratorio 2 (Ejercicios y Asignaciones)Documento8 páginasLaboratorio 2 (Ejercicios y Asignaciones)Mauricio CerónAún no hay calificaciones
- I4 Cpi Cachiguango RomeroDocumento11 páginasI4 Cpi Cachiguango RomeroSebastian CachiguangoAún no hay calificaciones
- Modulo Control IIDocumento34 páginasModulo Control IIJean DelacruzAún no hay calificaciones
- LABM2Documento7 páginasLABM2EDGAR ANDRES SANGOQUIZA QUINGAAún no hay calificaciones
- Asignacion #2Documento10 páginasAsignacion #2Andres PerezAún no hay calificaciones
- Filtrado de Kalman IntroducciónDocumento12 páginasFiltrado de Kalman IntroducciónRodolfo Fernández GallardoAún no hay calificaciones
- Actividad 2 - Análisis de Sistemas RealimentadosDocumento10 páginasActividad 2 - Análisis de Sistemas RealimentadosFrancisco Aguilar RiveraAún no hay calificaciones
- Analisis de La Respuesta TransitoriaDocumento6 páginasAnalisis de La Respuesta Transitoriasolo basuraAún no hay calificaciones
- Pratica Laboratorial No1Documento3 páginasPratica Laboratorial No1RadioTv PíllaroAún no hay calificaciones
- TP1 Simulink 2021Documento3 páginasTP1 Simulink 2021chau_riberAún no hay calificaciones
- Tarea 2 Control Automatico FullDocumento33 páginasTarea 2 Control Automatico FullSergio Enrique Berrios GonzalezAún no hay calificaciones
- Laboratorio1 Diagrama Bloques Simulink V2Documento8 páginasLaboratorio1 Diagrama Bloques Simulink V2AndresChangoluisaAún no hay calificaciones
- Examenes Rae 0708Documento40 páginasExamenes Rae 0708Milton Fonseca ZuritaAún no hay calificaciones
- Taller de Sistemas de Segundo Orden y Ananálisis de EstabilidadDocumento60 páginasTaller de Sistemas de Segundo Orden y Ananálisis de EstabilidadDaniel Camilo0% (1)
- Informe Lab4Documento17 páginasInforme Lab4Mguel AngelAún no hay calificaciones
- Tarea 3Documento18 páginasTarea 3Jose M CaballeroAún no hay calificaciones
- Informe Laboratorio 3 Matlab y SimulinkDocumento5 páginasInforme Laboratorio 3 Matlab y SimulinkJuan Alejandro Cañas ColoradoAún no hay calificaciones
- Practica1 - MFTDocumento5 páginasPractica1 - MFTILIDAN STORMAún no hay calificaciones
- Matemáticas avanzadas aplicadas para ingenieríaDe EverandMatemáticas avanzadas aplicadas para ingenieríaAún no hay calificaciones
- Ejercicios de Integrales de Línea, Superficie y VolumenDe EverandEjercicios de Integrales de Línea, Superficie y VolumenCalificación: 4 de 5 estrellas4/5 (2)
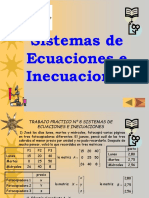
- 08 Sistemas de Ecuaciones e InecuacionesDocumento51 páginas08 Sistemas de Ecuaciones e InecuacionesManita Poble LuAún no hay calificaciones
- CP350Documento1 páginaCP350Samuel Granados MejíaAún no hay calificaciones
- Memoria de Calculo Sub EstaciónDocumento6 páginasMemoria de Calculo Sub EstaciónSamuel Granados MejíaAún no hay calificaciones
- Enviar ETAPA TECNICA 1 Part SDocumento21 páginasEnviar ETAPA TECNICA 1 Part SSamuel Granados MejíaAún no hay calificaciones
- Preguntas ConvercionDocumento4 páginasPreguntas ConvercionSamuel Granados MejíaAún no hay calificaciones
- Tarea 1Documento3 páginasTarea 1Samuel Granados MejíaAún no hay calificaciones
- Detalle Estructura en "H" 3 X 75 Kva Vista Perfil Estructura "H" 3 X 75 KvaDocumento1 páginaDetalle Estructura en "H" 3 X 75 Kva Vista Perfil Estructura "H" 3 X 75 KvaSamuel Granados MejíaAún no hay calificaciones
- Consultas Eléctricas Centro ComercialDocumento1 páginaConsultas Eléctricas Centro ComercialSamuel Granados MejíaAún no hay calificaciones
- Cuestionario Segmento A de PreguntasDocumento4 páginasCuestionario Segmento A de PreguntasSamuel Granados MejíaAún no hay calificaciones
- Anexo ADocumento2 páginasAnexo ASamuel Granados MejíaAún no hay calificaciones
- Anexo - Respuesta - IP 52 26 2022.Documento2 páginasAnexo - Respuesta - IP 52 26 2022.Samuel Granados MejíaAún no hay calificaciones
- Tarea de Investigacion TEEDocumento21 páginasTarea de Investigacion TEESamuel Granados MejíaAún no hay calificaciones
- Calculo de Caida de TensiónDocumento13 páginasCalculo de Caida de TensiónSamuel Granados MejíaAún no hay calificaciones
- ACLRE67 Formulario para Entrevista Conoce A Tu Cliente PJDocumento2 páginasACLRE67 Formulario para Entrevista Conoce A Tu Cliente PJeliseo131285Aún no hay calificaciones
- Carta GarantiaDocumento2 páginasCarta GarantiaAGUSTIN CARRA GONZALEZAún no hay calificaciones
- ACLRE67-1 Anexo PEP - Persona JurídicaDocumento1 páginaACLRE67-1 Anexo PEP - Persona JurídicaSamuel Granados MejíaAún no hay calificaciones
- ACLRE03 Requisitos para Servicio de Mediana y Gran Demanda v15Documento1 páginaACLRE03 Requisitos para Servicio de Mediana y Gran Demanda v15Francisco OrtegaAún no hay calificaciones
- Resp Fact LR 080043 2023Documento1 páginaResp Fact LR 080043 2023Samuel Granados MejíaAún no hay calificaciones
- Sustentación TesisDocumento46 páginasSustentación TesisSamuel Granados MejíaAún no hay calificaciones
- Evaluacion03 ArduinoDocumento1 páginaEvaluacion03 ArduinoSamuel Granados MejíaAún no hay calificaciones
- Nota Modelo para Preinspección PlagasDocumento1 páginaNota Modelo para Preinspección Plagasestivenmontoya30Aún no hay calificaciones
- Formulario de Actualizacion de Datos V2Documento1 páginaFormulario de Actualizacion de Datos V2Samuel Granados MejíaAún no hay calificaciones
- Resumen DocumentoDocumento11 páginasResumen DocumentoSamuel Granados MejíaAún no hay calificaciones
- Cuadro de Carga T-GDocumento12 páginasCuadro de Carga T-GSamuel Granados MejíaAún no hay calificaciones
- A422170 - Cot Herrajes Varios - SGDocumento2 páginasA422170 - Cot Herrajes Varios - SGSamuel Granados MejíaAún no hay calificaciones
- A422170 - Cot Herrajes Varios - SGDocumento2 páginasA422170 - Cot Herrajes Varios - SGSamuel Granados MejíaAún no hay calificaciones
- Informe Mtto. Subestacion Nte.Documento27 páginasInforme Mtto. Subestacion Nte.Samuel Granados MejíaAún no hay calificaciones
- ACLRE67 Formulario para Entrevista Conoce A Tu Cliente PJDocumento2 páginasACLRE67 Formulario para Entrevista Conoce A Tu Cliente PJeliseo131285Aún no hay calificaciones
- Ie-01 Distribucion de Luminarias Tuvet-Analiza VeneciaDocumento1 páginaIe-01 Distribucion de Luminarias Tuvet-Analiza VeneciaSamuel Granados MejíaAún no hay calificaciones
- Ejercicios Primera Ley PDFDocumento106 páginasEjercicios Primera Ley PDFSamuel Granados MejíaAún no hay calificaciones
- Matriz de CriteriosDocumento52 páginasMatriz de CriteriosFiorella Sipion RamirezAún no hay calificaciones
- Examen Computarizado Dcea 2019 Ug Ugto Universidad Guanajuato PDFDocumento2 páginasExamen Computarizado Dcea 2019 Ug Ugto Universidad Guanajuato PDFPaty RendonAún no hay calificaciones
- Hueso Alveolar IDocumento8 páginasHueso Alveolar IFiorellaOlivaresAloneinthislifeAún no hay calificaciones
- Agentes AntiviralesDocumento3 páginasAgentes AntiviralesFranli' PereiraAún no hay calificaciones
- Aditivos para ConcretoDocumento4 páginasAditivos para ConcretoMiguel AngelAún no hay calificaciones
- 7 Grafique Secciones Transversales en 3D Con ArcGIS ProDocumento15 páginas7 Grafique Secciones Transversales en 3D Con ArcGIS ProElianAún no hay calificaciones
- Mateaprendiendo Una Sumaespecial Usando La Tabla de La Caja ReistradoraDocumento6 páginasMateaprendiendo Una Sumaespecial Usando La Tabla de La Caja Reistradorajav huarangaAún no hay calificaciones
- La Criminología Es Una Ciencia Empírica e Interdisciplinaria Que Tiene Como Objeto El Estudio Del DelincuenteDocumento21 páginasLa Criminología Es Una Ciencia Empírica e Interdisciplinaria Que Tiene Como Objeto El Estudio Del DelincuenteVivian V. BravoAún no hay calificaciones
- Informe de Prorroga de PlazosDocumento12 páginasInforme de Prorroga de PlazoscortezchamorrolizAún no hay calificaciones
- Bnu U2 A2 MarzDocumento39 páginasBnu U2 A2 Marzmarisol100% (2)
- Lateralidad y GirosDocumento8 páginasLateralidad y GirosMaR¡a- P.Aún no hay calificaciones
- Experimentos 2Documento5 páginasExperimentos 2Cristhian RamirezAún no hay calificaciones
- Nuevas Tendencias en El TratamientoDocumento8 páginasNuevas Tendencias en El TratamientoThomas Madrid BellioAún no hay calificaciones
- Tejido CartilaginosoDocumento3 páginasTejido CartilaginosoAmaury Comas MontañoAún no hay calificaciones
- Clasificación de Los Intercambiadores de CalorDocumento4 páginasClasificación de Los Intercambiadores de CalorGaby Símbala FeijooAún no hay calificaciones
- Estructura UrbanaDocumento17 páginasEstructura UrbanaElena RootsAún no hay calificaciones
- El Inculpado y AbogadoDocumento25 páginasEl Inculpado y AbogadoDike NazarioAún no hay calificaciones
- El Perfil Del Docente de Educación Inicial PDFDocumento3 páginasEl Perfil Del Docente de Educación Inicial PDFaracelys88% (25)
- Lista de Materiales EndodonciaDocumento1 páginaLista de Materiales EndodonciaLeslie GarciaAún no hay calificaciones
- Comprender La Ley Del Consumidor Financiero Y Ley Habeas DataDocumento15 páginasComprender La Ley Del Consumidor Financiero Y Ley Habeas DataKATHERIN FONTALVOAún no hay calificaciones
- Los Océanos y Continentes - Guía de ActividadesDocumento3 páginasLos Océanos y Continentes - Guía de ActividadesAmaris Gonzalez100% (1)
- Clase 10 Metabolismo de Lípidos 2023Documento35 páginasClase 10 Metabolismo de Lípidos 2023Julieta Anabella RosattiAún no hay calificaciones
- Soldadura en EsquinaDocumento6 páginasSoldadura en EsquinaIAm JosueAún no hay calificaciones
- Preguntas A Expertos Del TemaDocumento1 páginaPreguntas A Expertos Del TemaAndrés OrtizAún no hay calificaciones
- Implementacion de Sistemas de Bandas Transportadoras 5.0Documento11 páginasImplementacion de Sistemas de Bandas Transportadoras 5.0jesusAún no hay calificaciones
- Gerencia Organizacional - Eje 3Documento10 páginasGerencia Organizacional - Eje 3Maria Alejandra Suarez BaronAún no hay calificaciones
- LA CREACIÓN DEL SISTEMA TERAPÉUTICO (Texto)Documento225 páginasLA CREACIÓN DEL SISTEMA TERAPÉUTICO (Texto)Alejandra100% (1)
- Puente Santa Rosa de ManquiuteDocumento10 páginasPuente Santa Rosa de ManquiuteJohanArmasAún no hay calificaciones