También podría gustarte
- Control de sistemas mecánicosDocumento24 páginasControl de sistemas mecánicosDaniel Molina100% (3)
- EVALUACION 2-Controladores-IndustrialesDocumento9 páginasEVALUACION 2-Controladores-IndustrialesAlexis JavierAún no hay calificaciones
- Definiciones de Distintos Tipos de Sistemas MatematicosDocumento21 páginasDefiniciones de Distintos Tipos de Sistemas MatematicosAugusto LismayesAún no hay calificaciones
- Ejercicios Resueltos Control AutomáticoDocumento13 páginasEjercicios Resueltos Control AutomáticoMariano IanniAún no hay calificaciones
- Taller Modelo Del Motor DCDocumento13 páginasTaller Modelo Del Motor DCDavid Santiago Diaz MachadoAún no hay calificaciones
- Regulador Lineal Cuadrático OptimoDocumento7 páginasRegulador Lineal Cuadrático OptimoBru Cervantes AnayaAún no hay calificaciones
- Matriz de Riesgos Del Grupo ÉxitoDocumento3 páginasMatriz de Riesgos Del Grupo ÉxitoAndrey Montoya100% (1)
- Ejercicios-Teoria-Control G1 N4 PDFDocumento19 páginasEjercicios-Teoria-Control G1 N4 PDFMAYRA PUEDMAGAún no hay calificaciones
- Tarea 2 Sistemas DinámicosDocumento9 páginasTarea 2 Sistemas DinámicosEdgar Duque100% (1)
- Catálogo 1 Sistema Masa-Resorte-AmortiguadorDocumento27 páginasCatálogo 1 Sistema Masa-Resorte-AmortiguadorEdmundo Rivera Veras91% (11)
- Raul Olmos Sistemas Dinamicos - Ejercicio 2Documento6 páginasRaul Olmos Sistemas Dinamicos - Ejercicio 2Luis Fernando Barrera UribeAún no hay calificaciones
- Unidad 2 - Etapa 3 - Grupo 63Documento37 páginasUnidad 2 - Etapa 3 - Grupo 63Jairo HurtatisAún no hay calificaciones
- Informe de Motor DC TranferenciaDocumento12 páginasInforme de Motor DC Tranferenciaedison cedeñoAún no hay calificaciones
- Control II bloquesDocumento17 páginasControl II bloquesPablo RamirezAún no hay calificaciones
- Fase3 DinamicosDocumento12 páginasFase3 DinamicosJorge OrozcoAún no hay calificaciones
- Deber 1Documento14 páginasDeber 1Alex PintadoAún no hay calificaciones
- Paso 3 Sergio Zapata1Documento13 páginasPaso 3 Sergio Zapata1Sertgio Zapata EspinosaAún no hay calificaciones
- E1 33 Luis Stiven PulgarinDocumento12 páginasE1 33 Luis Stiven PulgarinStevan CalatarAún no hay calificaciones
- Resultado de Aprendizaje Unidad 2 MatematicasDocumento8 páginasResultado de Aprendizaje Unidad 2 Matematicasmario alberto vasquez ramirezAún no hay calificaciones
- Informe Previo N°3Documento8 páginasInforme Previo N°3dsdAún no hay calificaciones
- Modelo Dinámico de Sistemas Mediante La Ecuación de Lagrange - FinalDocumento27 páginasModelo Dinámico de Sistemas Mediante La Ecuación de Lagrange - FinalTyronAún no hay calificaciones
- Práctica 2 SPDocumento14 páginasPráctica 2 SPPedro CarreraAún no hay calificaciones
- Primera Entre MatemáticasDocumento15 páginasPrimera Entre MatemáticasJesús Hurtado IzquierdoAún no hay calificaciones
- Control Analogo PretareaDocumento15 páginasControl Analogo PretareaComark Ponguta100% (1)
- Pre-Saberes Edwin Lievano G22Documento8 páginasPre-Saberes Edwin Lievano G22Edwin Fabian LievanoAún no hay calificaciones
- Laboratorio6 - Diseño - Control PIDDocumento29 páginasLaboratorio6 - Diseño - Control PIDWilson MorochoAún no hay calificaciones
- KalifaDocumento8 páginasKalifaAngel Alex Barrantes QuelloAún no hay calificaciones
- Práctica 3 E1 G14Documento18 páginasPráctica 3 E1 G14José Juan G.S.Aún no hay calificaciones
- LaplaceDocumento15 páginasLaplaceJesús Hurtado IzquierdoAún no hay calificaciones
- Simulación Matemática de Yacimientos TAREA 5Documento6 páginasSimulación Matemática de Yacimientos TAREA 5DianaFlomoAún no hay calificaciones
- Unidad 2Documento111 páginasUnidad 2David Franco FariasAún no hay calificaciones
- Reporte Practica 1 Equipo 9Documento18 páginasReporte Practica 1 Equipo 9Anonymous bqJDeCNIAún no hay calificaciones
- 1-Modelo Matematico T Laplace v2Documento4 páginas1-Modelo Matematico T Laplace v2KEVIN SEBASTIAN CACERES MOJICAAún no hay calificaciones
- Taller de Diseño de Una Planta de Un Sistema No Lineal de Segundo OrdenDocumento11 páginasTaller de Diseño de Una Planta de Un Sistema No Lineal de Segundo OrdenAndres FelipeAún no hay calificaciones
- Circuito Mixto RLC Ecuación DiferencialDocumento10 páginasCircuito Mixto RLC Ecuación DiferencialXiomy Romero RinconAún no hay calificaciones
- Sistema motor CC orden 2Documento18 páginasSistema motor CC orden 2peposasunaAún no hay calificaciones
- Extrapolación de Richardson PDFDocumento5 páginasExtrapolación de Richardson PDFANDRES FELIPE CARDOZO CASTILLOAún no hay calificaciones
- 02 ModeladoDocumento7 páginas02 ModeladoFran VegaAún no hay calificaciones
- Solucionario de Prob Ing ControlDocumento20 páginasSolucionario de Prob Ing ControlFernando Vasquez CornejoAún no hay calificaciones
- 3 - Planificar Métodos y Herramientas para El Diseño de Filtros DigitalesDocumento7 páginas3 - Planificar Métodos y Herramientas para El Diseño de Filtros DigitalesJOSE LUIS CASTRO LAVERDE100% (2)
- Evaluacion #Controladores IndustrialesDocumento13 páginasEvaluacion #Controladores IndustrialesFELIPE CATRILAún no hay calificaciones
- Problema 1Documento10 páginasProblema 1Gerardo Chavez CovarrubiasAún no hay calificaciones
- Tarea 3 - Análisis en El Dominio Del Tiempo GRUPO 203042 - 11 G PDFDocumento49 páginasTarea 3 - Análisis en El Dominio Del Tiempo GRUPO 203042 - 11 G PDFCristianCamiloAún no hay calificaciones
- Informe Previo 6Documento13 páginasInforme Previo 6dsdAún no hay calificaciones
- Sistema Péndulo CarretillaDocumento17 páginasSistema Péndulo CarretillaJosé MartínezAún no hay calificaciones
- Análisis de respuesta transitoriaDocumento11 páginasAnálisis de respuesta transitoriaRichard GarciaAún no hay calificaciones
- Simulación de procesosDocumento25 páginasSimulación de procesosProyectos DecimatensionAún no hay calificaciones
- Diferencias Finitas PDFDocumento25 páginasDiferencias Finitas PDFAnonymous 52Z8ZFkv100% (1)
- Simulaciones P1Documento23 páginasSimulaciones P1KevinAún no hay calificaciones
- Retenedor de Orden UnoDocumento7 páginasRetenedor de Orden Unofredy javier vilca zamataAún no hay calificaciones
- Robot Evasor de ObstaculosDocumento8 páginasRobot Evasor de ObstaculosMelanie Daniela Castillo AguilarAún no hay calificaciones
- MT227B Unidad 2a Respuesta Temporal de Sistemas Fisicos Modelados en EE 2022-1Documento61 páginasMT227B Unidad 2a Respuesta Temporal de Sistemas Fisicos Modelados en EE 2022-1Gabriel JGAún no hay calificaciones
- Control Moderno - Práctica - 4 PDFDocumento6 páginasControl Moderno - Práctica - 4 PDFIván IvanovAún no hay calificaciones
- Broyden FinalDocumento35 páginasBroyden FinalSilviaValdez100% (1)
- Pre-Tarea - Juan David CeballosDocumento18 páginasPre-Tarea - Juan David CeballosChristian David Garcia Meneses100% (1)
- Unidad 2 ADocumento109 páginasUnidad 2 ADavid Franco FariasAún no hay calificaciones
- Parcial 3 DinamicosDocumento12 páginasParcial 3 DinamicosJorge Eduardo Orozco ZunigaAún no hay calificaciones
- Avance de Electroniva Digital 2Documento8 páginasAvance de Electroniva Digital 2Andrey MontoyaAún no hay calificaciones
- Etapa 3 - G15Documento10 páginasEtapa 3 - G15Andrey MontoyaAún no hay calificaciones
- Actividad Funciones de TextoDocumento4 páginasActividad Funciones de TextoAndrey MontoyaAún no hay calificaciones
- Unidad 2 Etapa 3Documento20 páginasUnidad 2 Etapa 3Andrey MontoyaAún no hay calificaciones
- Primera Entrega Opinion PublicaDocumento11 páginasPrimera Entrega Opinion PublicaAndrey MontoyaAún no hay calificaciones
- Etapa 5 Sistemas de Maquinas ElectricasDocumento12 páginasEtapa 5 Sistemas de Maquinas ElectricasAndrey MontoyaAún no hay calificaciones
- Guía para El Desarrollo Del Componente Práctico y Rúbrica de Evaluación - Unidad 3 - Etapa 4 - Componente Práctico - Prácticas SimuladasDocumento10 páginasGuía para El Desarrollo Del Componente Práctico y Rúbrica de Evaluación - Unidad 3 - Etapa 4 - Componente Práctico - Prácticas SimuladasAndrey MontoyaAún no hay calificaciones
- Unidad 4 Practicas SimuladasDocumento9 páginasUnidad 4 Practicas SimuladasAndrey MontoyaAún no hay calificaciones
- Parcial Final 2Documento8 páginasParcial Final 2Andrey MontoyaAún no hay calificaciones
- Etica Empresarial Escenario 4 y 5 Corr.Documento2 páginasEtica Empresarial Escenario 4 y 5 Corr.Andrey MontoyaAún no hay calificaciones
- Pensamiento Estrategico12Documento5 páginasPensamiento Estrategico12Andrey MontoyaAún no hay calificaciones
- Entrega 1 de Auditoria Financiera 16 NoviembreDocumento12 páginasEntrega 1 de Auditoria Financiera 16 NoviembreAndrey MontoyaAún no hay calificaciones
- Ejercicio 2Documento1 páginaEjercicio 2Andrey MontoyaAún no hay calificaciones
- Auditoria Financiera Segunda EntregaDocumento9 páginasAuditoria Financiera Segunda EntregaAndrey MontoyaAún no hay calificaciones
- ArgumentacionDocumento12 páginasArgumentacionAndrey MontoyaAún no hay calificaciones
- Lluvia de Ideas Cultura AmbientalDocumento1 páginaLluvia de Ideas Cultura AmbientalAndrey MontoyaAún no hay calificaciones
- Desarrollo de Guía22Documento2 páginasDesarrollo de Guía22Andrey MontoyaAún no hay calificaciones
- Parcial Final 1Documento8 páginasParcial Final 1Andrey MontoyaAún no hay calificaciones
- Solución al mezclador de señal con amplificador operacionalDocumento5 páginasSolución al mezclador de señal con amplificador operacionalAndrey MontoyaAún no hay calificaciones
- Fase 3 Electronica AnalogaDocumento5 páginasFase 3 Electronica AnalogaAndrey MontoyaAún no hay calificaciones
- Solución al mezclador de señal con amplificador operacionalDocumento5 páginasSolución al mezclador de señal con amplificador operacionalAndrey MontoyaAún no hay calificaciones
- Etica Empresarial Escenario 4 y 5Documento7 páginasEtica Empresarial Escenario 4 y 5Andrey MontoyaAún no hay calificaciones
- TALLER ESTUDIANTE 5 AlgoritmoDocumento5 páginasTALLER ESTUDIANTE 5 AlgoritmoAndrey MontoyaAún no hay calificaciones
- Etica Empresarial Escenario 4 y 5 Corr.Documento2 páginasEtica Empresarial Escenario 4 y 5 Corr.Andrey MontoyaAún no hay calificaciones
- Desarrollo de Guía1Documento3 páginasDesarrollo de Guía1Andrey MontoyaAún no hay calificaciones
- Evaluacion de Proyectos 2021Documento7 páginasEvaluacion de Proyectos 2021Andrey MontoyaAún no hay calificaciones
- Cultura Ambiental 123Documento4 páginasCultura Ambiental 123Andrey MontoyaAún no hay calificaciones
- Desarrollo de Guía22Documento2 páginasDesarrollo de Guía22Andrey MontoyaAún no hay calificaciones
- Desarrollo de Guía1Documento3 páginasDesarrollo de Guía1Andrey MontoyaAún no hay calificaciones
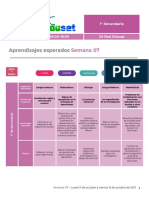
- APRENDE EN CASA PLAN SEMANAL Secundaria Semana 7Documento15 páginasAPRENDE EN CASA PLAN SEMANAL Secundaria Semana 7Laura IslasAún no hay calificaciones
- UNIVERSIDAD AUTONOMA Univ Silvia Rodriguez Practica 3Documento9 páginasUNIVERSIDAD AUTONOMA Univ Silvia Rodriguez Practica 3Belen Rodriguez MarcaAún no hay calificaciones
- Clasificación de Las Matrices y Ejemplos de Las MismaDocumento9 páginasClasificación de Las Matrices y Ejemplos de Las MismaArely RochaAún no hay calificaciones
- Tubo Rectangular de Acero Astm A500Documento1 páginaTubo Rectangular de Acero Astm A500Jhonny CyAún no hay calificaciones
- EX - Adm - UNMSM - Area BDocumento25 páginasEX - Adm - UNMSM - Area BkarenAún no hay calificaciones
- Comportamiento de una lámpara fluorescente con CADocumento27 páginasComportamiento de una lámpara fluorescente con CArosa sabchez pachecoAún no hay calificaciones
- M14. Lectura 1. Yo-Facilitar Un ConflictoDocumento5 páginasM14. Lectura 1. Yo-Facilitar Un Conflictohelenapalacios2011Aún no hay calificaciones
- Sem-04 Analisis Dimensional 3roDocumento4 páginasSem-04 Analisis Dimensional 3rokimtumbajulcasanchezAún no hay calificaciones
- Equi Pasos AnaDocumento7 páginasEqui Pasos AnaBrayan GonzalezAún no hay calificaciones
- Medicina Nuclear - RadioDocumento7 páginasMedicina Nuclear - RadioMiguelAún no hay calificaciones
- Experiencia 3 Onda en La Cuerda Virtual Phet - Fisica - IIDocumento7 páginasExperiencia 3 Onda en La Cuerda Virtual Phet - Fisica - IIJhonatan CAAún no hay calificaciones
- Analisis de Suelo de San Antonio Calicata 01Documento9 páginasAnalisis de Suelo de San Antonio Calicata 01Joseph Ñahui SalinasAún no hay calificaciones
- Esfuerzos y Deformaciones 4 PDFDocumento50 páginasEsfuerzos y Deformaciones 4 PDFMaría Ivette Ignacio DíazAún no hay calificaciones
- Piramide CuadrangularDocumento4 páginasPiramide CuadrangularMelany NayelAún no hay calificaciones
- Ensayo de Torricelli: Determinación experimental de la velocidad de salida de un fluidoDocumento17 páginasEnsayo de Torricelli: Determinación experimental de la velocidad de salida de un fluidoGABRIEL RAMOS HUIÑOCANAAún no hay calificaciones
- Esfuerzo normal, deformación y tensión térmicaDocumento20 páginasEsfuerzo normal, deformación y tensión térmicaGustavo Hernández PérezAún no hay calificaciones
- Preguntas EAES PilotoDocumento78 páginasPreguntas EAES PilotoDiego100% (1)
- Examen Mecanica Vectorial IMA401Documento2 páginasExamen Mecanica Vectorial IMA401Alejandro MataAún no hay calificaciones
- Método científico: observación, hipótesis, experimentación y análisisDocumento3 páginasMétodo científico: observación, hipótesis, experimentación y análisisde_boerAún no hay calificaciones
- Tarea 2 PyE2.0Documento14 páginasTarea 2 PyE2.0Héctor Alexey EscobarAún no hay calificaciones
- Ejercicio de Función Trigonométrica de Parcial Viejo Resuelto. Aula VirtualDocumento4 páginasEjercicio de Función Trigonométrica de Parcial Viejo Resuelto. Aula VirtualMaría Victoria Sierra OrtegaAún no hay calificaciones
- TP2 Conceptos de ProbabilidadDocumento6 páginasTP2 Conceptos de ProbabilidadMaría Eugenia GallardoAún no hay calificaciones
- Estandar de Cimbras 3.5 X 3.8 Viga H6Documento1 páginaEstandar de Cimbras 3.5 X 3.8 Viga H6walter huamaniAún no hay calificaciones
- Filosofia General.Documento14 páginasFilosofia General.joselly.25torresAún no hay calificaciones
- Cálculo Vectorial: Examen Final 2Documento2 páginasCálculo Vectorial: Examen Final 2Aedb3Aún no hay calificaciones
- Parcial 2 EstaticaDocumento4 páginasParcial 2 EstaticajhonatanAún no hay calificaciones
- Actividad FinalDocumento4 páginasActividad FinalBrandon StevenAún no hay calificaciones
- Bancos de TierraDocumento45 páginasBancos de TierraKelvin C.Aún no hay calificaciones
- Mduarman TallerEstudio10%examen PropiedadesMecanicasDocumento14 páginasMduarman TallerEstudio10%examen PropiedadesMecanicasDiego PeñaAún no hay calificaciones
- Propagación Ondas Electromagnéticas Tecnológico MéxicoDocumento7 páginasPropagación Ondas Electromagnéticas Tecnológico MéxicoDjJorge DionicioAún no hay calificaciones