También podría gustarte
- MPE - Espacios Vectoriales Conceptos Básicos - NC PRELIMINAR2 (2020-08)Documento16 páginasMPE - Espacios Vectoriales Conceptos Básicos - NC PRELIMINAR2 (2020-08)Ivan cabrejo millAún no hay calificaciones
- Álgebra moderna en grupos y estructuras algebraicasDocumento6 páginasÁlgebra moderna en grupos y estructuras algebraicasJesús SaurithAún no hay calificaciones
- Espacios VectorialesDocumento29 páginasEspacios VectorialesGiselle RosasAún no hay calificaciones
- Clase 2Documento8 páginasClase 2pampelusi2Aún no hay calificaciones
- Espacio VectorialDocumento23 páginasEspacio VectorialDana SorianoAún no hay calificaciones
- vectores y matricesDocumento25 páginasvectores y matricesFERNANDO TOVAR MEJIAAún no hay calificaciones
- Espacios vectoriales y sus propiedadesDocumento33 páginasEspacios vectoriales y sus propiedadesJuanMa CastilloAún no hay calificaciones
- Espacios y Subespacios VectorialesDocumento28 páginasEspacios y Subespacios VectorialesShirley ZagacetaAún no hay calificaciones
- A8 InjDocumento5 páginasA8 InjIsrael NeriAún no hay calificaciones
- Propiedades de VectoresDocumento2 páginasPropiedades de VectoresName EsteloAún no hay calificaciones
- Mate. Aplic. Sesión 1Documento14 páginasMate. Aplic. Sesión 1juan alejandro ramirez zegarraAún no hay calificaciones
- Form 1 ParcDocumento21 páginasForm 1 ParcJUAN MANUEL GAMBOA GÓMEZAún no hay calificaciones
- 1 3.números Complejos 1Documento9 páginas1 3.números Complejos 1sol florencia loyola duranAún no hay calificaciones
- 1 Sist Sudsy Vector EsDocumento2 páginas1 Sist Sudsy Vector EsAlex SosaAún no hay calificaciones
- Semana 02Documento19 páginasSemana 02YESSENIA ANACELI FERNANDEZ REYESAún no hay calificaciones
- RCV Fi Ts001Documento17 páginasRCV Fi Ts001eljamboardAún no hay calificaciones
- 02 - VectoresDocumento40 páginas02 - VectoresSaúl OrtizAún no hay calificaciones
- Espacios Vectoriales 2024 - 1333710951Documento19 páginasEspacios Vectoriales 2024 - 1333710951MAYARI LEMUS LONEAún no hay calificaciones
- PROPIEDADES DE LOS VECTORESDocumento13 páginasPROPIEDADES DE LOS VECTORESCarolina Choque MamaniAún no hay calificaciones
- CLASE 1 Vectores en R3, Geometría Analítica Espacial V1.Documento9 páginasCLASE 1 Vectores en R3, Geometría Analítica Espacial V1.Santiago Leonardo Marcillo HidalgoAún no hay calificaciones
- Semana - 3 - Subespacio VectorialDocumento17 páginasSemana - 3 - Subespacio VectorialCarlos IntriagoAún no hay calificaciones
- Vectores 6 11 2020 EjerciciosDocumento15 páginasVectores 6 11 2020 EjerciciosYoverlys TaboadaAún no hay calificaciones
- Tema 1Documento106 páginasTema 1Carlos GomezAún no hay calificaciones
- ÁLGEBRA Y GEOMETRÍA II Espacios VectorialesDocumento48 páginasÁLGEBRA Y GEOMETRÍA II Espacios VectorialesFran ParrottaAún no hay calificaciones
- Algebra Vectorial (UTN Pacheco)Documento11 páginasAlgebra Vectorial (UTN Pacheco)Casa GubrielsAún no hay calificaciones
- S01.s1 MaterialDocumento22 páginasS01.s1 MaterialXiomara La TorreAún no hay calificaciones
- Espacios VectorialesDocumento20 páginasEspacios VectorialeslaleAún no hay calificaciones
- S07.s2 - Suma de VectoresDocumento17 páginasS07.s2 - Suma de VectoresAlejandro MoAún no hay calificaciones
- Magnitudes VectorialesDocumento25 páginasMagnitudes VectorialesIvan Ezequiel VargasAún no hay calificaciones
- Álgebra y Geometría Analítica IIIDocumento12 páginasÁlgebra y Geometría Analítica IIITomas Jainen AmeriAún no hay calificaciones
- Teoria de Valores y Vectores PropiosDocumento9 páginasTeoria de Valores y Vectores Propiosfranco bejaranoAún no hay calificaciones
- Semana 2 Geometria AnaliticaDocumento9 páginasSemana 2 Geometria AnaliticaMarioAún no hay calificaciones
- Técnicas de Integración.Documento29 páginasTécnicas de Integración.luanna rojas layzaAún no hay calificaciones
- Matemática III: Combinaciones lineales, bases y dimensionesDocumento37 páginasMatemática III: Combinaciones lineales, bases y dimensiones2pac YupanquiAún no hay calificaciones
- Numeros RealesDocumento11 páginasNumeros Realesalejandro aschAún no hay calificaciones
- Solución Taller Sumativo 3 P117cuvDocumento6 páginasSolución Taller Sumativo 3 P117cuvKevin BajañaAún no hay calificaciones
- 6) Conceptos Básicos de Álgebra LinealDocumento11 páginas6) Conceptos Básicos de Álgebra LinealSalim SaadiAún no hay calificaciones
- Valores y Vectores PropiosDocumento9 páginasValores y Vectores PropiosJose MarsilliAún no hay calificaciones
- Corrección Quinto Punto Parcial SólidosDocumento2 páginasCorrección Quinto Punto Parcial SólidosCarlos Osorno VelásquezAún no hay calificaciones
- Cuaterniones Parte 1Documento5 páginasCuaterniones Parte 1NanDo SjvAún no hay calificaciones
- ParametroDocumento14 páginasParametroTania DueñasAún no hay calificaciones
- FuncEsp_AbsolutoRacionalDocumento23 páginasFuncEsp_AbsolutoRacionalCésar Alonso BernabéAún no hay calificaciones
- Mat 1313 D Cap I (1 Al) - 13-15Documento3 páginasMat 1313 D Cap I (1 Al) - 13-15JHONATANAún no hay calificaciones
- Teoría Carga Multiaxial: Ley de Hooke Generalizada - Problema 2.70 BEER and JOHNSTON 8va EdiciónDocumento7 páginasTeoría Carga Multiaxial: Ley de Hooke Generalizada - Problema 2.70 BEER and JOHNSTON 8va EdiciónAlexandro BravoAún no hay calificaciones
- Semana #05 (Álgebra Lineal) ActualizadaDocumento26 páginasSemana #05 (Álgebra Lineal) ActualizadaGiraldo Moya JosueAún no hay calificaciones
- U.a.4. Calculo IiDocumento10 páginasU.a.4. Calculo IiSofia ReyesAún no hay calificaciones
- Semana VDocumento3 páginasSemana VangelAún no hay calificaciones
- Solución de ecuaciones diferenciales masa-resorteDocumento14 páginasSolución de ecuaciones diferenciales masa-resorteandy melendezAún no hay calificaciones
- Aplicaciones de Las Derivadas 2 PDFDocumento6 páginasAplicaciones de Las Derivadas 2 PDFjhamil jhonAún no hay calificaciones
- Espacios VectorialesDocumento41 páginasEspacios VectorialesYmanol ChavarriaAún no hay calificaciones
- AgustínMartos TareaSemana8Documento7 páginasAgustínMartos TareaSemana8Diego Martinez100% (1)
- Apuntes ResMatDocumento6 páginasApuntes ResMatMartin MespoAún no hay calificaciones
- Trabajo Grupal de Diversos TemasDocumento4 páginasTrabajo Grupal de Diversos TemasJason Robelo HuarancaAún no hay calificaciones
- Trabajo y energía en física generalDocumento45 páginasTrabajo y energía en física generalKerT MCrAún no hay calificaciones
- Mtse U1 A1 MastDocumento7 páginasMtse U1 A1 MastMAURICIOAún no hay calificaciones
- PiterDocumento5 páginasPiterDanielAlexanderChaparroAún no hay calificaciones
- Tema 4 PDFDocumento8 páginasTema 4 PDFDiego EspinosaAún no hay calificaciones
- Derivadas Direccional 2023Documento22 páginasDerivadas Direccional 2023Oscar Crespo100% (1)
- Apmat p2Documento11 páginasApmat p2Ramón Flores RodríguezAún no hay calificaciones
- Transformaciones LinealesDocumento54 páginasTransformaciones Lineales2pac YupanquiAún no hay calificaciones
- Matemática III: Combinaciones lineales, bases y dimensionesDocumento37 páginasMatemática III: Combinaciones lineales, bases y dimensiones2pac YupanquiAún no hay calificaciones
- Ejercicios de Subespacios VectorialesDocumento3 páginasEjercicios de Subespacios Vectoriales2pac YupanquiAún no hay calificaciones
- Ejercicios de Espacios VectorialesDocumento1 páginaEjercicios de Espacios Vectoriales2pac YupanquiAún no hay calificaciones
- TDT ColombiaDocumento926 páginasTDT ColombiaMilena Ramirez EspinosaAún no hay calificaciones
- UNIVERSIDAD ANDINA DEL CUSCODocumento12 páginasUNIVERSIDAD ANDINA DEL CUSCOYHUMY CARRION UTANIAún no hay calificaciones
- Apuntes RRHHDocumento66 páginasApuntes RRHHAitor Corral Gonzalez100% (1)
- Instrumentos de Navegacion 6Documento6 páginasInstrumentos de Navegacion 6Luis PinedaAún no hay calificaciones
- Introducción A La Norma ISO - IEC 12207Documento19 páginasIntroducción A La Norma ISO - IEC 12207Ricardo Calderón CruzAún no hay calificaciones
- Material Montaje Andamios LayersDocumento48 páginasMaterial Montaje Andamios LayersPurita RomaynaAún no hay calificaciones
- Informe Final LogísticaDocumento17 páginasInforme Final LogísticaBolsa de Trabajo PUCPAún no hay calificaciones
- Historia minería Bolivia espacio económico regional proteccionismoDocumento5 páginasHistoria minería Bolivia espacio económico regional proteccionismokarshokerAún no hay calificaciones
- Clasificación y usos de las plantas en el PerúDocumento6 páginasClasificación y usos de las plantas en el Perúroxana cecilia yupanqui egoavilAún no hay calificaciones
- Mantequilla y Mayonesa-ExposiciónDocumento24 páginasMantequilla y Mayonesa-ExposiciónPaola remeAún no hay calificaciones
- Taller 2 EnergíaDocumento7 páginasTaller 2 EnergíaJUAN DIEGO MARTINEZ BENAVIDES ESTUDIANTE ACTIVOAún no hay calificaciones
- Toma de Decisiones Eje 3Documento16 páginasToma de Decisiones Eje 3Angie lorena Torres rodriguezAún no hay calificaciones
- Descodificador UHD Movistar+ - VIP5342Documento2 páginasDescodificador UHD Movistar+ - VIP5342Javier G.RayaAún no hay calificaciones
- EPP ingeniería industrialDocumento4 páginasEPP ingeniería industrialNathalia Sofia Moreno BallivianAún no hay calificaciones
- Cuestionario sobre educación virtual y ambientes de aprendizajeDocumento3 páginasCuestionario sobre educación virtual y ambientes de aprendizajeGina Paola Melendez Arango100% (1)
- The Execution TrapDocumento2 páginasThe Execution TrapIsmael Pérez Montes de OcaAún no hay calificaciones
- Terra GolfDocumento2 páginasTerra GolfJaviera SantisAún no hay calificaciones
- Capacitación Doctrina Cooperativa, Principios y Valores CooperativosDocumento28 páginasCapacitación Doctrina Cooperativa, Principios y Valores CooperativosRoy Fernandez SanchezAún no hay calificaciones
- T8 Consideraciones Teórico-Prácticas en Problemas de Flujo en CanalesDocumento15 páginasT8 Consideraciones Teórico-Prácticas en Problemas de Flujo en CanalesDara PonceAún no hay calificaciones
- Sites GoogleDocumento38 páginasSites GoogleRicardoAún no hay calificaciones
- Carta de No Poseer ViviendaDocumento3 páginasCarta de No Poseer ViviendaAndres SucreAún no hay calificaciones
- 91 1 272 1 10 20170914Documento5 páginas91 1 272 1 10 20170914Carlos CordovaAún no hay calificaciones
- Antologia 1Documento9 páginasAntologia 1Enrique OrtizAún no hay calificaciones
- Informe N 159 de Acta N 222 2020 MCC Acu Sgoptyc Gdu MDPDocumento2 páginasInforme N 159 de Acta N 222 2020 MCC Acu Sgoptyc Gdu MDPMari CondoriAún no hay calificaciones
- PRIMER PARCIAL GR - MIERCOLES-1-4 P.M.Documento2 páginasPRIMER PARCIAL GR - MIERCOLES-1-4 P.M.Camilo LeónAún no hay calificaciones
- InformeDocumento7 páginasInformedara Salcedo vegaAún no hay calificaciones
- Contabilidad SimplificadaDocumento16 páginasContabilidad Simplificadagabriel orantesAún no hay calificaciones
- Norma Eccl 210601020Documento3 páginasNorma Eccl 210601020MariaZerdas50% (2)
- Ensayo de AnaversaDocumento2 páginasEnsayo de AnaversaNorma Torres100% (1)
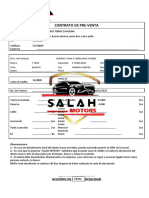
- Contrato de Pre-Venta Definitivo Carlos Guillermo Colque Villca - Lizeth Paihuanca MamaniDocumento2 páginasContrato de Pre-Venta Definitivo Carlos Guillermo Colque Villca - Lizeth Paihuanca MamaniJhonny Cesar Montaño MoralesAún no hay calificaciones