También podría gustarte
- Practica 8 - 1851086Documento7 páginasPractica 8 - 1851086Jose MtzAún no hay calificaciones
- Análisis del lugar de las raíces mediante ScilabDocumento5 páginasAnálisis del lugar de las raíces mediante ScilabDavidSernaAún no hay calificaciones
- Laboratorio N°2 Diseño de Controlador Con LGRDocumento16 páginasLaboratorio N°2 Diseño de Controlador Con LGRnelsonAún no hay calificaciones
- Informe N°3 Lugar Gemetrico de Las Raices UltimoDocumento14 páginasInforme N°3 Lugar Gemetrico de Las Raices UltimoVsm Hns GlsAún no hay calificaciones
- Practica 3 Laboratorio Control2Documento12 páginasPractica 3 Laboratorio Control2ALEJANDRO FIGUEROA HUARACALLOAún no hay calificaciones
- Caccha Lab5Documento16 páginasCaccha Lab5jesus de la cruzAún no hay calificaciones
- Análisis de sistemas LTI mediante el método del lugar geométrico de las raícesDocumento4 páginasAnálisis de sistemas LTI mediante el método del lugar geométrico de las raícesmoisesAún no hay calificaciones
- Lugar de Las RaicesDocumento19 páginasLugar de Las RaicesDaya BallagánAún no hay calificaciones
- LAB. 05 - Lugar Geométrico de Las RaícesDocumento12 páginasLAB. 05 - Lugar Geométrico de Las RaícesLuiz GerardoAún no hay calificaciones
- Practica 8Documento6 páginasPractica 8vianey martinezAún no hay calificaciones
- Practica 9 de ControlDocumento7 páginasPractica 9 de ControlWiliee JuarezAún no hay calificaciones
- Caract Func y LGR-Sistemas de ControlDocumento7 páginasCaract Func y LGR-Sistemas de ControlDieguithop Anchundia100% (1)
- Tarea2 Faber LaguadoDocumento14 páginasTarea2 Faber Laguadofaber orlandoAún no hay calificaciones
- Laboratorio de Ingeniería de Control Práctica N°8 Análisis de Sistemas de Control Por Lugar Geométrico de Las Raices''Documento14 páginasLaboratorio de Ingeniería de Control Práctica N°8 Análisis de Sistemas de Control Por Lugar Geométrico de Las Raices''Angel MorenoAún no hay calificaciones
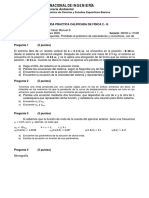
- Sistemas de control: problemas de práctica calificadaDocumento2 páginasSistemas de control: problemas de práctica calificadaRONALD ARAPA YANAAún no hay calificaciones
- Control Analogo Deivi Fase 2Documento19 páginasControl Analogo Deivi Fase 2DEIVI MARIAAún no hay calificaciones
- Practica 9 Ing de ControlDocumento9 páginasPractica 9 Ing de ControlRamirez RubenAún no hay calificaciones
- Práctica 9Documento5 páginasPráctica 9Pedro Rivera0% (1)
- Carrizales LAB5Documento14 páginasCarrizales LAB5jesus de la cruzAún no hay calificaciones
- D4 SCA Bode LGR ESTABILIDAD 23BDocumento4 páginasD4 SCA Bode LGR ESTABILIDAD 23Bsauldanny17Aún no hay calificaciones
- Unidad de Aprendizaje: Laboratorio Control ModernoDocumento10 páginasUnidad de Aprendizaje: Laboratorio Control ModernoIvan AñorveAún no hay calificaciones
- LaboratorioDocumento18 páginasLaboratoriojarlinAún no hay calificaciones
- Análisis LGR y diseño compensador sistemaDocumento9 páginasAnálisis LGR y diseño compensador sistemarobert santiago collazos bonillaAún no hay calificaciones
- TallerDocumento6 páginasTallerJESSIKA PAOLA COELLO CASAAún no hay calificaciones
- Análisis LGR y diseño compensador control analógicoDocumento17 páginasAnálisis LGR y diseño compensador control analógicooswaldo noe martinez araujoAún no hay calificaciones
- Practica 5 Labo Teoria de ControlDocumento17 páginasPractica 5 Labo Teoria de ControlMiguel Guerrero100% (1)
- Bitacora2 Laboratorio Control Balancin Motor HeliceDocumento16 páginasBitacora2 Laboratorio Control Balancin Motor HelicePuig123Aún no hay calificaciones
- Practica 3 Mat 1105Documento2 páginasPractica 3 Mat 1105Cesar Ronald Colque MendizabalAún no hay calificaciones
- Practica 08 - Analisis de Sistemas de Control Por Lugar Geometrico de Las Raices PDFDocumento8 páginasPractica 08 - Analisis de Sistemas de Control Por Lugar Geometrico de Las Raices PDFa1fonso27Aún no hay calificaciones
- TALLER Sistemas DigitalesDocumento4 páginasTALLER Sistemas DigitalesDiego Ezequiel Noguera PazAún no hay calificaciones
- Análisis de ejemplos de controladores PIDDocumento9 páginasAnálisis de ejemplos de controladores PIDJesusVilcaYepezAún no hay calificaciones
- Raices Ecuaciones-Métodos Cerrados P3Documento31 páginasRaices Ecuaciones-Métodos Cerrados P3SCAún no hay calificaciones
- ProyectoDocumento14 páginasProyectoFrancisco LoyolaAún no hay calificaciones
- Diseño de compensador en adelanto para estabilizar sistema y mejorar característicasDocumento17 páginasDiseño de compensador en adelanto para estabilizar sistema y mejorar característicasAndres MoraAún no hay calificaciones
- Ejercicio Unidad 1 y 2 (Complementario)Documento6 páginasEjercicio Unidad 1 y 2 (Complementario)matoto21Aún no hay calificaciones
- P3 EnunciadoDocumento6 páginasP3 EnunciadoAngela MartínAún no hay calificaciones
- Aporte 2 Fase 2 C.ADocumento16 páginasAporte 2 Fase 2 C.AWilmer SosaAún no hay calificaciones
- Grupo 2 - Semana 10Documento51 páginasGrupo 2 - Semana 10Godo SánchezAún no hay calificaciones
- Ejercitario N°1-1Documento3 páginasEjercitario N°1-1YImmy OjedaAún no hay calificaciones
- Guia de Ejercicios 6 - LGR - Ing. SalazarDocumento4 páginasGuia de Ejercicios 6 - LGR - Ing. Salazaredgar cardenasAún no hay calificaciones
- Taller de Filtros Sallen Key - ButterWorth y ChevyshebDocumento24 páginasTaller de Filtros Sallen Key - ButterWorth y ChevyshebJuan Sebastian Cely CaroAún no hay calificaciones
- Taller 2Documento4 páginasTaller 2Jose Miguel Castellanos TrujilloAún no hay calificaciones
- P9 IngCtrlDocumento18 páginasP9 IngCtrlDiablo RgAún no hay calificaciones
- Lugar Geometrico de Las RaicesDocumento15 páginasLugar Geometrico de Las RaicesCristian Arce RomeroAún no hay calificaciones
- Reporte P2Documento11 páginasReporte P2Mafer OzunaAún no hay calificaciones
- Practica 7. Transformador y Su EficienciaDocumento9 páginasPractica 7. Transformador y Su EficienciaLeonardo Garcia100% (1)
- Práctica 9 MatlabDocumento4 páginasPráctica 9 MatlabPedro RiveraAún no hay calificaciones
- Informe Previo 3Documento12 páginasInforme Previo 3Renzo PomaAún no hay calificaciones
- Tarea 1 Grupo 201424 7Documento25 páginasTarea 1 Grupo 201424 7james reinosoAún no hay calificaciones
- Tarea - 2 - Grupo 3 - ColaborativoDocumento28 páginasTarea - 2 - Grupo 3 - Colaborativofredy pertuz100% (1)
- Practica Calificada 2 GDocumento1 páginaPractica Calificada 2 GCristian castro100% (1)
- Modelos de sistemas Mecatrónicos 2016_1Documento4 páginasModelos de sistemas Mecatrónicos 2016_1cristhian munevarAún no hay calificaciones
- Solución problemas ingeniería química ExcelDocumento13 páginasSolución problemas ingeniería química Excelve_asAún no hay calificaciones
- Tarea 1 - Omar GomezDocumento9 páginasTarea 1 - Omar GomezOmar GomezAún no hay calificaciones
- Tarea 6 Respuesta en FrecuenciaDocumento4 páginasTarea 6 Respuesta en FrecuenciaSanty Marchulo VenegasAún no hay calificaciones
- Reporte P4Documento10 páginasReporte P4Mafer OzunaAún no hay calificaciones
- Diseño de compensador atraso-adelanto por lugar de raícesDocumento12 páginasDiseño de compensador atraso-adelanto por lugar de raícesMafer OzunaAún no hay calificaciones
- Reporte P2Documento11 páginasReporte P2Mafer OzunaAún no hay calificaciones
- Reporte P1Documento6 páginasReporte P1Mafer OzunaAún no hay calificaciones
- Ids 217 1898912 P3Documento12 páginasIds 217 1898912 P3Mafer OzunaAún no hay calificaciones
- Ids 217 1898912 P1Documento8 páginasIds 217 1898912 P1Mafer OzunaAún no hay calificaciones
- Ids 217 1898912 P2Documento8 páginasIds 217 1898912 P2Mafer OzunaAún no hay calificaciones
- Manual de Mecanica Renault 4 PDFDocumento49 páginasManual de Mecanica Renault 4 PDFcarlos arturo cardona cañaveral100% (1)
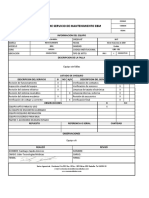
- AA-LT2-RD-QUA-FT-014 RV 0Documento1 páginaAA-LT2-RD-QUA-FT-014 RV 0juanitoAún no hay calificaciones
- Sistema binario paradiclorobenceno-naftalenoDocumento71 páginasSistema binario paradiclorobenceno-naftalenoMalu AisneAún no hay calificaciones
- Funciones o Propósitos de Los Refuerzos Estructura de Concreto ArmadoDocumento6 páginasFunciones o Propósitos de Los Refuerzos Estructura de Concreto Armadol FernandoAún no hay calificaciones
- Ecuacion Diferencial de La Consolidacion UnidimensionalDocumento5 páginasEcuacion Diferencial de La Consolidacion UnidimensionalJuan ParraAún no hay calificaciones
- Técnicas de moleteado: deformación vs corteDocumento50 páginasTécnicas de moleteado: deformación vs corteramonAún no hay calificaciones
- Como Usar MoodleDocumento22 páginasComo Usar MoodleMarco CaporalAún no hay calificaciones
- Tema3.8. P' Orticos Funiculares y RígidosDocumento34 páginasTema3.8. P' Orticos Funiculares y RígidosLeandro Rame ValenciaAún no hay calificaciones
- Concreto UapDocumento19 páginasConcreto UapjoseAún no hay calificaciones
- Informe Laboratorio Transferencia de Energia CaloricaDocumento7 páginasInforme Laboratorio Transferencia de Energia CaloricaDidier Ortiz InocencioAún no hay calificaciones
- Circuito en Serie y en Paralelo MISCELANEADocumento8 páginasCircuito en Serie y en Paralelo MISCELANEADeyssi Ivetth Arias DurandAún no hay calificaciones
- Corte Por Chorro de AguaDocumento34 páginasCorte Por Chorro de AguaVictoria MorilloAún no hay calificaciones
- Reacciones de PrecipitaciónDocumento3 páginasReacciones de PrecipitaciónLuisArizaYepezAún no hay calificaciones
- Adquisicion de Datos Con LabviewDocumento18 páginasAdquisicion de Datos Con LabviewHomer TpAún no hay calificaciones
- Banco de Preguntas de Inyección Electrónica 1Documento10 páginasBanco de Preguntas de Inyección Electrónica 1Wilson Fernando Yaselga Auz100% (1)
- MS ProjectDocumento24 páginasMS ProjectCristianMolinaOreAún no hay calificaciones
- Crucigrama AmbientalDocumento3 páginasCrucigrama AmbientalAlb CruzAún no hay calificaciones
- Cementacion ForzadaDocumento4 páginasCementacion ForzadaCristian Melendres OrellanaAún no hay calificaciones
- TDR Monitores Ugel Jaen - Marzo Abril 2018Documento58 páginasTDR Monitores Ugel Jaen - Marzo Abril 2018deniaAún no hay calificaciones
- Practica#1 Met-1100 A-BDocumento3 páginasPractica#1 Met-1100 A-BAdrian Vargas PumaAún no hay calificaciones
- Aplicaciones de La Topografía A La ConstrucciónDocumento6 páginasAplicaciones de La Topografía A La ConstrucciónKeylaSánchezLacernaAún no hay calificaciones
- U07 Entrepisos LOSASDocumento14 páginasU07 Entrepisos LOSASYayo VeraAún no hay calificaciones
- Los Mejores 2012 IDocumento40 páginasLos Mejores 2012 IPablo LabradoAún no hay calificaciones
- Comandos básicos para la consola de WindowsDocumento2 páginasComandos básicos para la consola de WindowswilliamAún no hay calificaciones
- QBD-031 - P - Pesa Gramera - 02-12-19 - OT-1928Documento1 páginaQBD-031 - P - Pesa Gramera - 02-12-19 - OT-1928santiagoAún no hay calificaciones
- Memoria DescriptivaDocumento9 páginasMemoria DescriptivaRosman Yober Ibañez GutierrezAún no hay calificaciones
- Cartas Ing. DBRDocumento32 páginasCartas Ing. DBRJose Santos Gonzales MuñozAún no hay calificaciones
- Cálculo de resistencia y voltaje en circuitos eléctricos en serie y paraleloDocumento10 páginasCálculo de resistencia y voltaje en circuitos eléctricos en serie y paraleloMiranda LomeliAún no hay calificaciones
- Comparativa de ProductosDocumento3 páginasComparativa de ProductoscarlosAún no hay calificaciones
- Diseño de Pavimentos Rigidos FibroreforzadosDocumento92 páginasDiseño de Pavimentos Rigidos FibroreforzadosRenato Farje Parrilla100% (1)
- Modelado y simulación de sistemas naturalesDe EverandModelado y simulación de sistemas naturalesAún no hay calificaciones
- Introducción a la estadística matemáticaDe EverandIntroducción a la estadística matemáticaCalificación: 5 de 5 estrellas5/5 (2)
- Inteligencia artificial: Lo que usted necesita saber sobre el aprendizaje automático, robótica, aprendizaje profundo, Internet de las cosas, redes neuronales, y nuestro futuroDe EverandInteligencia artificial: Lo que usted necesita saber sobre el aprendizaje automático, robótica, aprendizaje profundo, Internet de las cosas, redes neuronales, y nuestro futuroCalificación: 4 de 5 estrellas4/5 (1)
- Manual práctico de investigación de operaciones I. 4edDe EverandManual práctico de investigación de operaciones I. 4edCalificación: 2.5 de 5 estrellas2.5/5 (3)
- Diseño y construcción de algoritmosDe EverandDiseño y construcción de algoritmosCalificación: 4 de 5 estrellas4/5 (6)
- Control automático aplicado: Prácticas de laboratorio 2da. EdiciónDe EverandControl automático aplicado: Prácticas de laboratorio 2da. EdiciónCalificación: 3.5 de 5 estrellas3.5/5 (5)
- UF1125 - Técnicas de programación en fabricación mecánicaDe EverandUF1125 - Técnicas de programación en fabricación mecánicaAún no hay calificaciones
- Métodos Matriciales para ingenieros con MATLABDe EverandMétodos Matriciales para ingenieros con MATLABCalificación: 5 de 5 estrellas5/5 (1)
- Manual de estadística no paramétrica aplicada a los negociosDe EverandManual de estadística no paramétrica aplicada a los negociosAún no hay calificaciones
- Análisis y diseño de algoritmos: Un enfoque prácticoDe EverandAnálisis y diseño de algoritmos: Un enfoque prácticoAún no hay calificaciones
- Introducción al modelamiento y simulación en Ingeniería Química.De EverandIntroducción al modelamiento y simulación en Ingeniería Química.Aún no hay calificaciones
- Fundamentos de econometría intermedia: Teoría y aplicacionesDe EverandFundamentos de econometría intermedia: Teoría y aplicacionesAún no hay calificaciones
- Resumen de Inteligencia artificial de Pablo RodríguezDe EverandResumen de Inteligencia artificial de Pablo RodríguezCalificación: 3 de 5 estrellas3/5 (1)
- Una aproximación práctica a las redes neuronales artificialesDe EverandUna aproximación práctica a las redes neuronales artificialesAún no hay calificaciones
- Aplicación de procesamiento cuántico de señales en la teoría waveletDe EverandAplicación de procesamiento cuántico de señales en la teoría waveletCalificación: 3 de 5 estrellas3/5 (1)
- Nuevos estudios de teoría de la optimidad:: Sintaxis, estudios fónicos y lingüística computacionalDe EverandNuevos estudios de teoría de la optimidad:: Sintaxis, estudios fónicos y lingüística computacionalAún no hay calificaciones
- Criptografía sin secretos con Python: Spyware/Programa espíaDe EverandCriptografía sin secretos con Python: Spyware/Programa espíaCalificación: 5 de 5 estrellas5/5 (4)
- Interpreting quantum mechanics: a historical approachDe EverandInterpreting quantum mechanics: a historical approachAún no hay calificaciones
- Teoría Del Gas Real: La Relación Exacta Para Gases RealesDe EverandTeoría Del Gas Real: La Relación Exacta Para Gases RealesAún no hay calificaciones
- Sistemas de Bose: Grandes desvíos y hamiltonianos aproximativosDe EverandSistemas de Bose: Grandes desvíos y hamiltonianos aproximativosCalificación: 2 de 5 estrellas2/5 (1)