También podría gustarte
- Tarea4-Metodologías de Diseño Según Basadas en El Espacio de Estados.-Luis Andres Ramos - Grupo 203040-18Documento10 páginasTarea4-Metodologías de Diseño Según Basadas en El Espacio de Estados.-Luis Andres Ramos - Grupo 203040-18luis andres ramos100% (1)
- Análisis estructural mediante el método de los elementos finitos. Introducción al comportamiento lineal elásticoDe EverandAnálisis estructural mediante el método de los elementos finitos. Introducción al comportamiento lineal elásticoCalificación: 4.5 de 5 estrellas4.5/5 (12)
- Sistemas de puesta a tierra: Diseñado con IEEE-80 y evaluado con MEFDe EverandSistemas de puesta a tierra: Diseñado con IEEE-80 y evaluado con MEFCalificación: 4.5 de 5 estrellas4.5/5 (7)
- Informe Tarea 6Documento10 páginasInforme Tarea 6Gloria SolarteAún no hay calificaciones
- Análisis Modal Espectral Pórtico PlanoDocumento18 páginasAnálisis Modal Espectral Pórtico PlanoRUBEN FELIPE GOMEZ BAUTISTAAún no hay calificaciones
- Oscilaciones AmortiguadasDocumento10 páginasOscilaciones AmortiguadasJuan Carlos RochaAún no hay calificaciones
- Análisis Modal Espectral en Estructuras Con Aisladores ElastoméricosDocumento25 páginasAnálisis Modal Espectral en Estructuras Con Aisladores ElastoméricosJenniffer SalazarAún no hay calificaciones
- Laboratorio 2Documento2 páginasLaboratorio 2Esteban UrueñaAún no hay calificaciones
- Ejemplo Señales BayesianoDocumento6 páginasEjemplo Señales BayesianoTito V. CruzAún no hay calificaciones
- Informe de Dinamica #2Documento10 páginasInforme de Dinamica #2Jorge Antonio GonzálezAún no hay calificaciones
- Shaking v5Documento17 páginasShaking v5Javier Moreno RamirezAún no hay calificaciones
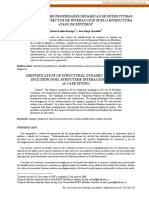
- Identificación de Propiedades Dinámicas de Estructuras Considerando Efectos de Interacción Suelo-Estructura (Caso de Estudio)Documento16 páginasIdentificación de Propiedades Dinámicas de Estructuras Considerando Efectos de Interacción Suelo-Estructura (Caso de Estudio)Gary LoorAún no hay calificaciones
- Estimacion de Perdidas Sismicas Mediante Curvas de FragilidadDocumento11 páginasEstimacion de Perdidas Sismicas Mediante Curvas de FragilidadJonathan AveigaAún no hay calificaciones
- Memorias AranjuezDocumento114 páginasMemorias AranjuezNicolas Alberto Vasquez FrancoAún no hay calificaciones
- Laboratorio 4 - Dinámica AplicadaDocumento13 páginasLaboratorio 4 - Dinámica AplicadaJesus CastilloAún no hay calificaciones
- GRUPALDocumento35 páginasGRUPALAdriana AnteAún no hay calificaciones
- Memoria Descriptiva EstructurasDocumento23 páginasMemoria Descriptiva EstructurasRoberto Castro CoronadoAún no hay calificaciones
- Metodologia para El Diseno de Un Iman Resistivo PaDocumento6 páginasMetodologia para El Diseno de Un Iman Resistivo PaYadira PalateAún no hay calificaciones
- Disipadores Histereticos de Energia Sism 2 PDFDocumento16 páginasDisipadores Histereticos de Energia Sism 2 PDFGuido MolinaAún no hay calificaciones
- Informe AntisismicaDocumento16 páginasInforme AntisismicaCamila Fernanda Toledo BustamanteAún no hay calificaciones
- Práctica 2 deDocumento2 páginasPráctica 2 deClaudia TrujilloAún no hay calificaciones
- Análisis dinámico modal espectral de edificio según NTE E.030Documento31 páginasAnálisis dinámico modal espectral de edificio según NTE E.030Renato Angulo EncinasAún no hay calificaciones
- Familias Lógicas para El DiseñoDocumento3 páginasFamilias Lógicas para El DiseñoJose Manuel Mas NahAún no hay calificaciones
- Lab Control 1Documento4 páginasLab Control 1Jhon Fernando MolinaAún no hay calificaciones
- Análisis de estructuras con SAP2000Documento44 páginasAnálisis de estructuras con SAP2000Ligia HinojosaAún no hay calificaciones
- Memoria de Cálculo Taller IntegradorDocumento7 páginasMemoria de Cálculo Taller IntegradorDlutkx ZeqAún no hay calificaciones
- Caracterizacion Sensor CapacitivoDocumento4 páginasCaracterizacion Sensor Capacitivo123455555555Aún no hay calificaciones
- 16 Evaluacion Integral de Atributos Sismicos 3DDocumento9 páginas16 Evaluacion Integral de Atributos Sismicos 3DMarvick RuizAún no hay calificaciones
- 2 RACyTDocumento13 páginas2 RACyTroyal1979Aún no hay calificaciones
- Laboratorio Vibración Libre de Un Sistema Masa ResorteDocumento3 páginasLaboratorio Vibración Libre de Un Sistema Masa ResorteJorge CastilloAún no hay calificaciones
- Técnicas experimentales para caracterizar la respuesta dinámica de sistemas de un grado de libertadDocumento6 páginasTécnicas experimentales para caracterizar la respuesta dinámica de sistemas de un grado de libertadRenzo MejiaAún no hay calificaciones
- Compresión en PolímerosDocumento12 páginasCompresión en PolímerosJorgeAún no hay calificaciones
- Informe Abril SignedDocumento7 páginasInforme Abril SignedJonathan ProcelAún no hay calificaciones
- Articulo-Cristhian Montiel - Ayala - FINALDocumento24 páginasArticulo-Cristhian Montiel - Ayala - FINALGAyalaMAún no hay calificaciones
- EXPOSICIONDocumento9 páginasEXPOSICIONgianmarcoAún no hay calificaciones
- Laboratorio1 Compensadores Grupo5Documento18 páginasLaboratorio1 Compensadores Grupo5Juan R. BautistaAún no hay calificaciones
- LEY DE HOOKE EN MATERIALES ELÁSTICOS (Autoguardado)Documento8 páginasLEY DE HOOKE EN MATERIALES ELÁSTICOS (Autoguardado)Varón JohanAún no hay calificaciones
- Poster RoboticaDocumento2 páginasPoster RoboticaElizabethAún no hay calificaciones
- Taller 2 DinámicaDocumento7 páginasTaller 2 DinámicaErik BellerAún no hay calificaciones
- Asignación #2 (Brito, Linares, Spossito)Documento6 páginasAsignación #2 (Brito, Linares, Spossito)Rawson LinaresAún no hay calificaciones
- 03-15-Interaccion Suelo Estructura Omar-Franco-CamiloDocumento10 páginas03-15-Interaccion Suelo Estructura Omar-Franco-CamiloJOSE LUIS GONZALEZAún no hay calificaciones
- Trabajo Práctico Universitario: Efectos Dinámicos en Materiales de Uso AeroespacialDocumento19 páginasTrabajo Práctico Universitario: Efectos Dinámicos en Materiales de Uso AeroespacialarocenasofiaAún no hay calificaciones
- Vibraciones Mecanicas PracticaDocumento7 páginasVibraciones Mecanicas PracticaSteven LucarioAún no hay calificaciones
- Metodología para La Generación de Acelerogramas SintéticosDocumento9 páginasMetodología para La Generación de Acelerogramas SintéticosHenry HoyosAún no hay calificaciones
- Diseño y construcción de un módulo para la excitación dinámica y análisis vibracional de estructurasDocumento6 páginasDiseño y construcción de un módulo para la excitación dinámica y análisis vibracional de estructurasAlonso Cambronero EspinozaAún no hay calificaciones
- TMVF2 deDocumento103 páginasTMVF2 deElvis S. YanquiAún no hay calificaciones
- Informe Academico 3 Grupo 3 M.rigidez PorticosDocumento17 páginasInforme Academico 3 Grupo 3 M.rigidez PorticosFrans Romero CernaAún no hay calificaciones
- 2023-03-29 - MSB - Parcial2Documento12 páginas2023-03-29 - MSB - Parcial2Juan David AcevedoAún no hay calificaciones
- "Vector de Posición": Instituto Politécnico NacionalDocumento9 páginas"Vector de Posición": Instituto Politécnico NacionalSantiago ShAún no hay calificaciones
- Lab 7 Sistemas de ControlDocumento3 páginasLab 7 Sistemas de ControlfranklinAún no hay calificaciones
- Taller 3 - G3Documento4 páginasTaller 3 - G3juan esteban bermudezcamachoAún no hay calificaciones
- Metodos Experimentales1Documento12 páginasMetodos Experimentales1Angel Quintana ChávezAún no hay calificaciones
- Taller MecanismosDocumento3 páginasTaller MecanismosXavier GuillenAún no hay calificaciones
- Finales SismosDocumento24 páginasFinales SismosAldair Cordova HuamaniAún no hay calificaciones
- Informe MayoDocumento9 páginasInforme MayoJonathan ProcelAún no hay calificaciones
- Trabajo Modelado-Analisis 2023Documento6 páginasTrabajo Modelado-Analisis 2023Omar FrancoAún no hay calificaciones
- Sec - Ea-T3-C - Adicionales - Completos - t3 - 0910a-5211 Resueltos de Sistemas de ControlDocumento28 páginasSec - Ea-T3-C - Adicionales - Completos - t3 - 0910a-5211 Resueltos de Sistemas de ControlFabian OrtuzarAún no hay calificaciones
- Distribución de Esfuerzos en Phase2Documento21 páginasDistribución de Esfuerzos en Phase2eddymagueAún no hay calificaciones
- Fisiología del EjercicioDocumento13 páginasFisiología del EjercicioElmer DelgadoAún no hay calificaciones
- A 601 - Muebles TípicosDocumento1 páginaA 601 - Muebles TípicosDiana Patricia ArenasAún no hay calificaciones
- Aleta de PuenteDocumento19 páginasAleta de Puentevillena_cruzadoAún no hay calificaciones
- Nomenclatura Inorganica PDFDocumento8 páginasNomenclatura Inorganica PDFMarvin MachadoAún no hay calificaciones
- Arqueología desafía fecha IslandiaDocumento15 páginasArqueología desafía fecha IslandiaJosan CalderonAún no hay calificaciones
- Laboratorio de CriminologíaDocumento23 páginasLaboratorio de CriminologíaJORGE ANTONIO MARINA LOPEZAún no hay calificaciones
- PC3 Fund. Física - Material de PracticaDocumento17 páginasPC3 Fund. Física - Material de PracticaLeonardo CastilloAún no hay calificaciones
- Protocolo Final Análisis Del Conocimiento de Los Riesgos Del Vapeo en Adultos Jóvenes de 20 A 24 AñosDocumento13 páginasProtocolo Final Análisis Del Conocimiento de Los Riesgos Del Vapeo en Adultos Jóvenes de 20 A 24 Años21030642Aún no hay calificaciones
- Analisis de Datos de VehiculosDocumento7 páginasAnalisis de Datos de VehiculosDiana Mendieta RojasAún no hay calificaciones
- Filtro BiologicoDocumento14 páginasFiltro BiologicoDavid TitoAún no hay calificaciones
- 3 Historia 24 02 2022Documento8 páginas3 Historia 24 02 2022AmayaAún no hay calificaciones
- PETS 01 Calibración de Equipos de Medición - V01Documento5 páginasPETS 01 Calibración de Equipos de Medición - V01martinezjohan83Aún no hay calificaciones
- Guia de CuartoDocumento5 páginasGuia de CuartoDairy Chaparro VillamizarAún no hay calificaciones
- Compuertas LogicasDocumento10 páginasCompuertas LogicasSantiago BustamanteAún no hay calificaciones
- Equipos de LaboratorioDocumento24 páginasEquipos de Laboratoriofernando abraham berrospi casano100% (1)
- Capitulo 9 - Estructura y Diseño OrganizacionalDocumento82 páginasCapitulo 9 - Estructura y Diseño OrganizacionalMed2021 1.6Aún no hay calificaciones
- Flujo Continuo SMEDDocumento16 páginasFlujo Continuo SMEDsebastián droguettAún no hay calificaciones
- BIOLOGÍADocumento41 páginasBIOLOGÍAroyer salazar rodriguezAún no hay calificaciones
- 1er Año Ciencias IiibDocumento162 páginas1er Año Ciencias IiibPaulo Cesar RLunaAún no hay calificaciones
- MatricesDocumento2 páginasMatricesSofia0% (1)
- Anexo 1 - Ejercicios A Resolver Tarea 1Documento9 páginasAnexo 1 - Ejercicios A Resolver Tarea 1Dany Edwar Solarte0% (1)
- Actividad 19 Analisis DofaDocumento10 páginasActividad 19 Analisis DofaLeydyGranadaAún no hay calificaciones
- TUC Politica Educativa No. 2Documento3 páginasTUC Politica Educativa No. 2Victor Salas LoiraAún no hay calificaciones
- Pedt - MonguiDocumento175 páginasPedt - MonguiMilton SaenzAún no hay calificaciones
- 2.2. Teorías Cognoscitivas y Constructivistas Del AprendizajeDocumento15 páginas2.2. Teorías Cognoscitivas y Constructivistas Del Aprendizajenoeliaa.ma.paAún no hay calificaciones
- Historia de Las ArmasDocumento8 páginasHistoria de Las ArmasNatalia NuñezAún no hay calificaciones
- Lectoescritura Mayuscula A MinusculaDocumento21 páginasLectoescritura Mayuscula A MinusculaYenifer GSAún no hay calificaciones
- Sistema de evaluación de estudiantes de Institución Educativa Técnica Agropecuaria de El VesubioDocumento59 páginasSistema de evaluación de estudiantes de Institución Educativa Técnica Agropecuaria de El Vesubiocarlos antonio erazo felizzolaAún no hay calificaciones
- GUÍA DE APRENDIZAJE #1 5° Básico TECNOLOGÍADocumento3 páginasGUÍA DE APRENDIZAJE #1 5° Básico TECNOLOGÍACuchita Vera HernándezAún no hay calificaciones
- CTM1091-GRMN Roger Bendezu de La Cruz - GPS Oregon 550Documento3 páginasCTM1091-GRMN Roger Bendezu de La Cruz - GPS Oregon 550Roger Bendezu Dela CruzAún no hay calificaciones