También podría gustarte
- DcartDocumento9 páginasDcartKenny Torres LunaAún no hay calificaciones
- Artículo NavegaciónDocumento13 páginasArtículo NavegaciónCarlos FuentesAún no hay calificaciones
- Informe Final Proyecto MecatronicoDocumento11 páginasInforme Final Proyecto MecatronicoMartin08D0% (1)
- Sensor Ultrasónico Rotativo para El Levantamiento de Entornos Utilizando La Técnica de Tiempo de Vuelo (T of F)Documento6 páginasSensor Ultrasónico Rotativo para El Levantamiento de Entornos Utilizando La Técnica de Tiempo de Vuelo (T of F)David ChisaguanoAún no hay calificaciones
- Informe Proyecto Integrador 2020Documento8 páginasInforme Proyecto Integrador 2020Diego RoaAún no hay calificaciones
- Sistemas Roboticos TeleoperadosDocumento8 páginasSistemas Roboticos TeleoperadosjapeleAún no hay calificaciones
- Articulo-ALGORITMO SLAMDocumento9 páginasArticulo-ALGORITMO SLAMJacob Avila CamachoAún no hay calificaciones
- RoboticaDocumento10 páginasRoboticaThalia VanegasAún no hay calificaciones
- ServomecanismosDocumento30 páginasServomecanismosGerman Ortiz MonroyAún no hay calificaciones
- Robot Trepador Controlado Via Radio MediDocumento3 páginasRobot Trepador Controlado Via Radio MediLuis G. MendozaAún no hay calificaciones
- Xy - W Vicerversa - Robot - Maci - FinDocumento9 páginasXy - W Vicerversa - Robot - Maci - FinErick OrralaAún no hay calificaciones
- 647-Texto Del Artículo-2865-1-10-20200713Documento10 páginas647-Texto Del Artículo-2865-1-10-20200713José Alejandro Fajardo RodríguezAún no hay calificaciones
- Clasificación de Los RobotsDocumento5 páginasClasificación de Los RobotsRosa MoralesAún no hay calificaciones
- Informe RoboticaDocumento3 páginasInforme RoboticaAndres DonadoAún no hay calificaciones
- Maqmin 21 14 Robótica en MineríaDocumento12 páginasMaqmin 21 14 Robótica en MineríaJhonatan Franz Jurado TravezañoAún no hay calificaciones
- Diseño de Un Controlador Fuzzy para Guiado de Un Robot MóvilDocumento7 páginasDiseño de Un Controlador Fuzzy para Guiado de Un Robot MóvilDavid OcampoAún no hay calificaciones
- Segunda Generación de La RobóticaDocumento5 páginasSegunda Generación de La Robóticadiana dazaAún no hay calificaciones
- Robot DeltaDocumento10 páginasRobot Deltainge5lf5scAún no hay calificaciones
- RobotLab - Guía Didáctica. Plataforma para El Aprendizaje de La Robótica. Educación SecundariaDocumento4 páginasRobotLab - Guía Didáctica. Plataforma para El Aprendizaje de La Robótica. Educación Secundariaafi_guzman3909Aún no hay calificaciones
- LAB 3.3 - Proyecto FinalDocumento9 páginasLAB 3.3 - Proyecto FinalAlejo AngaritaAún no hay calificaciones
- Robot Cartesiano IndustrialDocumento4 páginasRobot Cartesiano IndustrialIsabelle MeléndezAún no hay calificaciones
- Diseño e Implementación de Un Robot Móvil Autónomo Aplicando Redes Neuronales ArtificialesDocumento11 páginasDiseño e Implementación de Un Robot Móvil Autónomo Aplicando Redes Neuronales ArtificialesRenato100% (1)
- Tipos de RobotDocumento14 páginasTipos de RobotHera LuceroAún no hay calificaciones
- TesisDocumento23 páginasTesisAlbertoMendezAún no hay calificaciones
- ARTÍCULODocumento10 páginasARTÍCULOmaria camila velandia garciaAún no hay calificaciones
- Planning and Implementation of Paths in A Robot Delta 2017Documento11 páginasPlanning and Implementation of Paths in A Robot Delta 2017Mario GonzalezAún no hay calificaciones
- Fundamentos LIDARDocumento16 páginasFundamentos LIDARCesar Ivan Ramirez LomeliAún no hay calificaciones
- Desarrollo de Un Robot Móvil Con Brazo Robotica para La Gestion de Desastres Naturales - EF - Robotica IDocumento5 páginasDesarrollo de Un Robot Móvil Con Brazo Robotica para La Gestion de Desastres Naturales - EF - Robotica IPrimus 2018Aún no hay calificaciones
- PDF Taller de Tecnologia Grado 10 DDDocumento3 páginasPDF Taller de Tecnologia Grado 10 DDRafael Castañeda duqueAún no hay calificaciones
- Estructura General de Un RobotDocumento2 páginasEstructura General de Un RobotLuis francisco Carrasco ataramaAún no hay calificaciones
- Correciones Propuesta de GradoDocumento13 páginasCorreciones Propuesta de GradoDaniel VargasAún no hay calificaciones
- Clasificación Del Brazo RobóticoDocumento7 páginasClasificación Del Brazo RobóticoLenin Ismael Quizhpe CórdovaAún no hay calificaciones
- Proyecto FinalDocumento11 páginasProyecto FinalSANTILLAN OBIAGA FRED SHARPAún no hay calificaciones
- Tesis V30Marzo2022Documento13 páginasTesis V30Marzo2022Jahir RodríguezAún no hay calificaciones
- Robotica BasicaDocumento37 páginasRobotica BasicaAna Gabriela Rojas ReasAún no hay calificaciones
- Tarea 8 Clasificacion de Robots Carlos HiramDocumento4 páginasTarea 8 Clasificacion de Robots Carlos HiramCARLOS HIRAM ESTEVEZ CASTROAún no hay calificaciones
- Guia Robotica 1Documento3 páginasGuia Robotica 1johnK2010Aún no hay calificaciones
- Etn - 1022 (Mamani Gutierrez, Freddy) - Brazo RoboticoDocumento10 páginasEtn - 1022 (Mamani Gutierrez, Freddy) - Brazo RoboticoFreddyGutierrezAún no hay calificaciones
- 0 - Rotótica Actividad DiagnoticaDocumento4 páginas0 - Rotótica Actividad DiagnoticaHugo GFAún no hay calificaciones
- Control de Una Articulación de La ManoDocumento16 páginasControl de Una Articulación de La ManoSergio RosalesAún no hay calificaciones
- Parte A)Documento4 páginasParte A)Franklin F. Fernandez G.Aún no hay calificaciones
- Reporte Robot LaberintoDocumento14 páginasReporte Robot LaberintoAngel HernandezAún no hay calificaciones
- Indra Mantis Sistema de Miniaeronaves No Tripuladas de Inteligencia Es 2019Documento2 páginasIndra Mantis Sistema de Miniaeronaves No Tripuladas de Inteligencia Es 2019diegonauthaAún no hay calificaciones
- Detector de MinasDocumento49 páginasDetector de MinasGerman MeraAún no hay calificaciones
- Avances en La Navegación Autónoma de Robots MóvilesDocumento3 páginasAvances en La Navegación Autónoma de Robots MóvilesJosue AguirreAún no hay calificaciones
- 4.1 - 4.2 2 Presentacion Tenicas de Mejoramiento de La Productividad 1Documento76 páginas4.1 - 4.2 2 Presentacion Tenicas de Mejoramiento de La Productividad 1Erik CastellanosAún no hay calificaciones
- Mecatrónica y Robótica PDFDocumento15 páginasMecatrónica y Robótica PDFJUAN DIEGO JIMENEZ VIZCARRAAún no hay calificaciones
- Informe Robotica MovilDocumento7 páginasInforme Robotica Movildanielw123Aún no hay calificaciones
- Clasificación de Los Robots - Robotica PunoDocumento6 páginasClasificación de Los Robots - Robotica PunoadrianAún no hay calificaciones
- Fundamentos de RoboticaDocumento18 páginasFundamentos de RoboticaJc RzAún no hay calificaciones
- Consulta N2 - ClasificaciónDocumento6 páginasConsulta N2 - ClasificaciónDiego RendonAún no hay calificaciones
- Introduccion ArticuloDocumento35 páginasIntroduccion ArticuloSergio Andres Fajardo SaldarriagaAún no hay calificaciones
- Manufactura Inteligente Utilizando Vision para RobotsDocumento6 páginasManufactura Inteligente Utilizando Vision para RobotsjavierchachacoAún no hay calificaciones
- Articulo Manipuladores Roboticos PDFDocumento6 páginasArticulo Manipuladores Roboticos PDFBrayanO'cconerAún no hay calificaciones
- Reporte de Parctica DCC - Paola Azeneth Perez PasillasDocumento3 páginasReporte de Parctica DCC - Paola Azeneth Perez PasillasPAOLA AZENETH PEREZ PASILLASAún no hay calificaciones
- 24 - DC - S1 - Alejando AvilaDocumento15 páginas24 - DC - S1 - Alejando AvilagalitopoAún no hay calificaciones
- Fase 2 Identificación de Los Sistemas Embebidos y Sus CaracterísticasDocumento7 páginasFase 2 Identificación de Los Sistemas Embebidos y Sus Característicasrobert santiago collazos bonillaAún no hay calificaciones
- Programación de microcontroladores paso a paso: Ejemplos prácticos desarrollados en la nubeDe EverandProgramación de microcontroladores paso a paso: Ejemplos prácticos desarrollados en la nubeAún no hay calificaciones
- Modal identification using smart mobile sensing unitsDe EverandModal identification using smart mobile sensing unitsAún no hay calificaciones
- Etapa 2 Hoja 2Documento1 páginaEtapa 2 Hoja 2Omar Cohen100% (1)
- Informe Venao ValleyDocumento9 páginasInforme Venao ValleyOmar CohenAún no hay calificaciones
- Los Limites Estático en Los ConductoresDocumento1 páginaLos Limites Estático en Los ConductoresOmar CohenAún no hay calificaciones
- PERMISO DE PUESTA A TIERRA ISA-CopiarDocumento4 páginasPERMISO DE PUESTA A TIERRA ISA-CopiarOmar CohenAún no hay calificaciones
- IT - Cálculo Mécanico - GuanicoDocumento28 páginasIT - Cálculo Mécanico - GuanicoOmar CohenAún no hay calificaciones
- Indicadores MediblesDocumento12 páginasIndicadores MediblesOmar CohenAún no hay calificaciones
- Folleto PQM-707 ES v4.02Documento6 páginasFolleto PQM-707 ES v4.02Omar CohenAún no hay calificaciones
- Pedestal 2Documento1 páginaPedestal 2Omar CohenAún no hay calificaciones
- Cuadro Eventos 1200ADocumento1 páginaCuadro Eventos 1200AOmar CohenAún no hay calificaciones
- Cuadro Eventos 200ADocumento1 páginaCuadro Eventos 200AOmar CohenAún no hay calificaciones
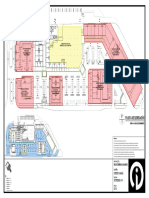
- Planos Electricos-El Paso PlazaDocumento69 páginasPlanos Electricos-El Paso PlazaOmar CohenAún no hay calificaciones
- Pedestal 1Documento1 páginaPedestal 1Omar CohenAún no hay calificaciones
- Clase 1Documento17 páginasClase 1Omar CohenAún no hay calificaciones
- ILU-02 PLAZA TERMINAL AGUADULCE 27sept2019Documento1 páginaILU-02 PLAZA TERMINAL AGUADULCE 27sept2019Omar CohenAún no hay calificaciones
- I ClaseDocumento20 páginasI ClaseOmar CohenAún no hay calificaciones
- Teı'cera. Fıs Espaıioles,: LEY Noviembre. Del SectorDocumento30 páginasTeı'cera. Fıs Espaıioles,: LEY Noviembre. Del SectorOmar CohenAún no hay calificaciones
- Capítulo 5 PDFDocumento32 páginasCapítulo 5 PDFCristóvão SumbaneAún no hay calificaciones
- Estructura Del Sector Eléctrico EspañolDocumento4 páginasEstructura Del Sector Eléctrico EspañolOmar CohenAún no hay calificaciones
- Dibujo Tecnico PDFDocumento36 páginasDibujo Tecnico PDFNottinhand ForestAún no hay calificaciones
- 2012.05.30 Operadores Sistema PDFDocumento97 páginas2012.05.30 Operadores Sistema PDFDarwin GuachaminAún no hay calificaciones
- Universidad Carlos III de Madrid: Escuela Politécnica SuperiorDocumento142 páginasUniversidad Carlos III de Madrid: Escuela Politécnica SuperiorOmar CohenAún no hay calificaciones
- UykuyDocumento24 páginasUykuygoliatcarroAún no hay calificaciones
- Planta General Lau - 1 - 30881 - B7471773.sv$-Sheet PDFDocumento1 páginaPlanta General Lau - 1 - 30881 - B7471773.sv$-Sheet PDFOmar CohenAún no hay calificaciones
- Estructura Del Sector Eléctrico EspañolDocumento4 páginasEstructura Del Sector Eléctrico EspañolOmar CohenAún no hay calificaciones
- UykuyDocumento24 páginasUykuygoliatcarroAún no hay calificaciones
- Teı'cera. Fıs Espaıioles,: LEY Noviembre. Del SectorDocumento30 páginasTeı'cera. Fıs Espaıioles,: LEY Noviembre. Del SectorOmar CohenAún no hay calificaciones
- Distitucion 1Documento3 páginasDistitucion 1Omar CohenAún no hay calificaciones
- Distitucion1 PDFDocumento3 páginasDistitucion1 PDFOmar CohenAún no hay calificaciones
- Código-Detrabajo de PanamáDocumento148 páginasCódigo-Detrabajo de Panamájose luis salazar sanchezAún no hay calificaciones
- Separata Teoria de EcuacionesDocumento1 páginaSeparata Teoria de EcuacionesXD GAMER PROAún no hay calificaciones
- Introducción Al Análisis Cuantitativo - Mapa ConceptualDocumento1 páginaIntroducción Al Análisis Cuantitativo - Mapa Conceptualjorgeand166Aún no hay calificaciones
- ESET Smart Security 9Documento4 páginasESET Smart Security 9ERICK EDSON CRUZ QUISPEAún no hay calificaciones
- Accesorios para Control de MotoresDocumento2 páginasAccesorios para Control de MotoresMarcela Raquel Quisbert FloresAún no hay calificaciones
- EA3 - Escuela Dos MundosDocumento4 páginasEA3 - Escuela Dos MundosErika Marlene Soto GuerraAún no hay calificaciones
- Presentacion Del Proyecto DiapositivasDocumento12 páginasPresentacion Del Proyecto DiapositivasAndrey ToledoAún no hay calificaciones
- Actividas 2 Evaluacion de Un RedDocumento8 páginasActividas 2 Evaluacion de Un Redoreste Martinez100% (1)
- Clase07 PDFDocumento5 páginasClase07 PDFjuan belitoAún no hay calificaciones
- Matriz IPERCDocumento1 páginaMatriz IPERCJoseAún no hay calificaciones
- S3.S1 Estructuras de Control SecuencialDocumento10 páginasS3.S1 Estructuras de Control SecuencialMaly SA100% (1)
- Limpieza, Mantenimiento, Acondicionamiento Yo Reparación de Instalaciones Turísticas en CircuitosDocumento30 páginasLimpieza, Mantenimiento, Acondicionamiento Yo Reparación de Instalaciones Turísticas en CircuitosanalilianamurrugarrasanchezAún no hay calificaciones
- T01m01a Argueta Luis Leer ECODocumento4 páginasT01m01a Argueta Luis Leer ECOLuis Argueta MogollónAún no hay calificaciones
- Tarea 3 Antropologia Psicologica y Psicologia CulturalDocumento5 páginasTarea 3 Antropologia Psicologica y Psicologia CulturalMågdä DäzäAún no hay calificaciones
- Que Es Un Detalle ConstructivoDocumento1 páginaQue Es Un Detalle ConstructivoLiliana Alejandra Martinez Gutierrez100% (1)
- NF2060 Tarea 1-1 Informe Investigacion Historia y Evolucion Del ComputadorDocumento6 páginasNF2060 Tarea 1-1 Informe Investigacion Historia y Evolucion Del ComputadorFeliix Emiilio SanchezAún no hay calificaciones
- CV Edil Son Javier Espejo PalmaDocumento1 páginaCV Edil Son Javier Espejo PalmaANTHONY VICTORAún no hay calificaciones
- Publicacion Acta 52 Mensajeria Mes Noviembre 01-03-2023Documento67 páginasPublicacion Acta 52 Mensajeria Mes Noviembre 01-03-2023natalioAún no hay calificaciones
- Diseño de InterfazDocumento33 páginasDiseño de Interfazaaacert12Aún no hay calificaciones
- Perdida de Cargas en BMDocumento18 páginasPerdida de Cargas en BMannAún no hay calificaciones
- Trabajo de Frontera MóvilDocumento2 páginasTrabajo de Frontera MóvilYadii SuarezAún no hay calificaciones
- Anexo 2 Formato PortadaDocumento8 páginasAnexo 2 Formato PortadaDianaAún no hay calificaciones
- 6ES72151AG400XB0Documento7 páginas6ES72151AG400XB0alicardozoAún no hay calificaciones
- Caso ArcorDocumento2 páginasCaso ArcorYulissa Leyton Galan0% (1)
- MT Informe Simulacion t3Documento11 páginasMT Informe Simulacion t3Renato CaceresAún no hay calificaciones
- T4 - Probabilidad y EstadisticaDocumento12 páginasT4 - Probabilidad y EstadisticaMelyna Vega100% (1)
- Diagrama IshikawaDocumento14 páginasDiagrama IshikawaKevin VsAún no hay calificaciones
- 1-Examen Parcial de Marketing Estrategico-Agosto-2021Documento2 páginas1-Examen Parcial de Marketing Estrategico-Agosto-2021Leslie Brissette Salinas CruzAún no hay calificaciones
- Como Hacer Un MiniLibroDocumento1 páginaComo Hacer Un MiniLibroPhilip PasmanickAún no hay calificaciones
- Formulario Matricula SENADocumento13 páginasFormulario Matricula SENAfabian chataAún no hay calificaciones
- Control. Cruz Morales GuillermoDocumento3 páginasControl. Cruz Morales GuillermoGUILLERMO CRUZ MORALESAún no hay calificaciones