También podría gustarte
- Oviedo Sistemas de EcuacionesDocumento50 páginasOviedo Sistemas de Ecuaciones3568Aún no hay calificaciones
- Oviedo Sistemas de Ecuaciones - DesbloqueadoDocumento50 páginasOviedo Sistemas de Ecuaciones - DesbloqueadodanielaAún no hay calificaciones
- Seminario de Tesis IDocumento11 páginasSeminario de Tesis IDiana Vela TiconaAún no hay calificaciones
- Sist Lin Ecs DifsDocumento51 páginasSist Lin Ecs DifsMartin FelipeAún no hay calificaciones
- Clase Semana5-MEF3Documento25 páginasClase Semana5-MEF3Jhunior Jhonatan Ramírez CarranzaAún no hay calificaciones
- La Transformada Wavelet Una Introducción - Ma. E. Domíinguez y G. Sansigre V. - Universidad Politécnica de Madrid PDFDocumento76 páginasLa Transformada Wavelet Una Introducción - Ma. E. Domíinguez y G. Sansigre V. - Universidad Politécnica de Madrid PDFJuanMegoAún no hay calificaciones
- Sistema de Ecuaciones DiferencialesDocumento14 páginasSistema de Ecuaciones DiferencialesDuvan LeonAún no hay calificaciones
- Sistemas y Ecuaciones LinealesDocumento20 páginasSistemas y Ecuaciones LinealesJosehAún no hay calificaciones
- Diagram As Def As Ev 2023Documento31 páginasDiagram As Def As Ev 2023hlg.musikerAún no hay calificaciones
- ED04Documento104 páginasED04Irene GarcíaAún no hay calificaciones
- S E L P O: Istemas de Cuaciones Ineales de Rimer RdenDocumento5 páginasS E L P O: Istemas de Cuaciones Ineales de Rimer RdenHenrry Josué Villanueva BazánAún no hay calificaciones
- Tema2 PDFDocumento28 páginasTema2 PDFAnonymous 7HFP8sAún no hay calificaciones
- Sistemas de Ecuaciones Diferenciales Ordinarias No LinealesDocumento14 páginasSistemas de Ecuaciones Diferenciales Ordinarias No LinealesAxel David Castro AguilarAún no hay calificaciones
- Ecuaciones DiferencialesDocumento113 páginasEcuaciones DiferencialesNathalie Ortiz100% (1)
- Leccion 01Documento19 páginasLeccion 01Álvaro Martínez SánchezAún no hay calificaciones
- Ecuaciones de Segundo OrdenDocumento17 páginasEcuaciones de Segundo OrdenJuan Sebas TianAún no hay calificaciones
- BernoulliDocumento149 páginasBernoulliPaula TilleriaAún no hay calificaciones
- Clase1 13 8 18Documento9 páginasClase1 13 8 18Juan ViscaAún no hay calificaciones
- 05 Tema5Documento12 páginas05 Tema5Ariadna LopezAún no hay calificaciones
- Tema3 Primera ParteDocumento44 páginasTema3 Primera Partefive shadowsAún no hay calificaciones
- SistemasDocumento38 páginasSistemasJosé Apaza balceraAún no hay calificaciones
- Cap 3Documento17 páginasCap 3Xavier TurAún no hay calificaciones
- 13.-Sistemas de EcuacionesDocumento68 páginas13.-Sistemas de EcuacionesPatriciaLlacsaLázaroAún no hay calificaciones
- Leccion 02Documento29 páginasLeccion 02Álvaro Martínez SánchezAún no hay calificaciones
- Ecuaciones Diferenciales Ordinarias y Sistemas de EcuacionesDocumento16 páginasEcuaciones Diferenciales Ordinarias y Sistemas de EcuacionesjdiezxAún no hay calificaciones
- Ecuaciones Diferenciales ParcialesDocumento8 páginasEcuaciones Diferenciales ParcialesNico OrdenesAún no hay calificaciones
- Ecuaciones DiferencialesDocumento8 páginasEcuaciones DiferencialesFlorenciaAún no hay calificaciones
- ED Relacion 5 MATEMATICAS II UJAENDocumento6 páginasED Relacion 5 MATEMATICAS II UJAENAndrés C BriceñoAún no hay calificaciones
- 2 SoluciÓn de Ecuaciones AlgebraicasDocumento17 páginas2 SoluciÓn de Ecuaciones AlgebraicaskchuchakAún no hay calificaciones
- Taller 2.2Documento4 páginasTaller 2.2Faccio0005 AAún no hay calificaciones
- Ecuaciones de EstadoDocumento8 páginasEcuaciones de Estado...Aún no hay calificaciones
- Lec10 PDFDocumento20 páginasLec10 PDFalicardozoAún no hay calificaciones
- Apunte OdesDocumento1 páginaApunte OdesfrizynnAún no hay calificaciones
- Ecuación de CauchyDocumento11 páginasEcuación de CauchyRockeritap LindawAún no hay calificaciones
- 4toapanta EscritoDocumento14 páginas4toapanta EscritoVicente AlvarezAún no hay calificaciones
- Apuntes Intro Valores PropiosDocumento8 páginasApuntes Intro Valores Propiosamigot3100% (1)
- EdosDocumento9 páginasEdosMauricio AnselmiAún no hay calificaciones
- Ecuaciones DiferencialesDocumento5 páginasEcuaciones DiferencialesAmIn20122Aún no hay calificaciones
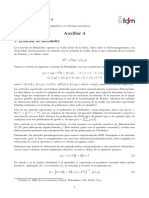
- Auxiliar 4Documento8 páginasAuxiliar 4Camilo Eduardo Avilés QuintanillaAún no hay calificaciones
- TransitoriosDocumento21 páginasTransitoriosricardo bocangel quispeAún no hay calificaciones
- Ecuaciones Diferenciales Por Método de Serie de PotenciasDocumento16 páginasEcuaciones Diferenciales Por Método de Serie de PotenciasCarlosAún no hay calificaciones
- Resumen Tema 7 y 8 Sistemas de Ecuaciones DifDocumento21 páginasResumen Tema 7 y 8 Sistemas de Ecuaciones DifSergio Torrano DíazAún no hay calificaciones
- Sesion 5 PDFDocumento14 páginasSesion 5 PDFRuben JPAún no hay calificaciones
- Matema IVDocumento417 páginasMatema IVapolomatriz0% (1)
- Taller 3Documento4 páginasTaller 3pedro alvarado mayorgaAún no hay calificaciones
- Teoría de Estabilidad de Las Ecuaciones Diferenciales OrdinariasDocumento146 páginasTeoría de Estabilidad de Las Ecuaciones Diferenciales OrdinariasrpY0Aún no hay calificaciones
- DuhamelDocumento3 páginasDuhameloutisAún no hay calificaciones
- Apuntes Control AutomaticoDocumento15 páginasApuntes Control Automaticofederico_farias_2Aún no hay calificaciones
- Hoja de PresentacionDocumento35 páginasHoja de PresentacionAlberto JimenezAún no hay calificaciones
- Ecuaciones DiferencialesDocumento52 páginasEcuaciones DiferencialesWalter SilvaAún no hay calificaciones
- Sesion 1 Edo PDFDocumento7 páginasSesion 1 Edo PDFABEL PUMA AYQUIAún no hay calificaciones
- Libro Ecuaciones Diferenciales PH ValenzuelaDocumento128 páginasLibro Ecuaciones Diferenciales PH ValenzuelaHoracio Alexis Sanhueza100% (1)
- Taller SeñalesDocumento3 páginasTaller SeñalesSebastián Medina RaigozaAún no hay calificaciones
- Libro Ecuaciones Diferenciales OrdinariasDocumento415 páginasLibro Ecuaciones Diferenciales OrdinariasJesús Juan Briceño AnicamaAún no hay calificaciones
- Expo Parte 2Documento4 páginasExpo Parte 2Wladimir Alejandro Silva CasteloAún no hay calificaciones
- Modelos Sistemas Ecuaciones DiferencialesDocumento56 páginasModelos Sistemas Ecuaciones DiferencialesErica Esther G'rAún no hay calificaciones
- XT Atxt Btyt FT Yt CTXT Dtyt GT: XT at BT XT FT Yt CT DT Yt GT XT Atxt FT XT XT at FT XT Atxt FT X Ax F X XT Y YtDocumento25 páginasXT Atxt Btyt FT Yt CTXT Dtyt GT: XT at BT XT FT Yt CT DT Yt GT XT Atxt FT XT XT at FT XT Atxt FT X Ax F X XT Y YtRoberto RodriguezAún no hay calificaciones
- VID 20230323 091519.mp4Documento1 páginaVID 20230323 091519.mp4Alex CasaoAún no hay calificaciones
- El Fabuloso Método de NivelesDocumento3 páginasEl Fabuloso Método de NivelesAlex CasaoAún no hay calificaciones
- Convocatoria de Reinscripción Preparatoria 2023Documento1 páginaConvocatoria de Reinscripción Preparatoria 2023Alex CasaoAún no hay calificaciones
- Act - 5 Examen de Muestra-3Documento5 páginasAct - 5 Examen de Muestra-3Alex CasaoAún no hay calificaciones
- Sesión 01 - GRUPO 1 - TrabajoDocumento8 páginasSesión 01 - GRUPO 1 - TrabajoKARLITA YOHANA VICENTE ARAUJOAún no hay calificaciones
- Matematicas Financieras 1 PDFDocumento271 páginasMatematicas Financieras 1 PDFSofi Alvarez100% (3)
- Acumulación y Distribución Del ExcedenteDocumento22 páginasAcumulación y Distribución Del ExcedenteVero VeritoAún no hay calificaciones
- Permutaciones PDFDocumento6 páginasPermutaciones PDFMilagrosNievesEspinozaAún no hay calificaciones
- Sistemas SubsistemasDocumento20 páginasSistemas SubsistemasTerly Maxz Nad TuanamaAún no hay calificaciones
- WP ContentuploadsMatematicas Academicas 3 ESO Anaya 14 Parametros Estadisticos PDFDocumento35 páginasWP ContentuploadsMatematicas Academicas 3 ESO Anaya 14 Parametros Estadisticos PDFLucía MGAún no hay calificaciones
- Monteza LWDocumento73 páginasMonteza LWJenniferMAún no hay calificaciones
- Antologia Psicotecnica PedagogicaDocumento115 páginasAntologia Psicotecnica PedagogicaGladys Zamudio100% (1)
- Violencia 5Documento7 páginasViolencia 5Wilber Condori ChoqueAún no hay calificaciones
- El Rol Del Facilitador PDFDocumento26 páginasEl Rol Del Facilitador PDFJuan David RichauxAún no hay calificaciones
- Genes HoxDocumento3 páginasGenes HoxJordan aronAún no hay calificaciones
- Guía - Tarea 1 - Pre - Tarea - ReconocimientoDocumento5 páginasGuía - Tarea 1 - Pre - Tarea - ReconocimientoErikaAún no hay calificaciones
- Casos PL 1 ResueltoDocumento13 páginasCasos PL 1 ResueltoCarmen HuamánAún no hay calificaciones
- Introducción A Las Energías RenovablesDocumento21 páginasIntroducción A Las Energías RenovablesJorge HeribertoAún no hay calificaciones
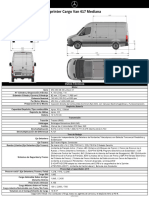
- Sprinter CargoVan 417 Mediana - 90764313-MXFDocumento1 páginaSprinter CargoVan 417 Mediana - 90764313-MXFManuel SalinasAún no hay calificaciones
- Majfud - Humanismo y Antihumanismo en La Critica LiterariaDocumento5 páginasMajfud - Humanismo y Antihumanismo en La Critica LiterariajoseAún no hay calificaciones
- Somos Inevitablemente MoralesDocumento8 páginasSomos Inevitablemente MoralesArturo CentenoAún no hay calificaciones
- El Sistema Educativo, Político y Religioso en MéxicoDocumento5 páginasEl Sistema Educativo, Político y Religioso en Méxicoluisangel121994Aún no hay calificaciones
- Ejercicios Ic para Una MediaDocumento1 páginaEjercicios Ic para Una MediaAna Luisa Guevara PrietoAún no hay calificaciones
- Gonzalez María Josetareas 10Documento4 páginasGonzalez María Josetareas 10Maria Jose Gonzalez TapiaAún no hay calificaciones
- Tabla de Utilizacion Procon PDFDocumento13 páginasTabla de Utilizacion Procon PDFanglejalgo100% (1)
- Semana 7 Actividad Guía para Cifrado y Descifrado Con AESDocumento8 páginasSemana 7 Actividad Guía para Cifrado y Descifrado Con AESDayanna Castiblanco50% (2)
- Proporcionalidad Directa e InversaDocumento6 páginasProporcionalidad Directa e InversaMisael ArteagaAún no hay calificaciones
- Calibrador de LainasDocumento2 páginasCalibrador de Lainasjavier alvarezAún no hay calificaciones
- Iluminacion-Preguntas GuiaDocumento5 páginasIluminacion-Preguntas GuiaFranco PeAún no hay calificaciones
- Análisis de Mercado para The Balance BowlDocumento3 páginasAnálisis de Mercado para The Balance BowlBrayan MuñozAún no hay calificaciones
- 2016 Kia Soul Ev 106576 PDFDocumento487 páginas2016 Kia Soul Ev 106576 PDFDavmattiAún no hay calificaciones
- Super Aqua Cure-VoxDocumento14 páginasSuper Aqua Cure-VoxJUANAún no hay calificaciones
- Sigma16 Es BDDocumento2 páginasSigma16 Es BDautoelevadoresAún no hay calificaciones
- Catalogo BitzerDocumento14 páginasCatalogo Bitzerfabioneiva100% (1)
- Inteligencia artificial: Lo que usted necesita saber sobre el aprendizaje automático, robótica, aprendizaje profundo, Internet de las cosas, redes neuronales, y nuestro futuroDe EverandInteligencia artificial: Lo que usted necesita saber sobre el aprendizaje automático, robótica, aprendizaje profundo, Internet de las cosas, redes neuronales, y nuestro futuroCalificación: 4 de 5 estrellas4/5 (1)
- La Biblia de las Matemáticas RápidasDe EverandLa Biblia de las Matemáticas RápidasCalificación: 4.5 de 5 estrellas4.5/5 (19)
- Didáctica de la matemática en la escuela primariaDe EverandDidáctica de la matemática en la escuela primariaCalificación: 2.5 de 5 estrellas2.5/5 (3)
- La magia de los números: 136 recreaciones aritméticas y geométricasDe EverandLa magia de los números: 136 recreaciones aritméticas y geométricasCalificación: 1 de 5 estrellas1/5 (1)
- Había una vez el átomo: O cómo los científicos imaginan lo invisibleDe EverandHabía una vez el átomo: O cómo los científicos imaginan lo invisibleCalificación: 5 de 5 estrellas5/5 (3)
- Mentalidades matemáticas: Cómo liberar el potencial de los estudiantes mediante las matemáticas creativas, mensajes inspiradores y una enseñanza innovadoraDe EverandMentalidades matemáticas: Cómo liberar el potencial de los estudiantes mediante las matemáticas creativas, mensajes inspiradores y una enseñanza innovadoraCalificación: 4.5 de 5 estrellas4.5/5 (5)
- Los mágicos números del Doctor Matrix: Conviértete en un maestro de los númerosDe EverandLos mágicos números del Doctor Matrix: Conviértete en un maestro de los númerosCalificación: 5 de 5 estrellas5/5 (2)
- Guía práctica para la refracción ocularDe EverandGuía práctica para la refracción ocularCalificación: 5 de 5 estrellas5/5 (2)
- Matemáticas financieras y evaluación de proyectos: Segunda ediciónDe EverandMatemáticas financieras y evaluación de proyectos: Segunda ediciónAún no hay calificaciones
- El Tao de la física: Una exploración de los paralelismos entre la física moderna y el misticismo orientalDe EverandEl Tao de la física: Una exploración de los paralelismos entre la física moderna y el misticismo orientalCalificación: 5 de 5 estrellas5/5 (3)
- Fundamentos de mecánica de fluidos.: Con ejercicios parcialmente resueltosDe EverandFundamentos de mecánica de fluidos.: Con ejercicios parcialmente resueltosAún no hay calificaciones
- Proyectos de instalaciones eléctrica de baja tensiónDe EverandProyectos de instalaciones eléctrica de baja tensiónCalificación: 5 de 5 estrellas5/5 (1)
- Física cuántica para principiantes: Descubra los fundamentos de la mecánica cuántica y cómo afecta al mundo en que vivimos a través de todas sus teorías más famosasDe EverandFísica cuántica para principiantes: Descubra los fundamentos de la mecánica cuántica y cómo afecta al mundo en que vivimos a través de todas sus teorías más famosasCalificación: 5 de 5 estrellas5/5 (4)
- Mi proyecto escolar Matemáticas Lúdicas: Adaptaciones curriculares para preescolar, primaria y secundariaDe EverandMi proyecto escolar Matemáticas Lúdicas: Adaptaciones curriculares para preescolar, primaria y secundariaCalificación: 5 de 5 estrellas5/5 (5)
- Enseñar Matemática hoy: Miradas, sentidos y desafíosDe EverandEnseñar Matemática hoy: Miradas, sentidos y desafíosCalificación: 5 de 5 estrellas5/5 (1)
- Estadística básica: Introducción a la estadística con RDe EverandEstadística básica: Introducción a la estadística con RCalificación: 5 de 5 estrellas5/5 (8)
- Matemáticas financierasDe EverandMatemáticas financierasCalificación: 4 de 5 estrellas4/5 (7)
- El cerebro matemático: Cómo nacen, viven y a veces mueren los números en nuestra menteDe EverandEl cerebro matemático: Cómo nacen, viven y a veces mueren los números en nuestra menteCalificación: 4 de 5 estrellas4/5 (5)
- Física paso a paso: Más de 100 problemas resueltosDe EverandFísica paso a paso: Más de 100 problemas resueltosCalificación: 4 de 5 estrellas4/5 (12)
- Sanación por Cristales - La guía definitiva para principiantes: Descubre el poder de los cristales curativos, piedras y minerales para la salud y la felicidadDe EverandSanación por Cristales - La guía definitiva para principiantes: Descubre el poder de los cristales curativos, piedras y minerales para la salud y la felicidadCalificación: 4.5 de 5 estrellas4.5/5 (14)
- Álgebra lineal aplicada a las ciencias económicas 2edDe EverandÁlgebra lineal aplicada a las ciencias económicas 2edCalificación: 4 de 5 estrellas4/5 (1)
- La Teoría de Conjuntos y los Fundamentos de las MatemáticasDe EverandLa Teoría de Conjuntos y los Fundamentos de las MatemáticasCalificación: 5 de 5 estrellas5/5 (1)
- Convertidores conmutados de potencia: Test de autoevaluaciónDe EverandConvertidores conmutados de potencia: Test de autoevaluaciónCalificación: 5 de 5 estrellas5/5 (1)