También podría gustarte
- BHHDocumento60 páginasBHHJames Herondale100% (1)
- Control de Tráfico AéreoDocumento16 páginasControl de Tráfico AéreoHans Andersson Castillo Cabanillas100% (1)
- Clase AviaciónDocumento16 páginasClase AviaciónAdrian Aguilar100% (1)
- Clasificación de Los Instrumentos de VueloDocumento9 páginasClasificación de Los Instrumentos de VueloBryan Herrera100% (1)
- Instructor de Vuelo - Semana 4Documento23 páginasInstructor de Vuelo - Semana 4Eduardo CruzadoAún no hay calificaciones
- Temario de Examen de Rpas 2022Documento14 páginasTemario de Examen de Rpas 2022Kaiser Stefano ATAún no hay calificaciones
- Qué Es Un UASDocumento3 páginasQué Es Un UASRossy Medina MorenoAún no hay calificaciones
- Temario de Examen Rpas RESUELTO - WordDocumento9 páginasTemario de Examen Rpas RESUELTO - WordEduard Marquez Campos100% (2)
- Filtros para Sistemas de RadiocomunicaciónDocumento6 páginasFiltros para Sistemas de RadiocomunicaciónRoberto HermenegildoAún no hay calificaciones
- Cap6 CalculoDeLaLongitudDePistaDocumento28 páginasCap6 CalculoDeLaLongitudDePistaDavid Gomez NuñezAún no hay calificaciones
- Rad 01Documento65 páginasRad 01Harold Rivas Saint-HilaireAún no hay calificaciones
- Perímetro y Área de FigurasDocumento13 páginasPerímetro y Área de FigurasHenry William Velasquez GamarraAún no hay calificaciones
- Operaciones auxiliares de mantenimiento externo de la aeronave. TMVO0109De EverandOperaciones auxiliares de mantenimiento externo de la aeronave. TMVO0109Aún no hay calificaciones
- Definiciones de La Terminología AeronáuticaDocumento40 páginasDefiniciones de La Terminología Aeronáuticacontroladoraereo40% (5)
- RPAS - Temario DGAC RESUELTODocumento14 páginasRPAS - Temario DGAC RESUELTOMilagros Neyra Livaque100% (2)
- PerformanceDocumento27 páginasPerformanceSebastián Estable100% (1)
- Avionica GeneralDocumento18 páginasAvionica GeneralEdgar BC100% (1)
- Factores Que Afectan A La SustentaciónDocumento62 páginasFactores Que Afectan A La SustentaciónJuan Carlos Hernandez CriadoAún no hay calificaciones
- Zecri EspañolDocumento99 páginasZecri EspañolFlor Ortiz J.Aún no hay calificaciones
- 1 Fases Del VueloDocumento32 páginas1 Fases Del VueloENRIQUE50% (2)
- Fundamentos de AerodinámicaDocumento46 páginasFundamentos de AerodinámicaFher GVAún no hay calificaciones
- Instrumentos de VueloDocumento16 páginasInstrumentos de VueloJose GomezAún no hay calificaciones
- Mir, Paco - No Es Tan FacilDocumento88 páginasMir, Paco - No Es Tan FacilAntonio Moreno VentepanAún no hay calificaciones
- Temario de Examen Rpas 2018 - Parte 1Documento8 páginasTemario de Examen Rpas 2018 - Parte 1juanAún no hay calificaciones
- Rpas-Fundamentacion (Colores) v3Documento58 páginasRpas-Fundamentacion (Colores) v3SO2 EP TORRES ESPINOZA MINERVAAún no hay calificaciones
- PerformanceDocumento6 páginasPerformanceLuis Felipe Solis Márquez100% (1)
- Vocabulario de EstructuraDocumento68 páginasVocabulario de EstructuraNayvelin GonzálezAún no hay calificaciones
- ACRONIMOS 2 (Aeronautico)Documento7 páginasACRONIMOS 2 (Aeronautico)carlosAún no hay calificaciones
- Actividad Cuestionario - Foro 4Documento9 páginasActividad Cuestionario - Foro 4William Andrés Esparza JuradoAún no hay calificaciones
- AltimetríaDocumento26 páginasAltimetríappAún no hay calificaciones
- Dap 11 - 00 20130328Documento471 páginasDap 11 - 00 20130328Grechko Minkowski100% (1)
- Operac-Aterrizajes Cat II y IIIDocumento60 páginasOperac-Aterrizajes Cat II y IIIjuanosenAún no hay calificaciones
- PerformanceDocumento10 páginasPerformancenoe alejandro MurilloAún no hay calificaciones
- Examen de Procedimiento de AeropuertosDocumento5 páginasExamen de Procedimiento de AeropuertosFabioAún no hay calificaciones
- IAAC - Conocimientos AeronauticosDocumento10 páginasIAAC - Conocimientos AeronauticosFlorencia TubioAún no hay calificaciones
- Velocidades Características 9726Documento9 páginasVelocidades Características 9726Lumo StudioAún no hay calificaciones
- Dan91 V1 PDFDocumento83 páginasDan91 V1 PDFsebaingAún no hay calificaciones
- Especialidad Aeromodelismo - Gama - Darwin RoaDocumento72 páginasEspecialidad Aeromodelismo - Gama - Darwin RoaMalven SilvaAún no hay calificaciones
- Manual Del DronDocumento14 páginasManual Del Drongallegosantony2003Aún no hay calificaciones
- Separata Carga y Trafico AereoDocumento22 páginasSeparata Carga y Trafico AereoNicoll Tarrillo03Aún no hay calificaciones
- TR Estefania Mancioc PDFDocumento7 páginasTR Estefania Mancioc PDFManuela Gallego ArangoAún no hay calificaciones
- Levantamiento Topográfico Con DroneDocumento42 páginasLevantamiento Topográfico Con DroneThiare ScarletteAún no hay calificaciones
- RadionavegacionDocumento172 páginasRadionavegacionCamila GonzalesAún no hay calificaciones
- 06 Características y Performances Del AviónDocumento5 páginas06 Características y Performances Del Aviónharina95100% (2)
- Dap-11 00Documento454 páginasDap-11 00Jesus Alvarado EspiritAún no hay calificaciones
- Drones - Taller4 - Brainner JuradoDocumento10 páginasDrones - Taller4 - Brainner JuradoBrainner A. Jurado ZambranoAún no hay calificaciones
- Manual de Operaciones Parte C Rutas y AeródromosDocumento27 páginasManual de Operaciones Parte C Rutas y AeródromosJavier AlcayagaAún no hay calificaciones
- PerformanceDocumento15 páginasPerformancejaviermarcano2908Aún no hay calificaciones
- Conclusiones PsicologiaDocumento7 páginasConclusiones PsicologiavegerrfAún no hay calificaciones
- Secc 2 Operaciones de Vuelo (FLT)Documento115 páginasSecc 2 Operaciones de Vuelo (FLT)ALPHALUFT AVIATIONAún no hay calificaciones
- Metrologia de AeronavegacionDocumento12 páginasMetrologia de AeronavegacionJean Pool Tafur Restrepo100% (1)
- RAP 303 - Capitulo 1 - ModifDocumento11 páginasRAP 303 - Capitulo 1 - ModifMolderinvAún no hay calificaciones
- RAP - 315 - Capitulo 1 - Enm1Documento9 páginasRAP - 315 - Capitulo 1 - Enm1joseAún no hay calificaciones
- Parte 1 Normas y Métodos Recomendados Internacionales BásicosDocumento24 páginasParte 1 Normas y Métodos Recomendados Internacionales BásicosJairo Mendoza GomezAún no hay calificaciones
- Notas Vuelo EstacionarioDocumento7 páginasNotas Vuelo EstacionarioSebastian DucuaraAún no hay calificaciones
- Foro 4 - Sireivys - Sepulveda.Documento4 páginasForo 4 - Sireivys - Sepulveda.sireivysAún no hay calificaciones
- Ata 31 Sabreliner-80 (Practica Navegacion Aerea)Documento11 páginasAta 31 Sabreliner-80 (Practica Navegacion Aerea)Marco PedrozaAún no hay calificaciones
- IMPRIMIRDocumento4 páginasIMPRIMIRBetsabec TelloAún no hay calificaciones
- 2.1 IntroducciónDocumento7 páginas2.1 IntroducciónCamilo CamoneAún no hay calificaciones
- DEFINICIONESDocumento10 páginasDEFINICIONESMargot AriasAún no hay calificaciones
- RVSMDocumento3 páginasRVSMMili VcAún no hay calificaciones
- Anexo 10Documento168 páginasAnexo 10Antonio Hernán Lora Luz100% (1)
- Resumen Examen Operacional Oral PCDocumento14 páginasResumen Examen Operacional Oral PCJoaquin VasquezAún no hay calificaciones
- RVSMDocumento13 páginasRVSMVicente Diaz VegaAún no hay calificaciones
- PLANEADORDocumento17 páginasPLANEADORJesusMartinezAún no hay calificaciones
- Constancia de Prestacion de Servicios - Manrrique AguilarDocumento2 páginasConstancia de Prestacion de Servicios - Manrrique Aguilarjhon fanoAún no hay calificaciones
- Of 01007 FiscaliaDocumento1 páginaOf 01007 Fiscaliajhon fanoAún no hay calificaciones
- Sufijos Nominales - Quechua 3r CicloDocumento15 páginasSufijos Nominales - Quechua 3r Ciclojhon fanoAún no hay calificaciones
- 01 Rpas-Legislacion (08-07-19) V3Documento31 páginas01 Rpas-Legislacion (08-07-19) V3jhon fanoAún no hay calificaciones
- Sufijos Nominales - Quechua 3r Ciclo - COMPLETODocumento39 páginasSufijos Nominales - Quechua 3r Ciclo - COMPLETOjhon fanoAún no hay calificaciones
- Oi - 076 - Revista Mensual Armt Cip Dni Set 22Documento1 páginaOi - 076 - Revista Mensual Armt Cip Dni Set 22jhon fanoAún no hay calificaciones
- Overclock en La Ram y VramDocumento21 páginasOverclock en La Ram y VramADAM KLAUS CHOQUE LAYMEAún no hay calificaciones
- Aranda Romero KarenDocumento24 páginasAranda Romero Karenleslie torres riveraAún no hay calificaciones
- Guion de Barrio ChinoDocumento119 páginasGuion de Barrio ChinoLuca CastelloAún no hay calificaciones
- Aplausos en La IglesiaDocumento4 páginasAplausos en La IglesiaabogansterdeantioqAún no hay calificaciones
- Tenemos Un Trato Y...Documento3 páginasTenemos Un Trato Y...Paul Lazaro HuamanAún no hay calificaciones
- Letra Otro MundoDocumento1 páginaLetra Otro MundoJuan Luis Fernández GalloAún no hay calificaciones
- Principales Hallazgos de Charles Darwin en El BeagleDocumento6 páginasPrincipales Hallazgos de Charles Darwin en El BeagleIlse ResendizAún no hay calificaciones
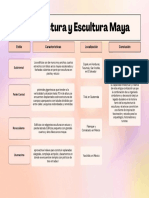
- Arquitectura y Escultura MayaDocumento1 páginaArquitectura y Escultura MayaYolanda Valencia CampecheAún no hay calificaciones
- Taller de Construcción de Juguetes Populares TradicionaleDocumento16 páginasTaller de Construcción de Juguetes Populares TradicionaleZapatomonAún no hay calificaciones
- Ejemplo Guion Teatral La LloronaDocumento2 páginasEjemplo Guion Teatral La LloronaPatricia BeatrizAún no hay calificaciones
- Evaluacion Preliminar de Una Dieta: TemaDocumento62 páginasEvaluacion Preliminar de Una Dieta: TemaDONNOVAN OMAR RUIZ TORRESAún no hay calificaciones
- Bases Concurso de Talentos Limatambo 2023Documento4 páginasBases Concurso de Talentos Limatambo 2023MilagrosAún no hay calificaciones
- Catedral de La AsunciónDocumento3 páginasCatedral de La AsunciónZenaid Andreina Rodulfo VerdeAún no hay calificaciones
- Certificado de Modificacion Camion de Servicio Esco Peru Rev 01Documento2 páginasCertificado de Modificacion Camion de Servicio Esco Peru Rev 01Jose QuiroaAún no hay calificaciones
- Ensayo de La Película: Its A Wonderful LifeDocumento3 páginasEnsayo de La Película: Its A Wonderful LifeLu CastroAún no hay calificaciones
- Entrevista A Juan Mayorga PDFDocumento14 páginasEntrevista A Juan Mayorga PDFroscarosAún no hay calificaciones
- Cubre RadiadorDocumento6 páginasCubre RadiadorJRLAún no hay calificaciones
- Edificios Culturales de SLPDocumento4 páginasEdificios Culturales de SLPfelipinpin1901Aún no hay calificaciones
- Taller Virtual Economia Grado 10Documento3 páginasTaller Virtual Economia Grado 10NatalyC Moreno100% (1)
- Charles Mackintosh-Lopez LopezDocumento15 páginasCharles Mackintosh-Lopez LopezTeresita LópezAún no hay calificaciones
- Actividades Dentro FueraDocumento2 páginasActividades Dentro FueraAlbaVozmedianoRodillaAún no hay calificaciones
- Centro LabanDocumento4 páginasCentro LabanTiTiAlcaínoAlcaínoAún no hay calificaciones
- Mercado DisneyDocumento9 páginasMercado DisneyHeidy T.Aún no hay calificaciones
- Tutor Virtual - Informacion - Redaccion 37762Documento28 páginasTutor Virtual - Informacion - Redaccion 37762Jhonatan Espino TorresAún no hay calificaciones
- BibliografíaDocumento4 páginasBibliografíaJose Bustos RuizAún no hay calificaciones