También podría gustarte
- Variadores de Frecuencia PDFDocumento23 páginasVariadores de Frecuencia PDFCarlos Miranda100% (1)
- Control de Velocidad de Motores Eléctricos Usando Variadores de Velocidad y Equipos MultifuncionalesDocumento14 páginasControl de Velocidad de Motores Eléctricos Usando Variadores de Velocidad y Equipos MultifuncionalesRosangelik MartinezAún no hay calificaciones
- Sistemas de Regulacion Maquinas ElectricasDocumento19 páginasSistemas de Regulacion Maquinas ElectricasHeber RaHeAún no hay calificaciones
- Introducción A Los Variadores de VelocidadDocumento6 páginasIntroducción A Los Variadores de VelocidadMiguel AYEAún no hay calificaciones
- Control de Velocidad de Los Motres de Induccion MonofasicoDocumento11 páginasControl de Velocidad de Los Motres de Induccion MonofasicoJuan Alvarado LujanAún no hay calificaciones
- Variación de Velocidad Por Cambio de Tensión y FrecuenciaDocumento4 páginasVariación de Velocidad Por Cambio de Tensión y FrecuenciaLuis Felipe ManzanoAún no hay calificaciones
- 1.6 Regulacion de La Velocidad Del MotorDocumento6 páginas1.6 Regulacion de La Velocidad Del MotorAntonio De Jesús NavaAún no hay calificaciones
- Arrancador Variador de VelocidadDocumento13 páginasArrancador Variador de VelocidadXIMOAún no hay calificaciones
- Propulsores C.A.Documento60 páginasPropulsores C.A.Danny López100% (1)
- Generalidades de Un Variador de FrecuanciaDocumento11 páginasGeneralidades de Un Variador de FrecuanciaRoberto Elias Hermenegildo TaboadaAún no hay calificaciones
- Control de Velocidad Del Motor de InducciónDocumento7 páginasControl de Velocidad Del Motor de InducciónSteven CastroAún no hay calificaciones
- Ii Unidad Variadores de VelocidadDocumento14 páginasIi Unidad Variadores de VelocidadIrving DE Jesus Chaparro JimenezAún no hay calificaciones
- Variadores de FrecuenciaDocumento21 páginasVariadores de Frecuencianestor265100% (1)
- Tema 63 Regulacion Vel - Mot. DC CCDocumento7 páginasTema 63 Regulacion Vel - Mot. DC CCJörg ScAún no hay calificaciones
- Variadores para Motores de CCDocumento5 páginasVariadores para Motores de CCEmmanuel Leon UrquizuAún no hay calificaciones
- Electrónica de Potencia MirandaDocumento29 páginasElectrónica de Potencia Mirandasergio eduardo samanamud leonAún no hay calificaciones
- En Qué Consiste La Regulación de Velocidad de Un Motor DCDocumento6 páginasEn Qué Consiste La Regulación de Velocidad de Un Motor DCJorge Luis Cazho TobarAún no hay calificaciones
- Motor PolifasicoDocumento8 páginasMotor PolifasicoAlfredo Melchí Caixba75% (4)
- ConverDocumento10 páginasConverGabriel Rodriguez ParedesAún no hay calificaciones
- Variador de Frecuencia CFW 100Documento7 páginasVariador de Frecuencia CFW 100Mijhael FernandezAún no hay calificaciones
- Cuestionario de Maquinas SíncronasDocumento7 páginasCuestionario de Maquinas Síncronasmadruga.bernalAún no hay calificaciones
- Variador de VelocidadDocumento9 páginasVariador de VelocidadMiguelAún no hay calificaciones
- Diapositiva de Variador de Velocidad CorregidoDocumento16 páginasDiapositiva de Variador de Velocidad CorregidoLuis Fernando AmézquitaAún no hay calificaciones
- Taller 11 VariadoresDocumento30 páginasTaller 11 VariadoresSantiago Arroyave CañaveralAún no hay calificaciones
- Propulsores de CADocumento7 páginasPropulsores de CAOswaldo Ordoñez Parapi0% (1)
- Motores BLDCDocumento35 páginasMotores BLDCRogelio Santiago León JapaAún no hay calificaciones
- 02 Control de Velocidad en Los Motores de InducciónDocumento3 páginas02 Control de Velocidad en Los Motores de Inducciónluisneiralopez100% (1)
- Regulacion de Velocidad en Los Motores de Corriente AlternaDocumento4 páginasRegulacion de Velocidad en Los Motores de Corriente Alternadisturbed80Aún no hay calificaciones
- Apuntes de Variadores de OmronDocumento33 páginasApuntes de Variadores de OmronNabil Mohamed AmarAún no hay calificaciones
- TrabaAplicación de Dispositivos de Electrónica de Potencias en El Ámbito de La Automatizaciónjo de Investigacion Electronica de Potencias - Francisco MaturanaDocumento58 páginasTrabaAplicación de Dispositivos de Electrónica de Potencias en El Ámbito de La Automatizaciónjo de Investigacion Electronica de Potencias - Francisco MaturanaFrancisco Xavier-Ignacio Maturana DelgadilloAún no hay calificaciones
- Sistemas de Control de Motores Monofasicos CaDocumento5 páginasSistemas de Control de Motores Monofasicos CaLizbeeth OsbourneAún no hay calificaciones
- Variadores de VelocidadDocumento13 páginasVariadores de VelocidadAlexander JiménezAún no hay calificaciones
- Informe Final ActuadoresDocumento24 páginasInforme Final Actuadoresluis fernando estupiñan gomezAún no hay calificaciones
- Control de Velocidad y Arranque de Motores de InduccionDocumento41 páginasControl de Velocidad y Arranque de Motores de InduccionDIAZ YORDY100% (1)
- Ensayo Variadores de FrecuenciaDocumento3 páginasEnsayo Variadores de FrecuenciagabydiaAún no hay calificaciones
- Unidad 4 EfrainDocumento18 páginasUnidad 4 EfrainIrving DE Jesus Chaparro JimenezAún no hay calificaciones
- Consulta Motores CCDocumento6 páginasConsulta Motores CCAndres MayorgaAún no hay calificaciones
- Arranque Del Motor SíncronoDocumento3 páginasArranque Del Motor SíncronoGerardo GonzálezAún no hay calificaciones
- Tipos de Variadores de Velocidad y ServomecanismosDocumento7 páginasTipos de Variadores de Velocidad y ServomecanismosJesus Josué González Gutiérrez100% (1)
- Deber Velocidad Controladores Estado SolidoDocumento4 páginasDeber Velocidad Controladores Estado Solidodario navedaAún no hay calificaciones
- Control y Regulación de La Velocidad en Motores AsincrónicoDocumento7 páginasControl y Regulación de La Velocidad en Motores AsincrónicoFabian PerezAún no hay calificaciones
- Variadores 6 y 12 PulsosDocumento8 páginasVariadores 6 y 12 PulsosJorge Alberto Quiza PolaniaAún no hay calificaciones
- Variadores de VelocidadDocumento22 páginasVariadores de Velocidadaalinares1100% (2)
- Así Funcionan Los Variadores de FrecuenciaDocumento12 páginasAsí Funcionan Los Variadores de FrecuenciaManuel SalgadoAún no hay calificaciones
- Variadores de Frecuencia PDFDocumento14 páginasVariadores de Frecuencia PDFAntonio MarunAún no hay calificaciones
- Resumen Variador de Frecuencia y Arrancador Suave - 19150778Documento1 páginaResumen Variador de Frecuencia y Arrancador Suave - 19150778jimenaAún no hay calificaciones
- Variador de VelocidadDocumento4 páginasVariador de VelocidadStevan CalatarAún no hay calificaciones
- Variadores de Velocidad y Arrancadores Suaves InformeDocumento23 páginasVariadores de Velocidad y Arrancadores Suaves InformeDaniel Palacios0% (1)
- Schneider Electric, Telemecanique, Altivar 18 - J Llanos, O Genova, M OrozcoDocumento15 páginasSchneider Electric, Telemecanique, Altivar 18 - J Llanos, O Genova, M OrozcoJota Mario LlanosAún no hay calificaciones
- Tecnicas para Variar La Velocidad de Motores de CD y CADocumento11 páginasTecnicas para Variar La Velocidad de Motores de CD y CAVictor NuñezAún no hay calificaciones
- Variadores y Arrancadores de PotenciaDocumento14 páginasVariadores y Arrancadores de PotenciaOctavio Lugo BAún no hay calificaciones
- Armónicas en Sistemas Eléctricos IndustrialesDe EverandArmónicas en Sistemas Eléctricos IndustrialesCalificación: 4.5 de 5 estrellas4.5/5 (12)
- Montaje y mantenimiento de máquinas eléctricas rotativas. ELEE0109De EverandMontaje y mantenimiento de máquinas eléctricas rotativas. ELEE0109Aún no hay calificaciones
- Curso moderno de máquinas eléctricas rotativas. Tomo II: Máquinas de corriente continuaDe EverandCurso moderno de máquinas eléctricas rotativas. Tomo II: Máquinas de corriente continuaAún no hay calificaciones
- Montaje y mantenimiento de transformadores. ELEE0109De EverandMontaje y mantenimiento de transformadores. ELEE0109Aún no hay calificaciones
- Curso moderno de máquinas eléctricas rotativas: Las máquinas eléctricas en régimen dinámicoDe EverandCurso moderno de máquinas eléctricas rotativas: Las máquinas eléctricas en régimen dinámicoAún no hay calificaciones
- Mantenimiento del sistema de arranque del motor del vehículo. TMVG0209De EverandMantenimiento del sistema de arranque del motor del vehículo. TMVG0209Calificación: 1 de 5 estrellas1/5 (2)
- Servicios complementarios en sistemas eléctricos de potencia: Análisis y modelamientoDe EverandServicios complementarios en sistemas eléctricos de potencia: Análisis y modelamientoCalificación: 5 de 5 estrellas5/5 (1)
- Curso moderno de máquinas eléctricas rotativas. Tomo IV: Máquinas síncronas y motores c.a. de colectorDe EverandCurso moderno de máquinas eléctricas rotativas. Tomo IV: Máquinas síncronas y motores c.a. de colectorAún no hay calificaciones
- Energía Eólica. Integración a la red eléctricaDe EverandEnergía Eólica. Integración a la red eléctricaCalificación: 3.5 de 5 estrellas3.5/5 (4)
- Motores de Corriente Alterna4Documento2 páginasMotores de Corriente Alterna4oscar antonio legorretaAún no hay calificaciones
- Motores de Corriente Alterna3Documento1 páginaMotores de Corriente Alterna3oscar antonio legorretaAún no hay calificaciones
- Condiciones de Paso RepetidasDocumento1 páginaCondiciones de Paso Repetidasoscar antonio legorretaAún no hay calificaciones
- Diagrama ElectricoDocumento1 páginaDiagrama Electricooscar antonio legorretaAún no hay calificaciones
- Qué Son Los PolímerosDocumento19 páginasQué Son Los Polímerososcar antonio legorretaAún no hay calificaciones
- Motores de Corriente Alterna10Documento3 páginasMotores de Corriente Alterna10oscar antonio legorretaAún no hay calificaciones
- Homo SapiensDocumento1 páginaHomo Sapiensoscar antonio legorreta100% (1)
- Manejo de ArmasDocumento31 páginasManejo de ArmasGaloCerdaAún no hay calificaciones
- Apus IeeDocumento54 páginasApus IeeDanner Rodolfo Santisteban CheroAún no hay calificaciones
- Accesorios Del TornoDocumento13 páginasAccesorios Del TornoMiguel Angel Montoya Motta92% (13)
- CilindradoDocumento8 páginasCilindradoJoseManuelRodriguezRamosAún no hay calificaciones
- Partidas Que FaltanDocumento12 páginasPartidas Que FaltanMarino Germán Fonseca DávilaAún no hay calificaciones
- Acopio y Tráfico de ArmasDocumento25 páginasAcopio y Tráfico de ArmasPerla GpAún no hay calificaciones
- Taller FresadoraDocumento5 páginasTaller Fresadorajuan lopezAún no hay calificaciones
- Hardware y Software BasicoDocumento24 páginasHardware y Software BasicoValentín RamosAún no hay calificaciones
- Control de 3 Motores Por Secuencia de Pasos Mediante Arrancadores MagneticosDocumento22 páginasControl de 3 Motores Por Secuencia de Pasos Mediante Arrancadores MagneticosLuis HernandezzAún no hay calificaciones
- DaniloDocumento36 páginasDaniloLuis Gavino AnlasAún no hay calificaciones
- N.6 - Ducato 2.8 JTD - Circuitos Electricos (Jun-06)Documento56 páginasN.6 - Ducato 2.8 JTD - Circuitos Electricos (Jun-06)Adrian PedroAún no hay calificaciones
- Manual Manejo Fresadora 12.67Documento32 páginasManual Manejo Fresadora 12.67Claudia Cecilia MontoyaAún no hay calificaciones
- Instalacion CorreasDocumento2 páginasInstalacion CorreasMATI RICAURTEAún no hay calificaciones
- Cuarto EjeDocumento7 páginasCuarto EjeMishu HermozaAún no hay calificaciones
- Ie299 Weg Proteccion Total 1Documento3 páginasIe299 Weg Proteccion Total 1George Benny Miranda ArrunateguiAún no hay calificaciones
- SSOMA-F-053 Inspección de AndamioDocumento3 páginasSSOMA-F-053 Inspección de AndamioEmerson Lian RiosAún no hay calificaciones
- INFORME CAJA DE VELOCIDADES FinalDocumento4 páginasINFORME CAJA DE VELOCIDADES FinalJuanse MoraAún no hay calificaciones
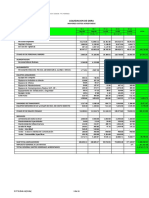
- 14-Gastos Generales AcreditadosDocumento11 páginas14-Gastos Generales AcreditadosJose Luis UlpAún no hay calificaciones
- Matts-sig-An-p-cvb-05 Cambio de Polea de Contrapeso en La Faja 4 0240-Cvb-004Documento10 páginasMatts-sig-An-p-cvb-05 Cambio de Polea de Contrapeso en La Faja 4 0240-Cvb-004Gutierrez Romero RoelAún no hay calificaciones
- Remocion de Viruta 1Documento47 páginasRemocion de Viruta 1Andres CastilloAún no hay calificaciones
- Check List DesfibriladorDocumento4 páginasCheck List DesfibriladorjosiasAún no hay calificaciones
- Dialnet PracticasDeMecanizadoEnTornoYFresadora 708694Documento78 páginasDialnet PracticasDeMecanizadoEnTornoYFresadora 708694Wady Gentil100% (1)
- Cálculo de La Longitud de La CadenaDocumento2 páginasCálculo de La Longitud de La Cadenaleonardo.mezaAún no hay calificaciones
- Anexo 16 DIAGRAMA UNIFILARDocumento3 páginasAnexo 16 DIAGRAMA UNIFILARreynaldorxAún no hay calificaciones
- Laboratorio #6Documento5 páginasLaboratorio #6Joselin Rojas GuerraAún no hay calificaciones
- Pir Md96 - X-28 AlarmasDocumento7 páginasPir Md96 - X-28 AlarmasJuan Alberto RuhkieckAún no hay calificaciones
- Funcion de Control EcmDocumento1 páginaFuncion de Control EcmNeftali Samuel ChávezAún no hay calificaciones
- Reloj de ArenaDocumento3 páginasReloj de ArenaAlexander Méndez0% (2)
- P3, El Teodolito y Sus Partes, La Puesta en Estación T1Documento12 páginasP3, El Teodolito y Sus Partes, La Puesta en Estación T1Antonio75% (4)
- EEPP CCDD #8 Ecuador IIDocumento8 páginasEEPP CCDD #8 Ecuador IIFrancisco VillalobosAún no hay calificaciones