También podría gustarte
- Montaje y mantenimiento de máquinas eléctricas rotativas. ELEE0109De EverandMontaje y mantenimiento de máquinas eléctricas rotativas. ELEE0109Aún no hay calificaciones
- Previa Practica 8 Vadirador de VelocidadDocumento6 páginasPrevia Practica 8 Vadirador de VelocidadOmar Asr AlejandroAún no hay calificaciones
- Control de Velocidad de Motores Eléctricos Usando Variadores de Velocidad y Equipos MultifuncionalesDocumento14 páginasControl de Velocidad de Motores Eléctricos Usando Variadores de Velocidad y Equipos MultifuncionalesRosangelik MartinezAún no hay calificaciones
- VARIADORES DE FRECUENCIA n1Documento4 páginasVARIADORES DE FRECUENCIA n1eddyaldochecaAún no hay calificaciones
- Informe Variador DevelocidadDocumento7 páginasInforme Variador DevelocidadSERGIO HERNAN MATEUS OSORIOAún no hay calificaciones
- Variador de FrecuenciaDocumento8 páginasVariador de FrecuenciavicenteAún no hay calificaciones
- Controles Elect-Tarea1-U5Documento5 páginasControles Elect-Tarea1-U5Christian Eduardo Sanchez SandovalAún no hay calificaciones
- Variadores de VelocidadDocumento15 páginasVariadores de VelocidadEduardo GavilanesAún no hay calificaciones
- Taller 11 VariadoresDocumento30 páginasTaller 11 VariadoresSantiago Arroyave CañaveralAún no hay calificaciones
- Variadores de Velocidad en El Ámbito de EficienciaDocumento6 páginasVariadores de Velocidad en El Ámbito de EficienciaMauricio LlanoAún no hay calificaciones
- Informe Variador de VelocidadDocumento14 páginasInforme Variador de VelocidadWilson Eduardo Mesa Suarez50% (2)
- Variador de Velocidad ImprimirDocumento6 páginasVariador de Velocidad ImprimirdiegoAún no hay calificaciones
- Variador de FrecuenciaDocumento14 páginasVariador de FrecuenciaLalo HeRaAún no hay calificaciones
- Variado de VelocidadDocumento11 páginasVariado de VelocidadJose MoralesAún no hay calificaciones
- Variador de FrecuenciaDocumento12 páginasVariador de FrecuenciaJosue Tenecota CastroAún no hay calificaciones
- Variadores de VelocidadDocumento13 páginasVariadores de VelocidadAlexander JiménezAún no hay calificaciones
- Clase Variadores de Velocidad PolitecnicoDocumento23 páginasClase Variadores de Velocidad PolitecnicoyaniAún no hay calificaciones
- Universidad Técnica de Cotopaxi: IntroducciónDocumento42 páginasUniversidad Técnica de Cotopaxi: IntroducciónGEOVANNY ANDRANGOAún no hay calificaciones
- Tesis Variador de VelocidadDocumento17 páginasTesis Variador de VelocidadJezer Lugo100% (1)
- Informe Variador de Velocidad N 9Documento12 páginasInforme Variador de Velocidad N 9Katherine María Zambrano CasasAún no hay calificaciones
- Variedades de FrecuenciaDocumento9 páginasVariedades de FrecuenciaAngie Torres HerreraAún no hay calificaciones
- Unidad 4 Variadores de VelocidadDocumento17 páginasUnidad 4 Variadores de VelocidadJorge Vilchis Reyes RetanaAún no hay calificaciones
- Variadores de VelocidadDocumento21 páginasVariadores de VelocidadedgarAún no hay calificaciones
- Variadores de VelocidadDocumento4 páginasVariadores de Velocidadbrayan quispeAún no hay calificaciones
- Variadores de VelocidadDocumento21 páginasVariadores de VelocidadDario MondragonAún no hay calificaciones
- Unidad 5 y 6 Controles ElectricosDocumento13 páginasUnidad 5 y 6 Controles Electricosjesus garciaAún no hay calificaciones
- Actividad 3Documento12 páginasActividad 3eduardoacevedo793Aún no hay calificaciones
- Arrancador Variador de VelocidadDocumento13 páginasArrancador Variador de VelocidadXIMOAún no hay calificaciones
- Ensayo Variadores de FrecuenciaDocumento3 páginasEnsayo Variadores de Frecuenciaivan100% (1)
- Vriadores de FrecuenciaDocumento6 páginasVriadores de FrecuenciadmejiagaAún no hay calificaciones
- Así Funcionan Los Variadores de FrecuenciaDocumento12 páginasAsí Funcionan Los Variadores de FrecuenciaManuel SalgadoAún no hay calificaciones
- Ensayo Variadores de FrecuenciaDocumento3 páginasEnsayo Variadores de FrecuenciagabydiaAún no hay calificaciones
- Variador de Velocidad de Motores ElectricosDocumento133 páginasVariador de Velocidad de Motores Electricosarturo_87Aún no hay calificaciones
- Investigaciones Variador de FrecuenciaDocumento9 páginasInvestigaciones Variador de FrecuenciaRaul AyalaAún no hay calificaciones
- Introducción A Los Variadores de VelocidadDocumento6 páginasIntroducción A Los Variadores de VelocidadMiguel AYEAún no hay calificaciones
- El Control Electrónico de Motores de Corriente DirectaDocumento5 páginasEl Control Electrónico de Motores de Corriente Directa10042767Aún no hay calificaciones
- Variadores de VelocidadDocumento5 páginasVariadores de VelocidadCarlos LozadaAún no hay calificaciones
- Aplicaciones de Los Variadores de Velocidad.Documento12 páginasAplicaciones de Los Variadores de Velocidad.Jordy Obregon100% (2)
- Informe - Control Electronico de MotoresDocumento10 páginasInforme - Control Electronico de MotorescristoferAún no hay calificaciones
- Tipos de Variadores de Velocidad y ServomecanismosDocumento7 páginasTipos de Variadores de Velocidad y ServomecanismosJesus Josué González Gutiérrez100% (1)
- Reles y Variadores de VelocidadDocumento20 páginasReles y Variadores de VelocidadIvonne Stephany Calcina AbantoAún no hay calificaciones
- Variador Velocidad MaquinasDocumento9 páginasVariador Velocidad MaquinasJm DsoAún no hay calificaciones
- Generalidades de Un Variador de FrecuanciaDocumento11 páginasGeneralidades de Un Variador de FrecuanciaRoberto Elias Hermenegildo TaboadaAún no hay calificaciones
- Control de Velocidad PWM Motor AC ..1Documento19 páginasControl de Velocidad PWM Motor AC ..1Lucia VidalAún no hay calificaciones
- Controladores para Motores de Induccion - AndreilysurbinaDocumento5 páginasControladores para Motores de Induccion - AndreilysurbinaAndreilys UrbinaAún no hay calificaciones
- Variadordefrec Ylla AsignacionDocumento6 páginasVariadordefrec Ylla AsignacionThirsa YllaAún no hay calificaciones
- Unidad 4 Variadores de VelocidadDocumento17 páginasUnidad 4 Variadores de VelocidadJoseAún no hay calificaciones
- Variador de FrecuenciaDocumento4 páginasVariador de FrecuenciaJesus B. ChivasAún no hay calificaciones
- Variadores de Frecuencia PDFDocumento23 páginasVariadores de Frecuencia PDFCarlos Miranda100% (1)
- Variadores de Velocidad CD y CADocumento22 páginasVariadores de Velocidad CD y CAJorge Villalobos JiménezAún no hay calificaciones
- Tarea 3 - DebateAutomatizaciónDocumento19 páginasTarea 3 - DebateAutomatizaciónAndres Felipe Cuartas AguirreAún no hay calificaciones
- CONVERTIDOR DE FRECUENCIA CON MODULACIÃ - N POR AMPLITUD DE PULSO Con NumerosDocumento128 páginasCONVERTIDOR DE FRECUENCIA CON MODULACIÃ - N POR AMPLITUD DE PULSO Con NumerosguillermoAún no hay calificaciones
- Variadores y Arrancadores de PotenciaDocumento14 páginasVariadores y Arrancadores de PotenciaOctavio Lugo BAún no hay calificaciones
- Gustavo Campos Martinez - Actividad 09 - v1Documento4 páginasGustavo Campos Martinez - Actividad 09 - v1MigueelPérezAún no hay calificaciones
- VariadoresDocumento43 páginasVariadoresHarry Alvarez100% (2)
- Variador de VelocidadDocumento13 páginasVariador de VelocidadJionni Dlzma100% (1)
- Teoria VariadoresDocumento18 páginasTeoria Variadoresneointelperu.backofficeAún no hay calificaciones
- Variadores de FeecuenciaDocumento7 páginasVariadores de FeecuenciaBenjamín RGTZAún no hay calificaciones
- 3.1 Definicion y EstructuraDocumento4 páginas3.1 Definicion y EstructuraPedro Luis Perez GonzalezAún no hay calificaciones
- Ensayo de BaldorDocumento6 páginasEnsayo de Baldorcomar05Aún no hay calificaciones
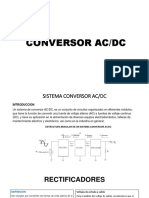
- Rectificadores TrifásicosDocumento3 páginasRectificadores TrifásicosDaniel F. RodasAún no hay calificaciones
- Silabo Laboratorio MaquinasDocumento4 páginasSilabo Laboratorio MaquinasNuñez HarryAún no hay calificaciones
- PreciosDocumento137 páginasPreciosGuino Andino BustaAún no hay calificaciones
- Reles y Motores Paso A PasoDocumento6 páginasReles y Motores Paso A PasoGueryDeLaBarraCervantesAún no hay calificaciones
- Presupuesto Luminarias MP SigmaplastDocumento2 páginasPresupuesto Luminarias MP SigmaplastRoberto De Mesa PAún no hay calificaciones
- Motor Bur 18 L Derbypdf PDFDocumento11 páginasMotor Bur 18 L Derbypdf PDFYahir ArizmendiAún no hay calificaciones
- Conversor Ac - DCDocumento36 páginasConversor Ac - DCLuis Bengoa UndaAún no hay calificaciones
- Clase 6 InterruptoresDocumento87 páginasClase 6 Interruptoresricardo100% (1)
- Electro Servicios IndustrialesDocumento10 páginasElectro Servicios IndustrialesLuis Leon AlvaradoAún no hay calificaciones
- Laboratorio 1Documento7 páginasLaboratorio 1Ivo Ludyerio Da SilvaAún no hay calificaciones
- Actividad N°4 Gianpiero ZecchettiDocumento20 páginasActividad N°4 Gianpiero ZecchettiGianpieroZecchettiAún no hay calificaciones
- Esquemas AutomatismoDocumento22 páginasEsquemas AutomatismoLeoAún no hay calificaciones
- Puesta A TierraDocumento3 páginasPuesta A TierraHector SanchezAún no hay calificaciones
- Investigación de Motores de CDDocumento5 páginasInvestigación de Motores de CDaleAún no hay calificaciones
- Alarma Contra LadronesDocumento2 páginasAlarma Contra LadronesdarwaveAún no hay calificaciones
- Adaptador o Cargade de Laptop11Documento5 páginasAdaptador o Cargade de Laptop11Car GuerraAún no hay calificaciones
- Lab - Sensores - NTC - LM35Documento7 páginasLab - Sensores - NTC - LM35CAMILO ROZOAún no hay calificaciones
- Protocolo FAT - NETA 2009Documento4 páginasProtocolo FAT - NETA 2009Robert J. Lira C.100% (2)
- LAB 06.-Arranque Con Eliminación de Resistencias Rotoricas 2022 PDFDocumento8 páginasLAB 06.-Arranque Con Eliminación de Resistencias Rotoricas 2022 PDFJordan LHAún no hay calificaciones
- Practica N°5 - Condensadores, Capacidad Eléctrica, y Arreglos-2016-MecDocumento5 páginasPractica N°5 - Condensadores, Capacidad Eléctrica, y Arreglos-2016-MecCarlos Eduardo Joo GarcíaAún no hay calificaciones
- Componentes ElectronicosDocumento3 páginasComponentes ElectronicosStephanie Gabriela Molina MontoyaAún no hay calificaciones
- Memoria de Calculo Reservorio RAP-01 Rev.0Documento2 páginasMemoria de Calculo Reservorio RAP-01 Rev.0Sergio AvilaAún no hay calificaciones
- Presupuesto Iluminacion SilosDocumento4 páginasPresupuesto Iluminacion Silosjose luisAún no hay calificaciones
- Informe Tecnico Efrain CoyagoDocumento11 páginasInforme Tecnico Efrain CoyagoPricila BarreraAún no hay calificaciones
- Adoquitecnia 6 Abril PDFDocumento4 páginasAdoquitecnia 6 Abril PDFajax87Aún no hay calificaciones
- Thomas - Guía 2 Fisica 5to AÑO CondensadoresDocumento9 páginasThomas - Guía 2 Fisica 5to AÑO CondensadoresJUAN MEDINAAún no hay calificaciones
- Silabo ML 839 Electronica de Potencia 2020-1Documento2 páginasSilabo ML 839 Electronica de Potencia 2020-1saverfimAún no hay calificaciones
- Guía Práctica RefuerzosDocumento7 páginasGuía Práctica RefuerzosAlvaro Alomoto100% (1)
- VDFDocumento11 páginasVDFLukautomat0% (1)
- Lab Oratorio 1Documento6 páginasLab Oratorio 1Luis Karlos SosaAún no hay calificaciones
- Lean Startup: Cómo trabajar de manera más inteligente y no más duro mientras se innova más rápido y se satisface a los clientesDe EverandLean Startup: Cómo trabajar de manera más inteligente y no más duro mientras se innova más rápido y se satisface a los clientesCalificación: 4 de 5 estrellas4/5 (8)
- 44 Apps Inteligentes para Ejercitar su Cerebro: Apps Gratuitas, Juegos, y Herramientas para iPhone, iPad, Google Play, Kindle Fire, Navegadores de Internet, Windows Phone, & Apple WatchDe Everand44 Apps Inteligentes para Ejercitar su Cerebro: Apps Gratuitas, Juegos, y Herramientas para iPhone, iPad, Google Play, Kindle Fire, Navegadores de Internet, Windows Phone, & Apple WatchCalificación: 3.5 de 5 estrellas3.5/5 (2)
- 7 tendencias digitales que cambiarán el mundoDe Everand7 tendencias digitales que cambiarán el mundoCalificación: 4.5 de 5 estrellas4.5/5 (87)
- La biblia del e-commerce: Los secretos de la venta online. Más de mil ideas para vender por internetDe EverandLa biblia del e-commerce: Los secretos de la venta online. Más de mil ideas para vender por internetCalificación: 5 de 5 estrellas5/5 (7)
- Inteligencia artificial: Lo que usted necesita saber sobre el aprendizaje automático, robótica, aprendizaje profundo, Internet de las cosas, redes neuronales, y nuestro futuroDe EverandInteligencia artificial: Lo que usted necesita saber sobre el aprendizaje automático, robótica, aprendizaje profundo, Internet de las cosas, redes neuronales, y nuestro futuroCalificación: 4 de 5 estrellas4/5 (1)
- Confección de cojines y ropa de hogar. TCPF0309De EverandConfección de cojines y ropa de hogar. TCPF0309Aún no hay calificaciones
- El Método Agile: Lo que Necesita Saber Sobre Gestión de Proyectos Agile, el Proceso Kanban, Pensamiento Lean, y ScrumDe EverandEl Método Agile: Lo que Necesita Saber Sobre Gestión de Proyectos Agile, el Proceso Kanban, Pensamiento Lean, y ScrumCalificación: 5 de 5 estrellas5/5 (1)
- Electricidad: Fundamentos y problemas de electrostática, corriente continua, electromagnetiDe EverandElectricidad: Fundamentos y problemas de electrostática, corriente continua, electromagnetiCalificación: 3.5 de 5 estrellas3.5/5 (5)
- Clics contra la humanidad: Libertad y resistencia en la era de la distracción tecnológicaDe EverandClics contra la humanidad: Libertad y resistencia en la era de la distracción tecnológicaCalificación: 4.5 de 5 estrellas4.5/5 (117)
- UF0054: APROVISIONAMIENTO DE MATERIAS PRIMAS EN COCINA (HOTR0108)De EverandUF0054: APROVISIONAMIENTO DE MATERIAS PRIMAS EN COCINA (HOTR0108)Aún no hay calificaciones
- Mini granja para principiantes: La guía definitiva para convertir su jardín en una mini granja y crear un jardín orgánico autosuficienteDe EverandMini granja para principiantes: La guía definitiva para convertir su jardín en una mini granja y crear un jardín orgánico autosuficienteCalificación: 2 de 5 estrellas2/5 (1)
- JavaScript Una Guía de Aprendizaje para el Lenguaje de Programación JavaScriptDe EverandJavaScript Una Guía de Aprendizaje para el Lenguaje de Programación JavaScriptCalificación: 3 de 5 estrellas3/5 (5)
- Calidad de Aguas: Usos y AprovechamientoDe EverandCalidad de Aguas: Usos y AprovechamientoCalificación: 5 de 5 estrellas5/5 (1)
- Prácticas de refrigeración y aire acondicionadoDe EverandPrácticas de refrigeración y aire acondicionadoCalificación: 5 de 5 estrellas5/5 (6)
- Agile: Una guía para la Gestión de Proyectos Agile con Scrum, Kanban y LeanDe EverandAgile: Una guía para la Gestión de Proyectos Agile con Scrum, Kanban y LeanCalificación: 5 de 5 estrellas5/5 (1)
- El ADN espiritual: Método de iluminación espiritualDe EverandEl ADN espiritual: Método de iluminación espiritualCalificación: 4.5 de 5 estrellas4.5/5 (16)
- Influencia. La psicología de la persuasiónDe EverandInfluencia. La psicología de la persuasiónCalificación: 4.5 de 5 estrellas4.5/5 (14)
- Guía de cálculo y diseño de conductos para ventilación y climatizaciónDe EverandGuía de cálculo y diseño de conductos para ventilación y climatizaciónCalificación: 5 de 5 estrellas5/5 (1)
- Investigación de operaciones: Conceptos fundamentalesDe EverandInvestigación de operaciones: Conceptos fundamentalesCalificación: 4.5 de 5 estrellas4.5/5 (2)
- Kanban: La guía definitiva de la metodología Kanban para el desarrollo de software ágil (Libro en Español/Kanban Spanish Book)De EverandKanban: La guía definitiva de la metodología Kanban para el desarrollo de software ágil (Libro en Español/Kanban Spanish Book)Calificación: 4.5 de 5 estrellas4.5/5 (6)
- Química orgánica: ejercicios de aplicaciónDe EverandQuímica orgánica: ejercicios de aplicaciónCalificación: 5 de 5 estrellas5/5 (3)