También podría gustarte
- Ejemplario: Ecuaciones Diferenciales OrdinariasDe EverandEjemplario: Ecuaciones Diferenciales OrdinariasAún no hay calificaciones
- 1.2.2 Guía de Taller 2Documento4 páginas1.2.2 Guía de Taller 2Juan PabloAún no hay calificaciones
- 1.3.2 Guía de Taller 3Documento6 páginas1.3.2 Guía de Taller 3Juan PabloAún no hay calificaciones
- Silabo Ingeniería de Control Por Competencias 19VDocumento9 páginasSilabo Ingeniería de Control Por Competencias 19VEduardo MartinezAún no hay calificaciones
- Manual Matemática I - 1806Documento46 páginasManual Matemática I - 1806Henry AstuyauriAún no hay calificaciones
- Manual Del CursoDocumento46 páginasManual Del CursoPedro MLAún no hay calificaciones
- Manual 2015-I 01 MatemáTica (1806)Documento46 páginasManual 2015-I 01 MatemáTica (1806)Anya Paredes Ayala0% (1)
- Ecuaciones DiferencialesDocumento8 páginasEcuaciones DiferencialesPaul AlexanderAún no hay calificaciones
- Matemática para Los Negocios (2240) SPDocumento48 páginasMatemática para Los Negocios (2240) SPOmar Alexander Guerrero LoardoAún no hay calificaciones
- Control1 SyllabusDocumento7 páginasControl1 Syllabuskatrina Larza NaraAún no hay calificaciones
- Silabo Sistemas de Control - 2021 - BDocumento8 páginasSilabo Sistemas de Control - 2021 - BsebastianAún no hay calificaciones
- M2 - Pensamiento AlgorítmicoDocumento14 páginasM2 - Pensamiento AlgorítmicoMarcelocksley Link WinwalkerAún no hay calificaciones
- Manual 2020 01 Matemática Ap A Los Negocios (2240)Documento70 páginasManual 2020 01 Matemática Ap A Los Negocios (2240)Cg NicolAún no hay calificaciones
- Manual 2023 02 Matemática AP A Los Negocios (2240) SPDocumento48 páginasManual 2023 02 Matemática AP A Los Negocios (2240) SPLuis MachaAún no hay calificaciones
- SilaboDocumento7 páginasSilaboSamu PacurucuAún no hay calificaciones
- Manual 2017-I Matemática Aplicada A Los Negocios (2240) PDFDocumento48 páginasManual 2017-I Matemática Aplicada A Los Negocios (2240) PDFJuan José Falcon Ponce100% (2)
- Manual de Matemática Aplicada A Los Negocios (2240) PDFDocumento50 páginasManual de Matemática Aplicada A Los Negocios (2240) PDFEl Josuke100% (2)
- Control 1 SilaboDocumento7 páginasControl 1 SilaboErRobert ChAún no hay calificaciones
- Syllabus Control de Procesos Industriales - X 2020-IDocumento10 páginasSyllabus Control de Procesos Industriales - X 2020-IVictor OreAún no hay calificaciones
- 100000I22N SistemasDeControlClasicoDocumento5 páginas100000I22N SistemasDeControlClasicoJuan Carlos LudwigAún no hay calificaciones
- Sistemas de Control Previo 1Documento2 páginasSistemas de Control Previo 1Jonathan Diaz VeraAún no hay calificaciones
- 23332-Tratamiento de Señales 2018-1Documento7 páginas23332-Tratamiento de Señales 2018-1Tomas Camilo EstupiñanAún no hay calificaciones
- Sistemas de Control ClasicoDocumento6 páginasSistemas de Control ClasicoLokazo BrihammzAún no hay calificaciones
- Anaberam - 23332-Tratamiento de Señales 2022-2-FinalDocumento8 páginasAnaberam - 23332-Tratamiento de Señales 2022-2-FinalLeonel Luna RuedasAún no hay calificaciones
- Silabo Competencias - Sistemas - Control - Digital Unac-2023aDocumento9 páginasSilabo Competencias - Sistemas - Control - Digital Unac-2023aSebastian SoteloAún no hay calificaciones
- Silabo-EA101-PROCESOS ESTOCASTICOS-2021BDocumento6 páginasSilabo-EA101-PROCESOS ESTOCASTICOS-2021BOscar AliagaAún no hay calificaciones
- Em 08 EMEDPT U2 ACDocumento4 páginasEm 08 EMEDPT U2 ACElisaAlanizAún no hay calificaciones
- Taller 1. Representaciones de Un SistemaDocumento3 páginasTaller 1. Representaciones de Un Sistemadaniel alejandro chaparro zipaAún no hay calificaciones
- 4 Ficha de Aplicación-Sesión 3-Sem.2-Exp.5-MateDocumento5 páginas4 Ficha de Aplicación-Sesión 3-Sem.2-Exp.5-Matejesus eduardoAún no hay calificaciones
- Guía Algoritmos - M171Documento12 páginasGuía Algoritmos - M171El BandicaatpAún no hay calificaciones
- SILABODocumento6 páginasSILABOWilmer More PalominoAún no hay calificaciones
- ManualproblemasDocumento69 páginasManualproblemasJassielAún no hay calificaciones
- Syllabus - Matematicas Aplicadas - 2016-IDocumento4 páginasSyllabus - Matematicas Aplicadas - 2016-ID Nk PeláezAún no hay calificaciones
- Instrumentación EdoDocumento20 páginasInstrumentación EdoAndres zj06Aún no hay calificaciones
- Sistemas Lineales y No LinealesDocumento5 páginasSistemas Lineales y No Linealesjuanper2023 perAún no hay calificaciones
- Sílabo de Tren de RodajeDocumento7 páginasSílabo de Tren de RodajeEdison Fabricio Lema ParraAún no hay calificaciones
- 3 1 2 Guia 11 Panel CO4205 1L Convertidor Descendente Reductores de CC CCDocumento12 páginas3 1 2 Guia 11 Panel CO4205 1L Convertidor Descendente Reductores de CC CCRafael Alejandro Lizana CalderonAún no hay calificaciones
- Unidad 1 Mate 2Documento19 páginasUnidad 1 Mate 2marty chavez (Mcfly)Aún no hay calificaciones
- Guía UC A171Documento11 páginasGuía UC A171leo jocetAún no hay calificaciones
- Investigacion de OperacionesDocumento11 páginasInvestigacion de Operacionespepepateatraseros_01Aún no hay calificaciones
- Expo. Cap. 10Documento46 páginasExpo. Cap. 10Jorge Aguiar TiradoAún no hay calificaciones
- Plan de Clases Automatismos Electricos I - 2017Documento10 páginasPlan de Clases Automatismos Electricos I - 2017Felipe DiazAún no hay calificaciones
- Informe Nº2Documento3 páginasInforme Nº2Alejandra CalsinaAún no hay calificaciones
- Silabo - 17302Documento8 páginasSilabo - 17302Esthefany Huayanay EscandonAún no hay calificaciones
- Tarea 1 - Nelson CepedaDocumento10 páginasTarea 1 - Nelson Cepedaangi baronAún no hay calificaciones
- Taller Del Módulo No.1 - Grupo HDocumento6 páginasTaller Del Módulo No.1 - Grupo Hjose peñalbaAún no hay calificaciones
- Guía Semestral Info IIDocumento8 páginasGuía Semestral Info IIAntonio B.Aún no hay calificaciones
- Guia 1 Digitales 1Documento5 páginasGuia 1 Digitales 1Juan Manuel RodríguezAún no hay calificaciones
- Guía de Práctica-Semana 5 SDocumento10 páginasGuía de Práctica-Semana 5 SKukin Erik Usquiano UscuvilcaAún no hay calificaciones
- SilaboDocumento7 páginasSilaboFrank Tesen VilelaAún no hay calificaciones
- SyllabusDocumento27 páginasSyllabusmiriam mabelAún no hay calificaciones
- Cultura Digital I: Lista de Cotejo: Cd23 - P08 - Lc01Documento1 páginaCultura Digital I: Lista de Cotejo: Cd23 - P08 - Lc01Natalia Nazario CervantesAún no hay calificaciones
- Matematica Superior TodoDocumento6 páginasMatematica Superior TodoDavidTAún no hay calificaciones
- Rúbrica Vra Fisica I Martinez Meneses LurdesDocumento1 páginaRúbrica Vra Fisica I Martinez Meneses LurdesRonny VilcaAún no hay calificaciones
- PLAN MICROCURRICULAR - ECUACIONES DIFERENCIALES (2021-2022) VirtualDocumento16 páginasPLAN MICROCURRICULAR - ECUACIONES DIFERENCIALES (2021-2022) VirtualElvis LlanesAún no hay calificaciones
- Once 2024 IiDocumento26 páginasOnce 2024 IiOSCAR APACHEAún no hay calificaciones
- Practica3 B3 SYS 2024Documento14 páginasPractica3 B3 SYS 2024gustavo.delarosa.enp5.987Aún no hay calificaciones
- Actividad 7. SucesionesDocumento6 páginasActividad 7. SucesionesledesmaAún no hay calificaciones
- 2016 GP Introduccion Analisis Respuesta GuevaraDocumento15 páginas2016 GP Introduccion Analisis Respuesta GuevaraJunior SottoAún no hay calificaciones
- Mapa de Recursos para Software Gestion EscolarDocumento35 páginasMapa de Recursos para Software Gestion EscolarnelsoncorreaAún no hay calificaciones
- Modulo Nuevo 2021Documento87 páginasModulo Nuevo 2021maria salinasAún no hay calificaciones
- #Mundo VerdeDocumento32 páginas#Mundo VerdeDiana Cecilia MoralesAún no hay calificaciones
- 5343 - Ciclo I - Taller de ProgramaciónDocumento17 páginas5343 - Ciclo I - Taller de ProgramaciónAngel b11Aún no hay calificaciones
- Unidad de Aprendizaje Ept ComputacionDocumento3 páginasUnidad de Aprendizaje Ept ComputacionCesar ROA GONZALESAún no hay calificaciones
- Programa SA OnlineDocumento2 páginasPrograma SA OnlineDavid Almagro CaballeroAún no hay calificaciones
- Tres Clases Sobre ECRODocumento39 páginasTres Clases Sobre ECROJuanchi HorñiacekAún no hay calificaciones
- EXAMEN QUIMESTRE AtaDocumento2 páginasEXAMEN QUIMESTRE AtaRicardo HidalgoAún no hay calificaciones
- RUC (Ecuador)Documento4 páginasRUC (Ecuador)Xavier QuitoAún no hay calificaciones
- Educarchile - Calor y TemperaturaDocumento6 páginasEducarchile - Calor y TemperaturaAnonymous ZzOvFQAún no hay calificaciones
- Mapa Teorias Del Control MotorDocumento1 páginaMapa Teorias Del Control MotorGraciela Rosario Guija RodriguezAún no hay calificaciones
- CV RomeliaDocumento2 páginasCV RomeliaEdduMedinaChumaceroAún no hay calificaciones
- 1 CONTENIDO Tclo 1° EQR OCTDocumento13 páginas1 CONTENIDO Tclo 1° EQR OCTJ Gabriel H. FloresAún no hay calificaciones
- Lectura Sobre La Seleccion de Recursos Humanos Jlts - 2021-I JltsDocumento8 páginasLectura Sobre La Seleccion de Recursos Humanos Jlts - 2021-I JltsYoselin FernándezAún no hay calificaciones
- IVU ActividaDocumento6 páginasIVU ActividaRaphael MTAún no hay calificaciones
- Tarea Carta de OttawaDocumento6 páginasTarea Carta de OttawaGhutzhayn MhoralesAún no hay calificaciones
- Guía de Actividades y Rúbrica de Evaluación - Unidad 1 - Tarea 2 - Paradigma de La Complejidad y Acción PsicosocialDocumento6 páginasGuía de Actividades y Rúbrica de Evaluación - Unidad 1 - Tarea 2 - Paradigma de La Complejidad y Acción Psicosocialsara valentina alvarado seguraAún no hay calificaciones
- Planilla La OpsuDocumento1 páginaPlanilla La OpsuJesus GuerreroAún no hay calificaciones
- Síndromes Asociados A Discapacidad IntelectualDocumento63 páginasSíndromes Asociados A Discapacidad Intelectualely.bayas100% (1)
- Bender TestDocumento2 páginasBender TestJessy Melgar100% (3)
- Necesidades Educativas Especiales Asociadas Al Medio AmbienteDocumento17 páginasNecesidades Educativas Especiales Asociadas Al Medio AmbienteLAndys Quintero100% (4)
- Aspecto Moral - Adulto MAyorDocumento32 páginasAspecto Moral - Adulto MAyorYajairaAún no hay calificaciones
- Informe Anonimo 3Documento3 páginasInforme Anonimo 3J Davi SalaAún no hay calificaciones
- PLAN Destrezas Con C. de D. Primero Unidad 1 20 - 21Documento5 páginasPLAN Destrezas Con C. de D. Primero Unidad 1 20 - 21Rubén RodasAún no hay calificaciones
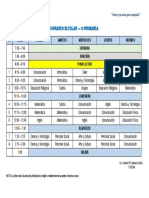
- Horario Escolar - 3º Primaria: #Hora Lunes Martes Miércoles Jueves Viernes Entrada Oración Plan LectorDocumento1 páginaHorario Escolar - 3º Primaria: #Hora Lunes Martes Miércoles Jueves Viernes Entrada Oración Plan LectorMaría Emilia Almonacin HuarcayaAún no hay calificaciones
- 8 Al 12 Noviembre 1°-2° Sec. Sesion 4-Exp.8-EptDocumento5 páginas8 Al 12 Noviembre 1°-2° Sec. Sesion 4-Exp.8-EptZOILA GINA VILLANUEVA HORNAAún no hay calificaciones
- Cotejo Cuestionario U3a1Documento4 páginasCotejo Cuestionario U3a1Omar JimenezAún no hay calificaciones
- Los 6 Tipos de Escritores Según Ezra PoundDocumento3 páginasLos 6 Tipos de Escritores Según Ezra PoundLEONEL RIVERAAún no hay calificaciones
- Hacia Mi Proyecto de VidaDocumento5 páginasHacia Mi Proyecto de Vidasandra cetinaAún no hay calificaciones
- Cun Pae 2020b S Administracion Publica 1036 1037Documento8 páginasCun Pae 2020b S Administracion Publica 1036 1037Ana Maria Hernandez OchoaAún no hay calificaciones
- El Tao de la física: Una exploración de los paralelismos entre la física moderna y el misticismo orientalDe EverandEl Tao de la física: Una exploración de los paralelismos entre la física moderna y el misticismo orientalCalificación: 5 de 5 estrellas5/5 (3)
- Mentalidades matemáticas: Cómo liberar el potencial de los estudiantes mediante las matemáticas creativas, mensajes inspiradores y una enseñanza innovadoraDe EverandMentalidades matemáticas: Cómo liberar el potencial de los estudiantes mediante las matemáticas creativas, mensajes inspiradores y una enseñanza innovadoraCalificación: 4.5 de 5 estrellas4.5/5 (5)
- Didáctica de la matemática en la escuela primariaDe EverandDidáctica de la matemática en la escuela primariaCalificación: 2.5 de 5 estrellas2.5/5 (3)
- Los mágicos números del Doctor Matrix: Conviértete en un maestro de los númerosDe EverandLos mágicos números del Doctor Matrix: Conviértete en un maestro de los númerosCalificación: 5 de 5 estrellas5/5 (2)
- Enseñar Matemática hoy: Miradas, sentidos y desafíosDe EverandEnseñar Matemática hoy: Miradas, sentidos y desafíosCalificación: 5 de 5 estrellas5/5 (1)
- La Teoría de Conjuntos y los Fundamentos de las MatemáticasDe EverandLa Teoría de Conjuntos y los Fundamentos de las MatemáticasCalificación: 5 de 5 estrellas5/5 (1)
- Física cuántica para principiantes: Descubra los fundamentos de la mecánica cuántica y cómo afecta al mundo en que vivimos a través de todas sus teorías más famosasDe EverandFísica cuántica para principiantes: Descubra los fundamentos de la mecánica cuántica y cómo afecta al mundo en que vivimos a través de todas sus teorías más famosasCalificación: 5 de 5 estrellas5/5 (4)
- La Biblia de las Matemáticas RápidasDe EverandLa Biblia de las Matemáticas RápidasCalificación: 4.5 de 5 estrellas4.5/5 (19)
- Fisicoquímica II: Materia, electricidad y magnetismo. Fuerzas y camposDe EverandFisicoquímica II: Materia, electricidad y magnetismo. Fuerzas y camposAún no hay calificaciones
- El método de los elementos finitos: Un enfoque teórico prácticoDe EverandEl método de los elementos finitos: Un enfoque teórico prácticoCalificación: 3 de 5 estrellas3/5 (4)
- Guía práctica para la refracción ocularDe EverandGuía práctica para la refracción ocularCalificación: 5 de 5 estrellas5/5 (2)
- Mi proyecto escolar Matemáticas Lúdicas: Adaptaciones curriculares para preescolar, primaria y secundariaDe EverandMi proyecto escolar Matemáticas Lúdicas: Adaptaciones curriculares para preescolar, primaria y secundariaCalificación: 5 de 5 estrellas5/5 (5)
- NIKOLA TESLA: Mis Inventos - AutobiografiaDe EverandNIKOLA TESLA: Mis Inventos - AutobiografiaCalificación: 4.5 de 5 estrellas4.5/5 (2)
- Matemáticas financierasDe EverandMatemáticas financierasCalificación: 4 de 5 estrellas4/5 (7)
- Física paso a paso: Más de 100 problemas resueltosDe EverandFísica paso a paso: Más de 100 problemas resueltosCalificación: 4 de 5 estrellas4/5 (12)
- Estadística básica: Introducción a la estadística con RDe EverandEstadística básica: Introducción a la estadística con RCalificación: 5 de 5 estrellas5/5 (8)
- El cerebro matemático: Cómo nacen, viven y a veces mueren los números en nuestra menteDe EverandEl cerebro matemático: Cómo nacen, viven y a veces mueren los números en nuestra menteCalificación: 4 de 5 estrellas4/5 (5)
- Sanación por Cristales - La guía definitiva para principiantes: Descubre el poder de los cristales curativos, piedras y minerales para la salud y la felicidadDe EverandSanación por Cristales - La guía definitiva para principiantes: Descubre el poder de los cristales curativos, piedras y minerales para la salud y la felicidadCalificación: 4.5 de 5 estrellas4.5/5 (14)
- Visualización: Cambie su vida en cuatro semanas utilizando la ley de atracciónDe EverandVisualización: Cambie su vida en cuatro semanas utilizando la ley de atracciónCalificación: 5 de 5 estrellas5/5 (18)
- Álgebra lineal aplicada a las ciencias económicas 2edDe EverandÁlgebra lineal aplicada a las ciencias económicas 2edCalificación: 4 de 5 estrellas4/5 (1)
- Cálculo integral: Técnicas de integraciónDe EverandCálculo integral: Técnicas de integraciónCalificación: 4 de 5 estrellas4/5 (8)
- Armónicas en Sistemas Eléctricos IndustrialesDe EverandArmónicas en Sistemas Eléctricos IndustrialesCalificación: 4.5 de 5 estrellas4.5/5 (12)