También podría gustarte
- Tarea11Maq Split MergeDocumento5 páginasTarea11Maq Split MergeIsrael GilAún no hay calificaciones
- Informe Aparatos Instrumentos de Medición ElectricaDocumento6 páginasInforme Aparatos Instrumentos de Medición ElectricaCramer Gonzales ElgueraAún no hay calificaciones
- Motor Shunt Pract4Documento9 páginasMotor Shunt Pract4fersita_oñate0% (1)
- Laboratorio 8Documento15 páginasLaboratorio 8Gherson D. Toro MelendrezAún no hay calificaciones
- LAB 03 CITRO1 Curva Diodo PDFDocumento3 páginasLAB 03 CITRO1 Curva Diodo PDFTomoyoKisekoAún no hay calificaciones
- Epi Laboratorio Citro B Huaman Chacca Alex 8Documento8 páginasEpi Laboratorio Citro B Huaman Chacca Alex 8Steep HacheAún no hay calificaciones
- El ConmutadorDocumento7 páginasEl ConmutadorMateo Benavides MartinezAún no hay calificaciones
- Informe 02 Máquinas Eléctricas-1Documento13 páginasInforme 02 Máquinas Eléctricas-1Maurice LopezAún no hay calificaciones
- Manual de Problemas de FÃ SicaDocumento9 páginasManual de Problemas de FÃ SicaSte blablaAún no hay calificaciones
- Fasores Mallas y NodosDocumento16 páginasFasores Mallas y Nodosgianmarco suniaquimaAún no hay calificaciones
- Práctica 3Documento19 páginasPráctica 3Renato Beltran CaceresAún no hay calificaciones
- Laboratorio Electroneumatica-G5Documento4 páginasLaboratorio Electroneumatica-G5Jhon Taylor Usma HurtadoAún no hay calificaciones
- Practica N°8 Chambi Lizarraga Pablo RobertoDocumento10 páginasPractica N°8 Chambi Lizarraga Pablo RobertoPablo RobertoAún no hay calificaciones
- Dinamica de Las Maquinas ElectricasDocumento7 páginasDinamica de Las Maquinas Electricasjuanelo1988Aún no hay calificaciones
- Transformadores Monofásicos y AutotransformadoresDocumento10 páginasTransformadores Monofásicos y AutotransformadoresJuan CisnerosAún no hay calificaciones
- Medida de Reactancia InductivaDocumento10 páginasMedida de Reactancia InductivaJhon CarreraAún no hay calificaciones
- Labora 2 Final CIRCUITOS ELECTRICOS 2 UNACDocumento10 páginasLabora 2 Final CIRCUITOS ELECTRICOS 2 UNACMarcos AlejoAún no hay calificaciones
- 13lineas Medias (Ejercicios)Documento7 páginas13lineas Medias (Ejercicios)B David Street SkateAún no hay calificaciones
- Análisis de Voltaje de Flameo Crítico (CFO) A Estructuras Del Estándar 66-E-2001 para La Construcción de Líneas Aéreas de El Salvador-Con Observaciones PDFDocumento140 páginasAnálisis de Voltaje de Flameo Crítico (CFO) A Estructuras Del Estándar 66-E-2001 para La Construcción de Líneas Aéreas de El Salvador-Con Observaciones PDFfranciscoAún no hay calificaciones
- Istrumentacion ElectricaDocumento3 páginasIstrumentacion Electricamichael chamorroAún no hay calificaciones
- Silabo Instalaciones Electricas I - IMO6R1 PDFDocumento8 páginasSilabo Instalaciones Electricas I - IMO6R1 PDFFreemanAún no hay calificaciones
- Taller Femm Maquinas ElectricasDocumento5 páginasTaller Femm Maquinas ElectricasErika EcheverryAún no hay calificaciones
- Practica 4 Maquinas SincronasDocumento8 páginasPractica 4 Maquinas SincronasDaxterMancerAún no hay calificaciones
- ET-Solar - 320WDocumento2 páginasET-Solar - 320Wreivin27Aún no hay calificaciones
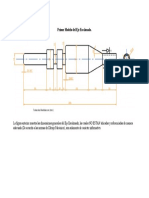
- Primer Modelo Del Eje EscalonadoDocumento1 páginaPrimer Modelo Del Eje EscalonadoJose Nicolas Tautiva ContrerasAún no hay calificaciones
- CE3 Laboratorio #5 - Conexion Estrella y Delta Usando LVsimDocumento3 páginasCE3 Laboratorio #5 - Conexion Estrella y Delta Usando LVsimEdgar VasquezAún no hay calificaciones
- INFORME #16 - Circuito Arrancador SuaveDocumento14 páginasINFORME #16 - Circuito Arrancador SuaveLuis Angel MercadoAún no hay calificaciones
- Informe 5Documento10 páginasInforme 5CarlosCaracelaMinayaAún no hay calificaciones
- Examen de Entrada de IEDocumento5 páginasExamen de Entrada de IEAaron UrquiagaAún no hay calificaciones
- Laboratorio N°13-Maquinas ElectricasDocumento12 páginasLaboratorio N°13-Maquinas Electricasnelson sevillano zuñigaAún no hay calificaciones
- Medida Del Factor de PotenciaDocumento6 páginasMedida Del Factor de PotenciaFranz AirojamamaniAún no hay calificaciones
- Dimensionamiento de Conductor Principal para MotorDocumento12 páginasDimensionamiento de Conductor Principal para MotorJC CamposAún no hay calificaciones
- Cee-4 JoDocumento77 páginasCee-4 JoDiego ValdiviezoAún no hay calificaciones
- Termodinámica II - Quiz 2 - G9 PDFDocumento1 páginaTermodinámica II - Quiz 2 - G9 PDFDaniel Felipe Polo GarcíaAún no hay calificaciones
- Análisis de Mallas para ExamenDocumento34 páginasAnálisis de Mallas para ExamenLenin Torres PalaciosAún no hay calificaciones
- Circuito Temporizador Con Amplificador OperacionalDocumento15 páginasCircuito Temporizador Con Amplificador OperacionalAna Gómez AlfonsoAún no hay calificaciones
- Motor Con Arranque Por CondensadorDocumento5 páginasMotor Con Arranque Por CondensadorRenzo DezaAún no hay calificaciones
- Intercambiadores de CalorDocumento3 páginasIntercambiadores de CalorTR JavierAún no hay calificaciones
- Informe de Maquinas Jaula de ArdillaDocumento9 páginasInforme de Maquinas Jaula de ArdillaCristian GuanoquizaAún no hay calificaciones
- El Transformador Monofásico - UTPDocumento12 páginasEl Transformador Monofásico - UTPMikío Antonio Sánchez Achurra100% (1)
- Motor CC Con Excitación IndependienteDocumento11 páginasMotor CC Con Excitación IndependienteJesus Rosas MontalvoAún no hay calificaciones
- Tarea #3Documento2 páginasTarea #3Dan VargasAún no hay calificaciones
- Informe 3Documento11 páginasInforme 3Franciss Barrios VelardeAún no hay calificaciones
- Laboratorio N10 UnprgDocumento20 páginasLaboratorio N10 UnprgEduardo SandovalAún no hay calificaciones
- FinalDocumento14 páginasFinalmeoviedo2004Aún no hay calificaciones
- Lab1 Caracteristicas Del FETDocumento6 páginasLab1 Caracteristicas Del FETSergioEstevezAún no hay calificaciones
- Reporte #1 (Octubre de 2021)Documento25 páginasReporte #1 (Octubre de 2021)Daniel RamirezAún no hay calificaciones
- Laboratorio 4 Maq 1 PDFDocumento10 páginasLaboratorio 4 Maq 1 PDFMario Alberto Molina PandiaAún no hay calificaciones
- UntitledDocumento6 páginasUntitledJonathanAún no hay calificaciones
- Entrega 1 - Lab 8 - Amplificadores OperacionalesDocumento7 páginasEntrega 1 - Lab 8 - Amplificadores OperacionalesNelson David Higuera UribeAún no hay calificaciones
- 2do Taller - Sistemas de Control ContinuoDocumento9 páginas2do Taller - Sistemas de Control ContinuojagcomezAún no hay calificaciones
- Practica N°4 Circuitos ElectricosDocumento5 páginasPractica N°4 Circuitos ElectricoscarlosAún no hay calificaciones
- Actividad 15Documento4 páginasActividad 15jesus oliveraAún no hay calificaciones
- Movimiento Absoluto y Relativo en TurbomaquinasDocumento5 páginasMovimiento Absoluto y Relativo en Turbomaquinasdongato860% (1)
- Lab. Análisis de Circuitos Eléctricos 2 Experiencia N 3: Desfasamiento de Ondas SenoidalesDocumento17 páginasLab. Análisis de Circuitos Eléctricos 2 Experiencia N 3: Desfasamiento de Ondas SenoidalesDhante QuiñonesAún no hay calificaciones
- Practica IDocumento18 páginasPractica IFernando HinojosaAún no hay calificaciones
- Laboratorio3 MEDIDA DE LA IMPEDANCIADocumento26 páginasLaboratorio3 MEDIDA DE LA IMPEDANCIAxd S:Aún no hay calificaciones
- Informe de Laboratorio 3Documento9 páginasInforme de Laboratorio 3David JanampaAún no hay calificaciones
- Circuitos ElectroneumaticosDocumento6 páginasCircuitos ElectroneumaticosKlever QuishpilloAún no hay calificaciones
- Informe Electro Neumatica BasicaDocumento3 páginasInforme Electro Neumatica Basicaborre_alex_862712775Aún no hay calificaciones
- Resortes TablasDocumento2 páginasResortes TablasWILLIAM JAVIER LEONARDO CONDEAún no hay calificaciones
- Capitulo IVDocumento3 páginasCapitulo IVWILLIAM JAVIER LEONARDO CONDEAún no hay calificaciones
- Análisis de Posicionamiento Del Mecanismo 2023Documento9 páginasAnálisis de Posicionamiento Del Mecanismo 2023WILLIAM JAVIER LEONARDO CONDEAún no hay calificaciones
- ANTECEDENTESDocumento2 páginasANTECEDENTESWILLIAM JAVIER LEONARDO CONDEAún no hay calificaciones
- FOTOELASTICIDADDocumento20 páginasFOTOELASTICIDADWILLIAM JAVIER LEONARDO CONDEAún no hay calificaciones
- Sesión 29 - REC29 (Funciones Estadisticas)Documento7 páginasSesión 29 - REC29 (Funciones Estadisticas)WILLIAM JAVIER LEONARDO CONDEAún no hay calificaciones
- Practica Calificada 2Documento7 páginasPractica Calificada 2WILLIAM JAVIER LEONARDO CONDE100% (1)
- Minimos CuadradosDocumento25 páginasMinimos CuadradosWILLIAM JAVIER LEONARDO CONDEAún no hay calificaciones
- Cómo Funciona Un CMMSDocumento3 páginasCómo Funciona Un CMMSWILLIAM JAVIER LEONARDO CONDEAún no hay calificaciones
- Practica CalificadaDocumento2 páginasPractica CalificadaWILLIAM JAVIER LEONARDO CONDEAún no hay calificaciones
- Resumen de Los Videos. 2022-IDocumento2 páginasResumen de Los Videos. 2022-IWILLIAM JAVIER LEONARDO CONDEAún no hay calificaciones
- Ejercicios - Graficos en ExcelDocumento10 páginasEjercicios - Graficos en ExcelWILLIAM JAVIER LEONARDO CONDEAún no hay calificaciones
- Mineria Cerro VerdeDocumento19 páginasMineria Cerro VerdeWILLIAM JAVIER LEONARDO CONDEAún no hay calificaciones
- Cap. 7Documento5 páginasCap. 7WILLIAM JAVIER LEONARDO CONDEAún no hay calificaciones
- Primer TrabajoDocumento17 páginasPrimer TrabajoWILLIAM JAVIER LEONARDO CONDEAún no hay calificaciones
- Ejercicio - de Aplicacion - ChebyshevDocumento5 páginasEjercicio - de Aplicacion - ChebyshevWILLIAM JAVIER LEONARDO CONDEAún no hay calificaciones
- Trabajo Final Ing. de ControlDocumento12 páginasTrabajo Final Ing. de ControlWILLIAM JAVIER LEONARDO CONDEAún no hay calificaciones
- Avance de Proyecto - ZzzlipDocumento5 páginasAvance de Proyecto - ZzzlipGUY ANTOINE TENOPALA FERNANDEZAún no hay calificaciones
- SISTEMA DE CONTROL GUBERNAMENTAL BoliviaDocumento54 páginasSISTEMA DE CONTROL GUBERNAMENTAL BoliviaAngel Mollinedo100% (7)
- Memorias Pamplonita V - 3Documento89 páginasMemorias Pamplonita V - 3william perezAún no hay calificaciones
- Ciclo Iii Primaria CuestionarioDocumento13 páginasCiclo Iii Primaria Cuestionarioyulita2013Aún no hay calificaciones
- Evaluación de Un Mapa TopográficoDocumento36 páginasEvaluación de Un Mapa TopográficoJHON HÉCTOR AGUIRRE GRAJALESAún no hay calificaciones
- Técnicas Modificación ConductaDocumento2 páginasTécnicas Modificación ConductaVero Becerril100% (1)
- DEC570 Cap73-85Documento95 páginasDEC570 Cap73-85202 pru1Aún no hay calificaciones
- Aguilar Garcia Jorge Antonio - Inteligencia EmocionalDocumento8 páginasAguilar Garcia Jorge Antonio - Inteligencia EmocionalJorge Antonio Aguilar GarcíaAún no hay calificaciones
- C N C X CDocumento19 páginasC N C X Cluis chonilloAún no hay calificaciones
- HitlerDocumento5 páginasHitlerPaco FernandezAún no hay calificaciones
- Tema 8: Fusión Y Colada: Ciencia de Materiales IiDocumento20 páginasTema 8: Fusión Y Colada: Ciencia de Materiales IipedroAún no hay calificaciones
- Guia de Estudio Psicologia Del DesarrolloDocumento14 páginasGuia de Estudio Psicologia Del DesarrolloWelber LainezAún no hay calificaciones
- Escrito EconomiaDocumento2 páginasEscrito EconomiaValentín RomeroAún no hay calificaciones
- La Oración: Su Naturaleza y Su TécnicaDocumento110 páginasLa Oración: Su Naturaleza y Su TécnicaSant_Mat_eBooks100% (3)
- FIS129-Física 1-2014-1Documento177 páginasFIS129-Física 1-2014-1Martin Rivas MazuelosAún no hay calificaciones
- Ecologia 2021Documento30 páginasEcologia 2021ISABEL MMAún no hay calificaciones
- 1°PREGUNTAS MetodologiaDocumento2 páginas1°PREGUNTAS MetodologiaJoe wilson Huaman alburquequeAún no hay calificaciones
- Actividad 2Documento4 páginasActividad 2ana kmeloAún no hay calificaciones
- Hoevel - 5 Ejes de Una Educación PersonalistaDocumento7 páginasHoevel - 5 Ejes de Una Educación PersonalistaFlorencia BaezAún no hay calificaciones
- Conservacion de La EnergìaDocumento5 páginasConservacion de La EnergìaMariaAún no hay calificaciones
- Guia 02 GUION de VIDEO DOCUMENTAL Catedra - Final - 5-4-20Documento6 páginasGuia 02 GUION de VIDEO DOCUMENTAL Catedra - Final - 5-4-20Griss Palma ChuqueAún no hay calificaciones
- Guia - 5 - Hecho y OpiniónDocumento3 páginasGuia - 5 - Hecho y OpiniónGabriela Andrea Arévalo VargasAún no hay calificaciones
- Clasificador Nacional de Ocupaciones 2015-I PDFDocumento494 páginasClasificador Nacional de Ocupaciones 2015-I PDFdayper peru20Aún no hay calificaciones
- Unidad 1.3 TIPOS DE LOGÍSTICA PlataformaDocumento35 páginasUnidad 1.3 TIPOS DE LOGÍSTICA PlataformaChris VélezAún no hay calificaciones
- Pia Parte IndividualDocumento9 páginasPia Parte IndividualMarco SotoAún no hay calificaciones
- Memoria DescriptivaDocumento74 páginasMemoria DescriptivaJesus CaceresAún no hay calificaciones
- Manigot CoordinadorDocumento8 páginasManigot CoordinadorNicolás BrignoliAún no hay calificaciones
- 8 Sistema de CombustibleDocumento30 páginas8 Sistema de CombustiblekmiloAún no hay calificaciones
- Ficha Sem 5 CCSS 2doDocumento3 páginasFicha Sem 5 CCSS 2doVale RengifoAún no hay calificaciones
- Informe Introduccion Ing SanitariaDocumento12 páginasInforme Introduccion Ing Sanitariamaribel herrera ramirezAún no hay calificaciones