También podría gustarte
- UF0572 - Instalaciones eficientes de suministro de agua y saneamiento en edificiosDe EverandUF0572 - Instalaciones eficientes de suministro de agua y saneamiento en edificiosCalificación: 4 de 5 estrellas4/5 (4)
- Instrumentación y control en instalaciones de proceso, energía y servicios auxiliares. QUIE0108De EverandInstrumentación y control en instalaciones de proceso, energía y servicios auxiliares. QUIE0108Calificación: 4.5 de 5 estrellas4.5/5 (8)
- Reporte U4 Control de MotoresDocumento9 páginasReporte U4 Control de MotoresKáros VerheerendAún no hay calificaciones
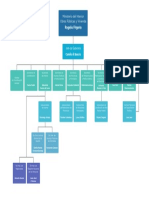
- Organigrama Ministerio Del Interior 1 - ARGENTINADocumento1 páginaOrganigrama Ministerio Del Interior 1 - ARGENTINAdaniel muñozAún no hay calificaciones
- Sensor de Nivel de LiquidosDocumento31 páginasSensor de Nivel de LiquidosCarlos J Duran ForeAún no hay calificaciones
- Control de Taqnue 2Documento10 páginasControl de Taqnue 2Juan ChunaAún no hay calificaciones
- Control ON-OFF Tanque de Nivel - Rojo - Tapia - Hernández - Escobar - ReinaDocumento17 páginasControl ON-OFF Tanque de Nivel - Rojo - Tapia - Hernández - Escobar - Reinaxhmv6ygt4hAún no hay calificaciones
- MicrocontroladoresDocumento25 páginasMicrocontroladoresLudwing Iturbe Ortiz100% (2)
- Control Automático para Un Depósito de AguaDocumento11 páginasControl Automático para Un Depósito de AguaOscar Javier RojasAún no hay calificaciones
- Control Automático para Un Depósito de AguaDocumento11 páginasControl Automático para Un Depósito de AguaAnonymous h70HWuAún no hay calificaciones
- Informe Control Automatico (Planta)Documento6 páginasInforme Control Automatico (Planta)Carlin BabuchasAún no hay calificaciones
- Control ComputarizadoDocumento9 páginasControl ComputarizadoOsvaldo ReynaAún no hay calificaciones
- Metodo de Criterios de Ajuste para La EsDocumento13 páginasMetodo de Criterios de Ajuste para La EsLuiz PipinoAún no hay calificaciones
- Informe Diseño de Un Sistema de Control de NivelDocumento4 páginasInforme Diseño de Un Sistema de Control de NivellimbergAún no hay calificaciones
- Reporte Práctica 2 Manuel 8BM1Documento5 páginasReporte Práctica 2 Manuel 8BM1Alex AuditoreAún no hay calificaciones
- Laboratorio 1 - Sistemas Industriales ComplejosDocumento10 páginasLaboratorio 1 - Sistemas Industriales ComplejosMaycol Manuel Rojas VenturaAún no hay calificaciones
- Sistema de Control de Nivel de Tanques Acoplados - Control AutomaticoDocumento21 páginasSistema de Control de Nivel de Tanques Acoplados - Control AutomaticoPol CardenasAún no hay calificaciones
- Informe Nº3 Control de Nivel en Un TanqueDocumento10 páginasInforme Nº3 Control de Nivel en Un TanqueDC Jean100% (1)
- Indicador de Nivel de LiquidosDocumento13 páginasIndicador de Nivel de Liquidospereyra medina Ivette del rosarioAún no hay calificaciones
- Fluidos en Movimiento Dentro de Un ProcesoDocumento8 páginasFluidos en Movimiento Dentro de Un ProcesoChristian PlascenciaAún no hay calificaciones
- Informe de InstrumentacionDocumento5 páginasInforme de Instrumentacionzuleimys delgado coronadoAún no hay calificaciones
- Practica 6 - JRDDocumento6 páginasPractica 6 - JRDCesar GonzalezAún no hay calificaciones
- Memoria FinalDocumento48 páginasMemoria FinalEdinson Javier Gallego HerreraAún no hay calificaciones
- Sistema de Control 2Documento6 páginasSistema de Control 2Duberly ValerioAún no hay calificaciones
- Solucion Actividad Central U2Documento7 páginasSolucion Actividad Central U2Alex Loboa CortesAún no hay calificaciones
- Proyecto Control de Nivel de AguaDocumento3 páginasProyecto Control de Nivel de AguaDelany Vargas CallataAún no hay calificaciones
- LED y Fototransistor Infrarrojos TIL32 y TIL78Documento6 páginasLED y Fototransistor Infrarrojos TIL32 y TIL78FranciscoEndaraAún no hay calificaciones
- Control Automatico Deposito AguaDocumento14 páginasControl Automatico Deposito AguaJoselRoAún no hay calificaciones
- Wa0002.Documento8 páginasWa0002.GabyAún no hay calificaciones
- Sistema Control Nivel de Agua en Tanque de AlmacenamientoDocumento4 páginasSistema Control Nivel de Agua en Tanque de Almacenamientojaime albertoAún no hay calificaciones
- Memoria Proyecto Control Cisterna y Tanque Con ZelioDocumento6 páginasMemoria Proyecto Control Cisterna y Tanque Con ZelioErnesto Tolocka100% (3)
- Controlar El Nivel de Un Tanque Con Un PIC A Través de IOTDocumento11 páginasControlar El Nivel de Un Tanque Con Un PIC A Través de IOTBaki HanmaAún no hay calificaciones
- Evaluacion de ConocimientosDocumento26 páginasEvaluacion de ConocimientosSEBASTIAN VELEZ OSPINAAún no hay calificaciones
- Tanque de Almacenamiento ExamenDocumento2 páginasTanque de Almacenamiento ExamenDIEGO FARID CORDOVA ROMEROAún no hay calificaciones
- Glab S04 Ejimeno 2018 01 FDocumento8 páginasGlab S04 Ejimeno 2018 01 FAlejandro Alfaro MontoyaAún no hay calificaciones
- Laboratorio de Instrumentación N.1Documento16 páginasLaboratorio de Instrumentación N.1Viviana ZuluagaAún no hay calificaciones
- Control Planta en LabviewDocumento4 páginasControl Planta en LabviewJAVIER ALONSO MURILLO MURILLOAún no hay calificaciones
- T2298Documento149 páginasT2298Bebedmi Yviviras EternamenteAún no hay calificaciones
- Sistemas de Control2 - Control6Documento7 páginasSistemas de Control2 - Control6Emilio ContrerasAún no hay calificaciones
- Informe Fundamentos de AutomatizacionDocumento13 páginasInforme Fundamentos de AutomatizacionLinamaría ArdilaAún no hay calificaciones
- PROYECTO Control de Nivel de LiquidoDocumento46 páginasPROYECTO Control de Nivel de Liquidodilmer garcia100% (1)
- Modulo Control NivelDocumento6 páginasModulo Control NivelFabio SotoAún no hay calificaciones
- Instrumentacion y Control LAB1Documento7 páginasInstrumentacion y Control LAB1Cesar BencomoAún no hay calificaciones
- Trabajo de DerflingerDocumento13 páginasTrabajo de DerflingerJosue MejiaAún no hay calificaciones
- GLAB2023Documento8 páginasGLAB2023robert15151313Aún no hay calificaciones
- J Nuñez - Laboratorio 2 Irrigaciones Tanque EvaporimetroDocumento13 páginasJ Nuñez - Laboratorio 2 Irrigaciones Tanque EvaporimetroNuñez Allpocc Juan HenryAún no hay calificaciones
- Control Automático de Llenado y Vaciado de Tanque Con Ajuste de TemperaturaDocumento7 páginasControl Automático de Llenado y Vaciado de Tanque Con Ajuste de TemperaturaGeoDanAún no hay calificaciones
- Laboratorio FinalDocumento17 páginasLaboratorio FinalNelson SepulvedaAún no hay calificaciones
- Info-03 Modulo de Control de TemperaturaDocumento9 páginasInfo-03 Modulo de Control de TemperaturaLeo Jiménez MontesAún no hay calificaciones
- Sensores de NivelDocumento14 páginasSensores de NivelJosept Churqui CondoriAún no hay calificaciones
- Sistema de Medición de Nivel de Tanque de AguaDocumento8 páginasSistema de Medición de Nivel de Tanque de AguaMarco Antonio Pérez FernándezAún no hay calificaciones
- Control de Nivel de Un Tanque Con Programación VHDL en FPGADocumento5 páginasControl de Nivel de Un Tanque Con Programación VHDL en FPGA-LeDante-Aún no hay calificaciones
- Practica Lab de PLC - Reconocimiento (TwidoSuit)Documento9 páginasPractica Lab de PLC - Reconocimiento (TwidoSuit)fabiolajesAún no hay calificaciones
- Sensor de Nivel de Agua Con ArduinoDocumento29 páginasSensor de Nivel de Agua Con ArduinoPotterGamePlaysAún no hay calificaciones
- Parcial 01 ElectronicaDocumento1 páginaParcial 01 Electronicaarley7rAún no hay calificaciones
- Modelación Lineal de Un Tanque de NivelDocumento11 páginasModelación Lineal de Un Tanque de NivelToño Next IntelAún no hay calificaciones
- Práctica de Laboratorio #03 de Control ImprimrDocumento8 páginasPráctica de Laboratorio #03 de Control ImprimrJakelin EsquivelAún no hay calificaciones
- Llenado de Tanque WordddddDocumento9 páginasLlenado de Tanque WordddddJose TasaycoAún no hay calificaciones
- Garcia Coronado Aldryn ManuelDocumento12 páginasGarcia Coronado Aldryn ManuelAldryn Garcia CoronadoAún no hay calificaciones
- Problemas Capitulo 1 Introduccion A La MecatronicaDocumento3 páginasProblemas Capitulo 1 Introduccion A La MecatronicaJose Carlos Llerena VillenaAún no hay calificaciones
- Practica Del Accionamiento de Un Cilindro de Simple Efecto Mediante Una ElectrovalvulaDocumento35 páginasPractica Del Accionamiento de Un Cilindro de Simple Efecto Mediante Una ElectrovalvulaArturo Betancourt100% (2)
- Act. Modulacion de SistemasDocumento3 páginasAct. Modulacion de SistemasOscar BarrientosAún no hay calificaciones
- Tarea de L TEXDocumento3 páginasTarea de L TEXMarina IllescasAún no hay calificaciones
- Mate - BasicaDocumento3 páginasMate - BasicaMarina IllescasAún no hay calificaciones
- CaminareDocumento2 páginasCaminareMarina IllescasAún no hay calificaciones
- Angeles de DiosDocumento2 páginasAngeles de DiosMarina IllescasAún no hay calificaciones
- Practica 4 Capacitores y CapacitanciaDocumento4 páginasPractica 4 Capacitores y CapacitanciaMarina IllescasAún no hay calificaciones
- AGENDA EstadNegocios JulSep2013 BANDocumento9 páginasAGENDA EstadNegocios JulSep2013 BANRa LauAún no hay calificaciones
- Actividad Mircoles y Jueves 6,7 AbrilDocumento10 páginasActividad Mircoles y Jueves 6,7 AbrilYanetAún no hay calificaciones
- Kandy Frescia Cambio ApellidoDocumento6 páginasKandy Frescia Cambio Apellidowalter gomez tamayoAún no hay calificaciones
- Plantas Utiles de BailadoresDocumento27 páginasPlantas Utiles de Bailadoresveliger2009Aún no hay calificaciones
- Estructuray Mantenimiento GuitarraDocumento16 páginasEstructuray Mantenimiento GuitarraRafaelAún no hay calificaciones
- Glandula ParotidaDocumento2 páginasGlandula Parotidamaryroa77Aún no hay calificaciones
- Caso Esqueletos en El ArmarioDocumento2 páginasCaso Esqueletos en El ArmarioAlejandra Contreras0% (1)
- Presentacion DualidadDocumento37 páginasPresentacion Dualidadospiman0% (1)
- 2018-1 Guia1. Manejo de Instrumentos de MediciónDocumento3 páginas2018-1 Guia1. Manejo de Instrumentos de MediciónMiguel Angel Muñoz NopeAún no hay calificaciones
- AAAD - PROCESO - 18-21-7147 - 244430011 - 52164248 AdjucacionDocumento5 páginasAAAD - PROCESO - 18-21-7147 - 244430011 - 52164248 AdjucacionCarlos Enrique Murgas CarrilloAún no hay calificaciones
- Proyecto de Turismo Eco-Cultural para La Provincia de CatamarcaDocumento18 páginasProyecto de Turismo Eco-Cultural para La Provincia de CatamarcaGODISNOWHERE0% (1)
- MANUAL DE PRACTICAS PROFESIONALES (Versión Consejo Académico) 10-03-2021Documento14 páginasMANUAL DE PRACTICAS PROFESIONALES (Versión Consejo Académico) 10-03-2021Luis MendezAún no hay calificaciones
- Formato Igafom No Metalica PreventivoDocumento76 páginasFormato Igafom No Metalica PreventivoMonica Karina Arpe CalluchiAún no hay calificaciones
- Zazo - Migración de Aplicaciones Android Hacia Flutter, Un Framework para Desarrollo de Apps Mult...Documento78 páginasZazo - Migración de Aplicaciones Android Hacia Flutter, Un Framework para Desarrollo de Apps Mult...Giovanni CrossAún no hay calificaciones
- Manual SacrusDocumento12 páginasManual SacrusEdgar BlancasAún no hay calificaciones
- PINEARQ Diseño Habitaciones HospitalariasDocumento4 páginasPINEARQ Diseño Habitaciones HospitalariasLuis Eduardo Mata VillalbaAún no hay calificaciones
- Influencia de Las Peliculas Animadas de Disney en Los Niños de América Desde La Década de 1950 Hasta La Actualidad. UPC-PERUDocumento38 páginasInfluencia de Las Peliculas Animadas de Disney en Los Niños de América Desde La Década de 1950 Hasta La Actualidad. UPC-PERUDanielChipana67% (3)
- BronquiectasiaDocumento3 páginasBronquiectasiaalisson cuevasAún no hay calificaciones
- El Fichaje IsarDocumento25 páginasEl Fichaje IsarJhim Brandon Hidalgo PacayaAún no hay calificaciones
- S CNT 3Documento1 páginaS CNT 3NahuAún no hay calificaciones
- BARRENADODocumento7 páginasBARRENADODavid PichogagónAún no hay calificaciones
- Tabla ConcentraciónDocumento4 páginasTabla Concentraciónisaacineztroza86Aún no hay calificaciones
- La Pobre AnastasiaDocumento22 páginasLa Pobre AnastasiaAnita Pérez0% (1)
- Sistema de Tratamiento de Aguas Residuales Del ComplejoDocumento19 páginasSistema de Tratamiento de Aguas Residuales Del ComplejoJuan Carlos JimenezAún no hay calificaciones
- Actividades Finales de Repaso de Lengua (4) (2122)Documento3 páginasActividades Finales de Repaso de Lengua (4) (2122)Consuelo AbadAún no hay calificaciones
- El Contrato de TrabajoDocumento13 páginasEl Contrato de Trabajoalejandro lopezAún no hay calificaciones
- Guia de Actividades y Rúbrica de Evaluación - Paso 3 - Seleccionar Bibliografía Lingüística de La Lengua Escogida para Un Estado Del ArteDocumento9 páginasGuia de Actividades y Rúbrica de Evaluación - Paso 3 - Seleccionar Bibliografía Lingüística de La Lengua Escogida para Un Estado Del ArteisabelAún no hay calificaciones
- Requerimiento WilyDocumento4 páginasRequerimiento WilyRichard Condori LaricoAún no hay calificaciones