0% encontró este documento útil (0 votos)
3K vistas34 páginasHerramientas Matemáticas en Robótica Industrial
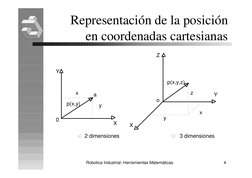
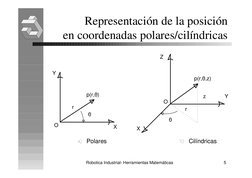
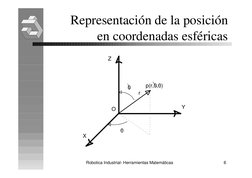
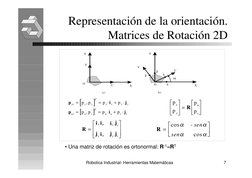
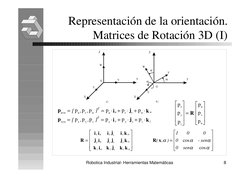
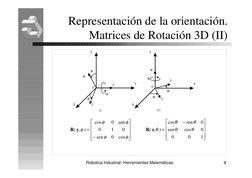
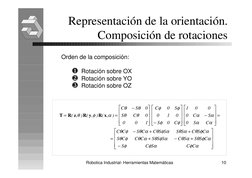
Este documento presenta diferentes herramientas matemáticas para representar la posición y orientación de robots industriales. Describe métodos como coordenadas cartesianas, polares y esféricas para especificar la posición, y el uso de matrices de rotación y ángulos de Euler para representar la orientación. También cubre conceptos como la composición de rotaciones y los ángulos de Roll, Pitch y Yaw.
Cargado por
Francisco ZalamancaDerechos de autor
© Attribution Non-Commercial (BY-NC)
Nos tomamos en serio los derechos de los contenidos. Si sospechas que se trata de tu contenido, reclámalo aquí.
Formatos disponibles
Descarga como PDF, TXT o lee en línea desde Scribd
0% encontró este documento útil (0 votos)
3K vistas34 páginasHerramientas Matemáticas en Robótica Industrial
Este documento presenta diferentes herramientas matemáticas para representar la posición y orientación de robots industriales. Describe métodos como coordenadas cartesianas, polares y esféricas para especificar la posición, y el uso de matrices de rotación y ángulos de Euler para representar la orientación. También cubre conceptos como la composición de rotaciones y los ángulos de Roll, Pitch y Yaw.
Cargado por
Francisco ZalamancaDerechos de autor
© Attribution Non-Commercial (BY-NC)
Nos tomamos en serio los derechos de los contenidos. Si sospechas que se trata de tu contenido, reclámalo aquí.
Formatos disponibles
Descarga como PDF, TXT o lee en línea desde Scribd