También podría gustarte
- ÁngulosFilosFuerzasCorteMetalDocumento8 páginasÁngulosFilosFuerzasCorteMetalAlejandro OsorioAún no hay calificaciones
- ÁngulosDocumento6 páginasÁngulosFranciscoDanielRamirezFloresAún no hay calificaciones
- Afilado de BurilesDocumento4 páginasAfilado de BurilesGrevy Oziel FloresAún no hay calificaciones
- F1 Procesos MecanizadoDocumento122 páginasF1 Procesos MecanizadoDiana m.Aún no hay calificaciones
- AFILADODocumento15 páginasAFILADOEdgar LopezAún no hay calificaciones
- Procesos de soldadura, clasificación y materialesDocumento8 páginasProcesos de soldadura, clasificación y materialesValentina MiraAún no hay calificaciones
- 2a-Htas Torno PDFDocumento61 páginas2a-Htas Torno PDFalejadro herreraAún no hay calificaciones
- Asignación Cohorte 2 Procesos de Fabricación 2020-2Documento7 páginasAsignación Cohorte 2 Procesos de Fabricación 2020-2MARCÜZAún no hay calificaciones
- Mecanismo de Formación de VirutaDocumento9 páginasMecanismo de Formación de VirutaRober Moises Chumbe SoveroAún no hay calificaciones
- Tecnicas de EstiradoDocumento14 páginasTecnicas de EstiradowilliamAún no hay calificaciones
- HTAS CNC-VL0-Herramientas de CorteDocumento95 páginasHTAS CNC-VL0-Herramientas de CorteRicardo Rincon VegaAún no hay calificaciones
- Actividad 2.1 Vel-Tiempo-CostoDocumento9 páginasActividad 2.1 Vel-Tiempo-Costoricardo olveraAún no hay calificaciones
- Basico de Programacion Torno CNC SenaDocumento63 páginasBasico de Programacion Torno CNC SenaMatematicas Yandun100% (1)
- Calculo de Corte y PotenciaDocumento14 páginasCalculo de Corte y Potenciagandresalmeidam100% (1)
- Htas CNC Vl0Documento105 páginasHtas CNC Vl0marubogaAún no hay calificaciones
- REFRENTADODocumento3 páginasREFRENTADOAlex0% (1)
- F1 Procesos MecanizadoDocumento122 páginasF1 Procesos MecanizadoYesica Viviana LesmesAún no hay calificaciones
- Teoria de CorteDocumento7 páginasTeoria de Cortetupapiyt2004Aún no hay calificaciones
- Parte Desarrollo: Tecnologia de Los Procesos de Manufactura - In179 Examen Final Ciclo 2020-02Documento6 páginasParte Desarrollo: Tecnologia de Los Procesos de Manufactura - In179 Examen Final Ciclo 2020-02アキラAún no hay calificaciones
- 22.10 Velocidad de CorteDocumento8 páginas22.10 Velocidad de CorteYordy sanchezAún no hay calificaciones
- 05 DH Diseño de TroquelesDocumento38 páginas05 DH Diseño de Troquelesdiegograff18Aún no hay calificaciones
- Esquema de La Cadena CinemáticaDocumento9 páginasEsquema de La Cadena CinemáticaMateo R. GallegoAún no hay calificaciones
- Desgaste de Herramienta9Documento10 páginasDesgaste de Herramienta9Luis FernandoAún no hay calificaciones
- Procesos de Manufactura - Examen Final IN179Documento6 páginasProcesos de Manufactura - Examen Final IN179Jean GonzalesAún no hay calificaciones
- Velocidad de corte óptima para máquinas herramientasDocumento6 páginasVelocidad de corte óptima para máquinas herramientasSuarez DavidAún no hay calificaciones
- Clases TaladroDocumento11 páginasClases TaladroAnto MoralesAún no hay calificaciones
- Informe Manufactura Final Ahora Si Que SiDocumento27 páginasInforme Manufactura Final Ahora Si Que SiLEONARDO ENRIQUE MENDEZ VALENCIAAún no hay calificaciones
- Semana 11 - Teoría - Procesos de MecanizadoDocumento55 páginasSemana 11 - Teoría - Procesos de MecanizadoDiego LeivaAún no hay calificaciones
- Separación por cuña - Tecnología de MaterialesDocumento38 páginasSeparación por cuña - Tecnología de MaterialesSofíaFiorellaToneChávezAún no hay calificaciones
- Corte PunzonadoDocumento7 páginasCorte PunzonadoCarlos NaranjoAún no hay calificaciones
- Paper Ansys Mecanizado2Documento8 páginasPaper Ansys Mecanizado2Diego MolinaAún no hay calificaciones
- Herramientas de CorteDocumento41 páginasHerramientas de CortejuanAún no hay calificaciones
- Unidad 4 Determinación de Fuerzas Y Potencias en Máquinas Herramientas Y Herramientas de CorteDocumento25 páginasUnidad 4 Determinación de Fuerzas Y Potencias en Máquinas Herramientas Y Herramientas de CorteFrank ManciaAún no hay calificaciones
- Refrentado e inserto torneadoDocumento2 páginasRefrentado e inserto torneadoalex carvajal50% (2)
- Afilado de Herramientas TornoDocumento6 páginasAfilado de Herramientas TornoFernando OchoaAún no hay calificaciones
- Máquinas herramienta: torno paraleloDocumento67 páginasMáquinas herramienta: torno paraleloMilton Patricio CajilemaAún no hay calificaciones
- ChavetaDocumento7 páginasChavetaCristóbal RiquelmeAún no hay calificaciones
- Determinación de duración de herramientasDocumento8 páginasDeterminación de duración de herramientasDaniel SanchezAún no hay calificaciones
- STLR 07 Heavy Duty Machining ESPDocumento56 páginasSTLR 07 Heavy Duty Machining ESPNhoj AicragAún no hay calificaciones
- Tabla de Contenidos DORMERDocumento144 páginasTabla de Contenidos DORMERPipe AriasAún no hay calificaciones
- Velocidad de Corte para Los Diferentes Materiales A Mecanizar (M/min)Documento4 páginasVelocidad de Corte para Los Diferentes Materiales A Mecanizar (M/min)Alejandro VegaAún no hay calificaciones
- Troqueleria Piezas A TrabajarDocumento27 páginasTroqueleria Piezas A TrabajarDuran PlacenciaAún no hay calificaciones
- Cálculo de Parámetros de Corte en FresadoDocumento5 páginasCálculo de Parámetros de Corte en FresadoChristopher OrtegaAún no hay calificaciones
- Informe MartilloDocumento17 páginasInforme Martilloerick9daniel9navarroAún no hay calificaciones
- Angulos de La CuchillaDocumento29 páginasAngulos de La CuchillaMiller MenaAún no hay calificaciones
- Clase10 2017Documento32 páginasClase10 2017MARIA PEREZAún no hay calificaciones
- Fórmulas y Definiciones de MecanizadoDocumento24 páginasFórmulas y Definiciones de MecanizadoCar Jav EspAún no hay calificaciones
- Mecanizado 4140 con TungstenoDocumento15 páginasMecanizado 4140 con TungstenoWilmar A. VillarragaAún no hay calificaciones
- Segundo Examen Parcial de Sistemas CadDocumento5 páginasSegundo Examen Parcial de Sistemas CadMaría GerónimoAún no hay calificaciones
- Herramentales FIME CNC 2019Documento10 páginasHerramentales FIME CNC 2019Luis Fernando Lorenzo HernandezAún no hay calificaciones
- 2.2 Selección de Herramientas y Parámetros de Corte Parte 1Documento50 páginas2.2 Selección de Herramientas y Parámetros de Corte Parte 1Tonatiuh Guzman aburtoAún no hay calificaciones
- Fresado HuberDocumento14 páginasFresado Huberhuber emmanuel duarte garciaAún no hay calificaciones
- Deduccion de Formulas de Fuerza y Potencia de TaladroDocumento20 páginasDeduccion de Formulas de Fuerza y Potencia de TaladroCarlos Galarza100% (2)
- 6 Trabajo Previo A MaquinadoDocumento13 páginas6 Trabajo Previo A MaquinadoDiego RodríguezAún no hay calificaciones
- Tecno .Digital ApuntesDocumento24 páginasTecno .Digital ApuntesJUANAún no hay calificaciones
- Mecanica Del Corte de Metales TeoriaDocumento9 páginasMecanica Del Corte de Metales TeoriaIsidro Rosales JeanAún no hay calificaciones
- Operaciones de máquinas-herramientas para punzonado y plegado. FMEH0209De EverandOperaciones de máquinas-herramientas para punzonado y plegado. FMEH0209Aún no hay calificaciones
- Dupeyron Odin Colorin Colorado Este Cuento Aun No Se Ha Acabado PDFDocumento80 páginasDupeyron Odin Colorin Colorado Este Cuento Aun No Se Ha Acabado PDFAngel Torres84% (49)
- La Mentira OriginalDocumento96 páginasLa Mentira OriginalLaia Toniolo VidalAún no hay calificaciones
- Tomo III Instalaciones Aire Acondicionado V 2.0Documento31 páginasTomo III Instalaciones Aire Acondicionado V 2.0chanclovvandameAún no hay calificaciones
- La Mentira OriginalDocumento96 páginasLa Mentira OriginalLaia Toniolo VidalAún no hay calificaciones
- Dupeyron Odin Colorin Colorado Este Cuento Aun No Se Ha Acabado PDFDocumento80 páginasDupeyron Odin Colorin Colorado Este Cuento Aun No Se Ha Acabado PDFAngel Torres84% (49)
- Brochure 2Documento9 páginasBrochure 2Jaime MontielAún no hay calificaciones
- Ingenieria Basica, de Detalle y ConecptualDocumento4 páginasIngenieria Basica, de Detalle y ConecptualJaime MontielAún no hay calificaciones
- Villacero ConduitDocumento6 páginasVillacero Conduitjamt85Aún no hay calificaciones
- Sistema Isometrico en AutocadDocumento27 páginasSistema Isometrico en Autocadedgardy21Aún no hay calificaciones
- Dimensionado Liras Expansión Con ExcelDocumento5 páginasDimensionado Liras Expansión Con ExcelArturo Roberto Avila100% (2)
- Sistemas de Gases MedicinalesDocumento196 páginasSistemas de Gases MedicinalesJaime Montiel100% (5)
- Instalaciones Eléctricas en Baja Tensión: Unidad 4 ConductoresDocumento40 páginasInstalaciones Eléctricas en Baja Tensión: Unidad 4 ConductoresJaime MontielAún no hay calificaciones
- Tipos de Válvulas de Bola. Criterios de SelecciónDocumento20 páginasTipos de Válvulas de Bola. Criterios de Selecciónana valdezAún no hay calificaciones
- D033-PR-500!02!001 Guia Trabajos Espacios ConfinadosDocumento14 páginasD033-PR-500!02!001 Guia Trabajos Espacios ConfinadosDavid Enrique MendezAún no hay calificaciones
- Tabla de Area para SiliconDocumento1 páginaTabla de Area para SiliconJaime MontielAún no hay calificaciones
- Sikaflex 1aDocumento3 páginasSikaflex 1aJaime MontielAún no hay calificaciones
- Nom-012 1-Sedg-2003Documento24 páginasNom-012 1-Sedg-2003ing_marin69Aún no hay calificaciones
- Sellador-Elastico-Poliuretano-Sikaflex - 1a PDFDocumento3 páginasSellador-Elastico-Poliuretano-Sikaflex - 1a PDFJorge GutierrezAún no hay calificaciones
- Normativas, Seleccion y Procura de Valvulas IndustrialesDocumento2 páginasNormativas, Seleccion y Procura de Valvulas IndustrialesJaime MontielAún no hay calificaciones
- Soldadura Gasoductos API 1104 - AsmeDocumento80 páginasSoldadura Gasoductos API 1104 - Asmextevemo100% (2)
- Villacero ConduitDocumento6 páginasVillacero Conduitjamt85Aún no hay calificaciones
- Area de Recipientes (Convertidor) .Documento14 páginasArea de Recipientes (Convertidor) .traxhAún no hay calificaciones
- Instalaciones Eléctricas en Baja Tensión: Unidad 4 ConductoresDocumento40 páginasInstalaciones Eléctricas en Baja Tensión: Unidad 4 ConductoresJaime MontielAún no hay calificaciones
- Isométricos de tuberías: directrices generales para su diseño y lecturaDocumento11 páginasIsométricos de tuberías: directrices generales para su diseño y lecturajonpuebla100% (1)
- 03 Calculo Recipientes A PresionDocumento17 páginas03 Calculo Recipientes A PresionJaime MontielAún no hay calificaciones
- Instalaciones Eléctricas en Baja Tensión: Unidad 4 ConductoresDocumento40 páginasInstalaciones Eléctricas en Baja Tensión: Unidad 4 ConductoresJaime MontielAún no hay calificaciones
- Instalaciones Eléctricas en Baja Tensión: Unidad 4 ConductoresDocumento40 páginasInstalaciones Eléctricas en Baja Tensión: Unidad 4 ConductoresJaime MontielAún no hay calificaciones
- Area de Recipientes (Convertidor) .Documento14 páginasArea de Recipientes (Convertidor) .traxhAún no hay calificaciones
- Instalaciones Eléctricas en Baja Tensión: Unidad 4 ConductoresDocumento40 páginasInstalaciones Eléctricas en Baja Tensión: Unidad 4 ConductoresJaime MontielAún no hay calificaciones
- Planilla Control Adulto CaroDocumento18 páginasPlanilla Control Adulto CaroCami García Díaz AdopcionesAún no hay calificaciones
- Capitulo 5 - Pearson - Parte 1Documento25 páginasCapitulo 5 - Pearson - Parte 1ValeriaAún no hay calificaciones
- Tabla Aspectos Generales Del Adulto MayorDocumento4 páginasTabla Aspectos Generales Del Adulto MayorIle A100% (1)
- Que Fuerzas Son Las Que Determinan El Proceso de Filtración GlomerularDocumento4 páginasQue Fuerzas Son Las Que Determinan El Proceso de Filtración GlomerularPauli Sobarzo-VegaAún no hay calificaciones
- Ejercicios Calendario RomanoDocumento2 páginasEjercicios Calendario RomanoEmilio Pedro Bernal GómezAún no hay calificaciones
- AFIRMADODocumento28 páginasAFIRMADOwilsuelosAún no hay calificaciones
- Chepillo Cortes Alejandro Antonio ED-GEF-ME-IC - pdf-01 (REVA)Documento34 páginasChepillo Cortes Alejandro Antonio ED-GEF-ME-IC - pdf-01 (REVA)Francisco ValenzuelaAún no hay calificaciones
- PTS Control Pre-GateDocumento3 páginasPTS Control Pre-GateAndrés Venegas ZepedaAún no hay calificaciones
- Prueba Grado 11°Documento5 páginasPrueba Grado 11°SONIAAún no hay calificaciones
- NARCOLEPSIADocumento32 páginasNARCOLEPSIAJatziri OSAún no hay calificaciones
- Compatibilidad de Geminis y Capricornio - Buscar Con Google 2Documento1 páginaCompatibilidad de Geminis y Capricornio - Buscar Con Google 2mackloehoAún no hay calificaciones
- Actividad 1Documento3 páginasActividad 1Xhun Mat Pal LwinAún no hay calificaciones
- Joseph Kosuth - El Arte Después de La FilosofíaDocumento6 páginasJoseph Kosuth - El Arte Después de La FilosofíaDiana LópezAún no hay calificaciones
- Función beta: propiedades y relación con GammaDocumento2 páginasFunción beta: propiedades y relación con GammaalessandroAún no hay calificaciones
- Platicas Sobre El Sendero Del Ocultismo Tomo IIIDocumento337 páginasPlaticas Sobre El Sendero Del Ocultismo Tomo IIIJOSE ANTONIO CARVAJAL LOMBANAAún no hay calificaciones
- Quiz 2 - Semana 6 - CB - SEGUNDO BLOQUE-MATEMATICAS II - (GRUPO5) PDFDocumento7 páginasQuiz 2 - Semana 6 - CB - SEGUNDO BLOQUE-MATEMATICAS II - (GRUPO5) PDFLina Maria Cetina PinzonAún no hay calificaciones
- Hormonas SexualesDocumento2 páginasHormonas SexualesNeowancis Perez OgandoAún no hay calificaciones
- Actividad 6 Informe Sobre El Entorno de SIGRA S.A.Documento12 páginasActividad 6 Informe Sobre El Entorno de SIGRA S.A.Miguel OlayaAún no hay calificaciones
- Análisis InstrumentalDocumento52 páginasAnálisis InstrumentalDANIEL SOTO CHACON100% (1)
- 1 - Ley 26529. Derechos Del Pte.Documento6 páginas1 - Ley 26529. Derechos Del Pte.Alejandra ValdiviezoAún no hay calificaciones
- Memoria Descriptiva GeneralDocumento12 páginasMemoria Descriptiva GeneralJhymmy Calle AronesAún no hay calificaciones
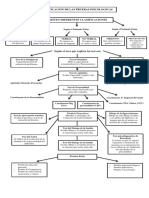
- Esquema - Clasificacion de Las Pruebas PsicologicasDocumento1 páginaEsquema - Clasificacion de Las Pruebas PsicologicasPoetaMelodyAún no hay calificaciones
- Operaciones de Perforación en Minería y Manipulación de ExplosivosDocumento194 páginasOperaciones de Perforación en Minería y Manipulación de ExplosivosGianina RamirezAún no hay calificaciones
- M. Praz MnemosyneDocumento25 páginasM. Praz MnemosyneIgnacio Pastén LópezAún no hay calificaciones
- Medidas de DispersiónDocumento7 páginasMedidas de DispersiónAle CasaAún no hay calificaciones
- Guia 4 Empresa y Su Constitución Legal PDFDocumento12 páginasGuia 4 Empresa y Su Constitución Legal PDFJeissonUyabanAún no hay calificaciones
- Anomalias Dentales de DesarrolloDocumento6 páginasAnomalias Dentales de DesarrolloJavier AguilarAún no hay calificaciones
- Teoría Familiar Monografía - psicologíaUCSMDocumento59 páginasTeoría Familiar Monografía - psicologíaUCSMSIsi LauraAún no hay calificaciones
- Sesión 6 EdanDocumento35 páginasSesión 6 EdanCesarAún no hay calificaciones
- Cálculo Y Dilución de Medicamentos Adultos Medicamento Phu Osmolaridad Estabilidad T 1/2 Antídoto VolúmenDocumento21 páginasCálculo Y Dilución de Medicamentos Adultos Medicamento Phu Osmolaridad Estabilidad T 1/2 Antídoto VolúmenYerania Fernandez OreaAún no hay calificaciones