También podría gustarte
- Montenegro, Carlos - Mejora de Procesos en Una Fábrica de Pastas ArtesanalesDocumento65 páginasMontenegro, Carlos - Mejora de Procesos en Una Fábrica de Pastas ArtesanalesLUIS MIGUEL GONZALEZAún no hay calificaciones
- Proyecto Punto de Venta MajaDocumento20 páginasProyecto Punto de Venta MajaMauricio CabreraAún no hay calificaciones
- TESIS FINAL - Vladimir CaceresDocumento144 páginasTESIS FINAL - Vladimir CaceresVladimir Caceres100% (1)
- Leccion 3 - Producto-Mínimo-viableDocumento5 páginasLeccion 3 - Producto-Mínimo-viableJuan Felipe LondoñoAún no hay calificaciones
- Bitacora I - Automatizacion - Grupo 9Documento6 páginasBitacora I - Automatizacion - Grupo 9Luis Miguel Paco ArceAún no hay calificaciones
- Practica #01 (Muestreo)Documento9 páginasPractica #01 (Muestreo)Claudia Coronel AllerAún no hay calificaciones
- Industria TextilDocumento20 páginasIndustria TextilViviana Mendo CruzadoAún no hay calificaciones
- Elaboracion de Mermelada de Mamey UssDocumento25 páginasElaboracion de Mermelada de Mamey UssErika ArmijosAún no hay calificaciones
- Mapa de Proceso Del Aprovisionamiento LogisticoDocumento8 páginasMapa de Proceso Del Aprovisionamiento LogisticoCarlosPradAún no hay calificaciones
- Gestion Marca KotlerDocumento38 páginasGestion Marca KotlerFaviAmus0% (1)
- PROBLEMAS TEMA 1 Dirección de La ProducciónDocumento3 páginasPROBLEMAS TEMA 1 Dirección de La ProducciónV.Aún no hay calificaciones
- KKJHHDocumento20 páginasKKJHHFrancelis RangelAún no hay calificaciones
- Trabajo FinalDocumento19 páginasTrabajo FinalMaria Fernanda Sanchez100% (1)
- Diagrama de Actividades MúltiplesDocumento13 páginasDiagrama de Actividades MúltiplesrodrigoAún no hay calificaciones
- Valcarce-Daniela Semana 3Documento10 páginasValcarce-Daniela Semana 3Daniela Eliana Valcarce PinoAún no hay calificaciones
- Cadena de Suministros Alpura Rodriguez JimenezDocumento8 páginasCadena de Suministros Alpura Rodriguez JimenezMigue De la CruzAún no hay calificaciones
- Modelo de Canvas MejoradoDocumento1 páginaModelo de Canvas MejoradoMarlon PizarroAún no hay calificaciones
- Estudio de Impacto Ambiental - Snack BarDocumento183 páginasEstudio de Impacto Ambiental - Snack Barronpauccar50% (2)
- Pastas AnitaDocumento23 páginasPastas AnitaNumero SieteAún no hay calificaciones
- Formulación Del Problema Como Modelo de Progrmación LinealDocumento10 páginasFormulación Del Problema Como Modelo de Progrmación LinealNatalia CaicedoAún no hay calificaciones
- Sistemas de ProduccionDocumento26 páginasSistemas de ProduccionanibalAún no hay calificaciones
- ICE Informe UvasDocumento26 páginasICE Informe UvasRene AlvarezAún no hay calificaciones
- Ejercicios Resueltos Regla de Rufini y Division de Polinomios de Matematicas 5to Año PDFDocumento6 páginasEjercicios Resueltos Regla de Rufini y Division de Polinomios de Matematicas 5to Año PDFJuan Jose Gamboa CovaAún no hay calificaciones
- Avance 3 FinalDocumento21 páginasAvance 3 FinalronaldAún no hay calificaciones
- Cuáles Han Sido Los Factores de Éxito de WallDocumento5 páginasCuáles Han Sido Los Factores de Éxito de WallAnonymous F54aFTAún no hay calificaciones
- Matriz Efe 2Documento7 páginasMatriz Efe 2edwin100% (1)
- ContenedorizaciónDocumento36 páginasContenedorizaciónIsaac Choez PinAún no hay calificaciones
- Nuggets de Carne de ConejoDocumento5 páginasNuggets de Carne de ConejoKaty Betzabe Aedo ArangoAún no hay calificaciones
- Jugo de Marañon 3Documento23 páginasJugo de Marañon 3Said Oma100% (1)
- Planta Procesadora de PanDocumento7 páginasPlanta Procesadora de PanCarlos Fernando Arguedas MoraAún no hay calificaciones
- Grupo 04 PlanAgregado PequeñaIndustria PDFDocumento7 páginasGrupo 04 PlanAgregado PequeñaIndustria PDFelizaAún no hay calificaciones
- Panaderia FinalDocumento38 páginasPanaderia FinalPerla Maciel ValdezAún no hay calificaciones
- Recapitulacion de Queso AndinoDocumento15 páginasRecapitulacion de Queso AndinoPither Jhoel Javier SucariAún no hay calificaciones
- MKTING1PROYECTOFINALDocumento43 páginasMKTING1PROYECTOFINALEmily HernandezAún no hay calificaciones
- Tesis Upc EntornosDocumento69 páginasTesis Upc EntornosMariangela ManriqueAún no hay calificaciones
- Focus GroupDocumento5 páginasFocus GroupAnita RamosAún no hay calificaciones
- Yapee o PlinDocumento37 páginasYapee o Plinjavier blas doloresAún no hay calificaciones
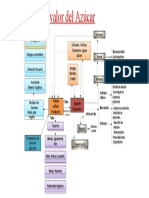
- Cadena de Valor Del AzúcarDocumento1 páginaCadena de Valor Del AzúcarPORTILLA PAGOLA RUBY DEL PILARAún no hay calificaciones
- CARRILLO QUIROZ, Aldo AlonzoDocumento158 páginasCARRILLO QUIROZ, Aldo AlonzoGuillermo GuillermoAún no hay calificaciones
- Diapositivas Del Trabajo Del Trigo LuisDocumento12 páginasDiapositivas Del Trabajo Del Trigo Luispaul dario100% (1)
- Sistema de Control de Almacenamiento de Materia PrimaDocumento115 páginasSistema de Control de Almacenamiento de Materia PrimaNatalia BonillaAún no hay calificaciones
- Proyecto Panadería YUP-PYDocumento30 páginasProyecto Panadería YUP-PYJulissa TorresAún no hay calificaciones
- Infografia de Conceptos Básicos de La AdminitracionDocumento4 páginasInfografia de Conceptos Básicos de La AdminitracionHumberto Jaimes ReséndizAún no hay calificaciones
- Aplicación Del Plan Agregado CamposolDocumento1 páginaAplicación Del Plan Agregado CamposolRosaAún no hay calificaciones
- Alamcenes Con El Metodo ABCDocumento135 páginasAlamcenes Con El Metodo ABCPercy Blanco FernandezAún no hay calificaciones
- Condicionamiento OperanteDocumento6 páginasCondicionamiento OperanteJosemy Gericó BelsaAún no hay calificaciones
- Tesis ChiflesDocumento180 páginasTesis ChiflesLuis ChuquiAún no hay calificaciones
- Accidente Araguaney Enero 2009Documento10 páginasAccidente Araguaney Enero 2009Manuel PQAún no hay calificaciones
- BPM - Proyecto de InvestigacionDocumento24 páginasBPM - Proyecto de InvestigacionDasha LunaAún no hay calificaciones
- Trabajo de PastasDocumento24 páginasTrabajo de Pastassandro2005Aún no hay calificaciones
- Caso de Exito Novedades ParaisoDocumento21 páginasCaso de Exito Novedades ParaisoLucero Alvarez RojasAún no hay calificaciones
- Sistemas de ProducciónDocumento21 páginasSistemas de ProducciónDayann Bernal100% (1)
- Empresa Coca ColaDocumento26 páginasEmpresa Coca ColaRayza TinocoAún no hay calificaciones
- Trabajo Final CostosDocumento19 páginasTrabajo Final CostosGabriel Eduardo Portocarrero CalderonAún no hay calificaciones
- Avena de YucaDocumento12 páginasAvena de YucaDaniela MendivelsoAún no hay calificaciones
- Informe LogisticoDocumento14 páginasInforme LogisticoDaniel Orjuela HopsaAún no hay calificaciones
- Diseño de Estrategia de Marketing para Mitigar El Uso de PlasticosDocumento35 páginasDiseño de Estrategia de Marketing para Mitigar El Uso de PlasticosJhoiner Rodrigez100% (1)
- Sistema para RestaurantesDocumento10 páginasSistema para RestaurantesTita Villa RamirezAún no hay calificaciones
- Bitacora 5 - Proyecto - Mermelada de Rocoto ArequipeñoDocumento88 páginasBitacora 5 - Proyecto - Mermelada de Rocoto ArequipeñoLuis Miguel Paco Arce100% (1)
- Bitacora 1 - Proyecto - Mermelada de Rocoto ArequipeñoDocumento17 páginasBitacora 1 - Proyecto - Mermelada de Rocoto ArequipeñoLuis Miguel Paco ArceAún no hay calificaciones
- Diapositivas Parcial Grupo 11 - ErgonomiaDocumento30 páginasDiapositivas Parcial Grupo 11 - ErgonomiaLuis Miguel Paco ArceAún no hay calificaciones
- Parcial Grupo 11 - ErgonomiaDocumento23 páginasParcial Grupo 11 - ErgonomiaLuis Miguel Paco ArceAún no hay calificaciones
- Comunicado Cierre TotalDocumento7 páginasComunicado Cierre TotalLuis Miguel Paco ArceAún no hay calificaciones
- Formatoss - V2Documento13 páginasFormatoss - V2Luis Miguel Paco ArceAún no hay calificaciones
- Formato Reporte de Actos y Condiciones SubestándaresDocumento2 páginasFormato Reporte de Actos y Condiciones SubestándaresLuis Miguel Paco ArceAún no hay calificaciones
- Plan de Gestión de La CalidadDocumento3 páginasPlan de Gestión de La CalidadLuis Miguel Paco Arce100% (1)
- Informe de Ergonomía PC1Documento13 páginasInforme de Ergonomía PC1Luis Miguel Paco ArceAún no hay calificaciones
- Checklist RotomartilloDocumento1 páginaChecklist RotomartilloLuis Miguel Paco ArceAún no hay calificaciones
- Informe de Ergonomía IncacelDocumento10 páginasInforme de Ergonomía IncacelLuis Miguel Paco ArceAún no hay calificaciones
- Comunicado de Cierre TotaLDocumento1 páginaComunicado de Cierre TotaLLuis Miguel Paco ArceAún no hay calificaciones
- Copia de 1era Práctica Calificada de Automatizacion 2021 - IDocumento2 páginasCopia de 1era Práctica Calificada de Automatizacion 2021 - ILuis Miguel Paco ArceAún no hay calificaciones
- Plan de RecursosDocumento5 páginasPlan de RecursosLuis Miguel Paco ArceAún no hay calificaciones
- Bitacora1 Proyecto Maquina Peladora y Empaquetadora de AjosDocumento21 páginasBitacora1 Proyecto Maquina Peladora y Empaquetadora de AjosLuis Miguel Paco ArceAún no hay calificaciones
- Seleccion de ControladoresDocumento8 páginasSeleccion de ControladoresAlexandra MavareAún no hay calificaciones
- Desarrollo de La Automatización Industrial en La Empresa Backus y JohnstonDocumento57 páginasDesarrollo de La Automatización Industrial en La Empresa Backus y JohnstonValderrama Daniel50% (2)
- Automatización Industrial - Variables (Tags) de PLCDocumento11 páginasAutomatización Industrial - Variables (Tags) de PLCSebastian CalvopiñaAún no hay calificaciones
- Unidad 6 Controles ElectricosDocumento14 páginasUnidad 6 Controles ElectricosBraYan Lagunas ToLedoAún no hay calificaciones
- Paulina Elizabeth Ayala Baño MGDocumento151 páginasPaulina Elizabeth Ayala Baño MGInesita AlmachiAún no hay calificaciones
- PLCDocumento52 páginasPLCRodrigoAún no hay calificaciones
- 7 PDFDocumento13 páginas7 PDFNicolas Arevalo RamirezAún no hay calificaciones
- Aplicación Con PLCDocumento5 páginasAplicación Con PLCpabloAún no hay calificaciones
- Tecnico Electricista2021Documento23 páginasTecnico Electricista2021Romeo Ronald Huisa TancailloAún no hay calificaciones
- Práctica 1 Laboratorio de AutomatizaciónDocumento19 páginasPráctica 1 Laboratorio de AutomatizaciónNallely GonzálezAún no hay calificaciones
- Act 1 Evidencia 2 Informe Desarrollar Diagramas de Contactos en Los PLCDocumento5 páginasAct 1 Evidencia 2 Informe Desarrollar Diagramas de Contactos en Los PLCSantiago Nieto Velandia67% (3)
- PAD Arquitectura Integrada PLC 850 ABDocumento14 páginasPAD Arquitectura Integrada PLC 850 ABDrojanle MezbraAún no hay calificaciones
- Automatizacion y Supervision de Un Ascensor PrototipoDocumento17 páginasAutomatizacion y Supervision de Un Ascensor PrototipoEduardo HenriquezAún no hay calificaciones
- Curso PLC OmronDocumento359 páginasCurso PLC Omronlalo502100% (2)
- Apuntes de PLC Unidad 1 y 2Documento43 páginasApuntes de PLC Unidad 1 y 2J Leks RoHndezAún no hay calificaciones
- Semana 03 Automatismo PDFDocumento36 páginasSemana 03 Automatismo PDFJoel Dennis DiegoAún no hay calificaciones
- Capítulo Iii: Diseño Y Construción Del Prototipo de Banda TransportadoraDocumento43 páginasCapítulo Iii: Diseño Y Construción Del Prototipo de Banda TransportadoraDirceBaltazarAún no hay calificaciones
- PFCDocumento180 páginasPFCWilmer E Cumbicus JiménezAún no hay calificaciones
- Carta GanttDocumento6 páginasCarta Ganttosvaldo_osorio_aAún no hay calificaciones
- Control PID - Allen Bradley SLC 500Documento21 páginasControl PID - Allen Bradley SLC 500Joshuan Garcia JaureguiAún no hay calificaciones
- Revista de Prototipos Tecnologicos V3 N10 6Documento6 páginasRevista de Prototipos Tecnologicos V3 N10 6Francisco Jose Donado NavasAún no hay calificaciones
- PLC Escalera 20 JulioDocumento6 páginasPLC Escalera 20 JulioFercho SaáAún no hay calificaciones
- Códigos para InstrumentosDocumento33 páginasCódigos para InstrumentosHéctor MaldonadoAún no hay calificaciones
- PACs para Control IndustrialDocumento8 páginasPACs para Control IndustrialSaya CoaquiAún no hay calificaciones
- Horner Automatic GroupDocumento12 páginasHorner Automatic Groupjose davidAún no hay calificaciones
- Proceso de Produccion de La Gaseosa Big ColaDocumento370 páginasProceso de Produccion de La Gaseosa Big ColaSylvster Shego Perez80% (5)
- S1a48998 12Documento442 páginasS1a48998 12Ignacio DelgadoAún no hay calificaciones
- Evidencia - 3 - Informe - Aplicar - Lenguajes - de - Programacion - y - Planos - de - Contactos Oscar AriasDocumento7 páginasEvidencia - 3 - Informe - Aplicar - Lenguajes - de - Programacion - y - Planos - de - Contactos Oscar AriasOscar AriasAún no hay calificaciones
- Tesis Marmita BuenaDocumento109 páginasTesis Marmita BuenaJohn Phaulo Muñoz Rincon100% (1)