También podría gustarte
- Fundamentos de ElectronicaDocumento74 páginasFundamentos de ElectronicaSandRo Chavez100% (2)
- Diseño de Redes Telemáticas (MF0228_3)De EverandDiseño de Redes Telemáticas (MF0228_3)Calificación: 5 de 5 estrellas5/5 (1)
- Programación de microcontroladores paso a paso: Ejemplos prácticos desarrollados en la nubeDe EverandProgramación de microcontroladores paso a paso: Ejemplos prácticos desarrollados en la nubeAún no hay calificaciones
- Proyecto Mototaxis 1Documento35 páginasProyecto Mototaxis 1Daniel ParedesAún no hay calificaciones
- Cap8 DiagramasDocumento35 páginasCap8 DiagramasDaniel ParedesAún no hay calificaciones
- Sistema de información para la operación remota de plantas de generación de energía hidroeléctricaDe EverandSistema de información para la operación remota de plantas de generación de energía hidroeléctricaAún no hay calificaciones
- MICROCONTROLADORESDocumento35 páginasMICROCONTROLADORESjosipAún no hay calificaciones
- Introducción A MicrocontroladoresDocumento22 páginasIntroducción A MicrocontroladoresAdrian Felipe Marca Callisaya100% (1)
- Maniobra Otis MCS310 Informacion General 1 PDFDocumento27 páginasManiobra Otis MCS310 Informacion General 1 PDFbaaak0% (1)
- Operacion Del MontacargasDocumento76 páginasOperacion Del MontacargasMarco Antonio Constantino Moreno100% (1)
- 286-Nuevos Sistemas de CAN-Bus - LIN, MOST, TMDocumento56 páginas286-Nuevos Sistemas de CAN-Bus - LIN, MOST, TMGildardo Casarrubias Segura100% (7)
- Curso Autómatas Programables s7200Documento105 páginasCurso Autómatas Programables s7200gemomarAún no hay calificaciones
- Electronica y MicrocontroladoresDocumento20 páginasElectronica y Microcontroladorescastillo25086% (7)
- Televisión digital y telecomunicaciones en comunidades de propietariosDe EverandTelevisión digital y telecomunicaciones en comunidades de propietariosAún no hay calificaciones
- Clase 1 SistemasEmbebidosDocumento43 páginasClase 1 SistemasEmbebidosAnonymous TFLtpxuWZAún no hay calificaciones
- Sistemas Embebidos Clase 1Documento42 páginasSistemas Embebidos Clase 1Tesla McLovinAún no hay calificaciones
- Microprocesadores y Computadoras-Arq de HardwareDocumento17 páginasMicroprocesadores y Computadoras-Arq de HardwareRodolfo UribeAún no hay calificaciones
- PLC TeoriaDocumento23 páginasPLC TeoriaDavidAún no hay calificaciones
- Motores Sew - PDF 1Documento24 páginasMotores Sew - PDF 1joseAún no hay calificaciones
- Manual Del Programa Agrónic PC Versión 3Documento64 páginasManual Del Programa Agrónic PC Versión 3BladimirAún no hay calificaciones
- Tema 1Documento26 páginasTema 1AntonioAún no hay calificaciones
- 3452Documento34 páginas3452scribdabrAún no hay calificaciones
- Evaluacion PLCDocumento22 páginasEvaluacion PLCDavidAún no hay calificaciones
- Arquitectura de Un MicrocontroladorDocumento17 páginasArquitectura de Un MicrocontroladorsamaraAún no hay calificaciones
- T1C1 Arquitectura 201127Documento18 páginasT1C1 Arquitectura 201127mooonAún no hay calificaciones
- 1.1 MicrocontroladoresDocumento8 páginas1.1 MicrocontroladoresLuis Enrique Mosqueda RamirezAún no hay calificaciones
- Industrial UT3 Apuntes Autómatas ProgramablesDocumento69 páginasIndustrial UT3 Apuntes Autómatas ProgramablesDave MinionAún no hay calificaciones
- Procesador Motorola 68000Documento13 páginasProcesador Motorola 68000Henner Rivas Be̶r̶r̶i̶o̶Aún no hay calificaciones
- Microcontroladores IntroduccionDocumento29 páginasMicrocontroladores IntroduccionDeysi Leonela100% (1)
- 1 Introducción A Los Up y UcDocumento43 páginas1 Introducción A Los Up y UcAriel AlarconAún no hay calificaciones
- PicDocumento127 páginasPicManuel Alberto Jaramillo LugoAún no hay calificaciones
- Introducción A Los Microprocesadores y MicrocontroladoresDocumento20 páginasIntroducción A Los Microprocesadores y MicrocontroladoresMartin HGAún no hay calificaciones
- Comunicaciones Industriales: Ingeniería Electrónica Y AutomáticaDocumento33 páginasComunicaciones Industriales: Ingeniería Electrónica Y AutomáticaJorge Antonio Canché HáuAún no hay calificaciones
- Introducción A Los MicrocontroladoresDocumento12 páginasIntroducción A Los MicrocontroladoresJunior FigueroaAún no hay calificaciones
- Eribert de Oliveira Trabajo 1 DCSDocumento6 páginasEribert de Oliveira Trabajo 1 DCSE. De OliveiraAún no hay calificaciones
- Can Bus 1 PDFDocumento26 páginasCan Bus 1 PDFDaniel Calderon100% (1)
- Tarea1 MicrocontroladoresDocumento24 páginasTarea1 MicrocontroladoresRaul TamezAún no hay calificaciones
- MicrocontroladoresDocumento12 páginasMicrocontroladoresEdwin VelasteguiAún no hay calificaciones
- Tarea 07-Bao Villarreal, Frankarlos.Documento9 páginasTarea 07-Bao Villarreal, Frankarlos.Francarlos Bao VillarrealAún no hay calificaciones
- Estacion ConveyorDocumento32 páginasEstacion ConveyorDiego JavierAún no hay calificaciones
- Introducción A Los MicrocontroladoresDocumento21 páginasIntroducción A Los MicrocontroladoresCristian PachecoAún no hay calificaciones
- Presentacion PLCDocumento9 páginasPresentacion PLCFrancisco De La CruzAún no hay calificaciones
- Mapas ConceptualesDocumento13 páginasMapas ConceptualesGuillermo RomeroAún no hay calificaciones
- Libro - Vilca Separata Microcontroladores PicDocumento45 páginasLibro - Vilca Separata Microcontroladores PicAlexander Sanchez MoralesAún no hay calificaciones
- 7-2 MicrocontroladoresDocumento120 páginas7-2 MicrocontroladoresRicky CoxAún no hay calificaciones
- Microprocesadores PDFDocumento131 páginasMicroprocesadores PDFJuan Gusman Gutierrez100% (1)
- 01 IntroducciónDocumento13 páginas01 IntroducciónWilson BoladosAún no hay calificaciones
- Informe Semaforo1Documento11 páginasInforme Semaforo1CHRISTIAN GUAYPATINAún no hay calificaciones
- Guía PICDocumento86 páginasGuía PICMako AntonioAún no hay calificaciones
- Practica 6Documento21 páginasPractica 6Cosicruz51Aún no hay calificaciones
- UC en TelecomunicacionesDocumento16 páginasUC en TelecomunicacionesZet LaimeAún no hay calificaciones
- MICROCONTROLADORESDocumento33 páginasMICROCONTROLADORESEdwin Eder León Díaz50% (2)
- Es 16 000493 Ing Sec MD 001 00Documento16 páginasEs 16 000493 Ing Sec MD 001 00Edgardo Peña CamargoAún no hay calificaciones
- NTC 5797Documento21 páginasNTC 5797Nestor HernandezAún no hay calificaciones
- Cha Cha 18Documento8 páginasCha Cha 18Uriel JimenezAún no hay calificaciones
- PIC16 F84 V 2Documento105 páginasPIC16 F84 V 2Paul PerezAún no hay calificaciones
- Tarea Rele ProgramableDocumento20 páginasTarea Rele ProgramableIvan HernandezAún no hay calificaciones
- Micro Control AdoresDocumento22 páginasMicro Control Adoresnel zambranoAún no hay calificaciones
- PR 869 Com MD 001 00Documento18 páginasPR 869 Com MD 001 00Morales EduardoAún no hay calificaciones
- Presentación de MicrocontroladoresDocumento6 páginasPresentación de MicrocontroladoresPedro Franklin MeranAún no hay calificaciones
- Trabajo de Control e Instrumentación de Procesos N°07Documento9 páginasTrabajo de Control e Instrumentación de Procesos N°07MORALES ORTEGA RONALD HENRYAún no hay calificaciones
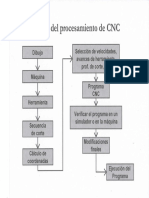
- 3.1 - Flujo de Proceso CNCDocumento1 página3.1 - Flujo de Proceso CNCDaniel ParedesAún no hay calificaciones
- Unidad 1 Sistemas de ManufacturaDocumento55 páginasUnidad 1 Sistemas de ManufacturaDaniel ParedesAún no hay calificaciones
- Programa de La MateriaDocumento2 páginasPrograma de La MateriaDaniel ParedesAún no hay calificaciones
- PROCESOS DE MANUFACTURA ExposiciónDocumento2 páginasPROCESOS DE MANUFACTURA ExposiciónJuan JaimesAún no hay calificaciones
- Tipos de Máquinas y Centros de MecanizadoDocumento4 páginasTipos de Máquinas y Centros de MecanizadoDaniel ParedesAún no hay calificaciones
- 6 - Archivo 2Documento10 páginas6 - Archivo 2Daniel ParedesAún no hay calificaciones
- Torno Hass Abc PDFDocumento464 páginasTorno Hass Abc PDFalexander gonzalez100% (1)
- RefrigerantesDocumento28 páginasRefrigerantesyamir67Aún no hay calificaciones
- ReferenciaDocumento1 páginaReferenciaDaniel ParedesAún no hay calificaciones
- Archivo 1Documento9 páginasArchivo 1Daniel ParedesAún no hay calificaciones
- 9 EsteDocumento3 páginas9 EsteDaniel ParedesAún no hay calificaciones
- Tablas A3 y A4Documento2 páginasTablas A3 y A4Daniel ParedesAún no hay calificaciones
- 9 EsteDocumento3 páginas9 EsteDaniel ParedesAún no hay calificaciones
- Costos y PresupuestosDocumento209 páginasCostos y PresupuestosDaniel Cab SalazarAún no hay calificaciones
- Paredes Hernandez Daniel Gerardo 187O03055Documento13 páginasParedes Hernandez Daniel Gerardo 187O03055Daniel ParedesAún no hay calificaciones
- Cuestionario 4, 4.1 y 4.2Documento2 páginasCuestionario 4, 4.1 y 4.2Daniel ParedesAún no hay calificaciones
- Paredes Hernandez Daniel Gerardo 187O03055Documento13 páginasParedes Hernandez Daniel Gerardo 187O03055Daniel ParedesAún no hay calificaciones
- Actividad 9 de NovDocumento1 páginaActividad 9 de NovDaniel ParedesAún no hay calificaciones
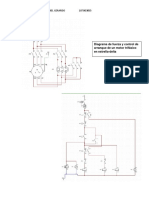
- Arranque de Un Motor 3 Con AutotransformadorDocumento4 páginasArranque de Un Motor 3 Con AutotransformadorDaniel ParedesAún no hay calificaciones
- Arranque de Un Motor 3 en Y-DeltaDocumento3 páginasArranque de Un Motor 3 en Y-DeltaDaniel ParedesAún no hay calificaciones
- Paredes Hernandez Daniel Gerardo 187O03055Documento13 páginasParedes Hernandez Daniel Gerardo 187O03055Daniel ParedesAún no hay calificaciones
- Cuestionario 1.1Documento3 páginasCuestionario 1.1Daniel ParedesAún no hay calificaciones
- Principios de Refrigeracion Unidad 1Documento27 páginasPrincipios de Refrigeracion Unidad 1R Iván TG100% (1)
- PresentaciónDocumento11 páginasPresentaciónDaniel ParedesAún no hay calificaciones
- Resumen 2, 2.1 y 2.2Documento1 páginaResumen 2, 2.1 y 2.2Daniel ParedesAún no hay calificaciones
- Resumen 2.3, 2.4 y 2.5Documento2 páginasResumen 2.3, 2.4 y 2.5Daniel ParedesAún no hay calificaciones
- Cuestionario 1.2 y 1.3Documento2 páginasCuestionario 1.2 y 1.3Daniel ParedesAún no hay calificaciones
- Cuestionario 2.3, 2.4 y 2.5Documento4 páginasCuestionario 2.3, 2.4 y 2.5Daniel ParedesAún no hay calificaciones
- Diseño de CargosDocumento17 páginasDiseño de CargosErick Hades100% (1)
- Estructura Seguimiento Integrada UP 2020Documento119 páginasEstructura Seguimiento Integrada UP 2020Alex Duque Ortega OrtizAún no hay calificaciones
- Tecnica Aleta de MordidaDocumento5 páginasTecnica Aleta de MordidaCésar Rodriguez EspinozaAún no hay calificaciones
- RABITODocumento2 páginasRABITOfredmusividaAún no hay calificaciones
- 2.2 Tipos de SoldaduraDocumento11 páginas2.2 Tipos de SoldaduraHebander EsauAún no hay calificaciones
- Pedido SragisselayvariosDocumento6 páginasPedido SragisselayvariosDixy HerreraAún no hay calificaciones
- Cartilla Ley21057 3Documento32 páginasCartilla Ley21057 3yolanda aparicio acevedoAún no hay calificaciones
- 10 Métodos de BiorremediaciónDocumento6 páginas10 Métodos de BiorremediaciónOMECOATZIN120% (1)
- Microsoft WordDocumento3 páginasMicrosoft WordShirley QuiñónezAún no hay calificaciones
- Actividad 4Documento4 páginasActividad 4Angie Valentina TRUJILLO CABALLEROAún no hay calificaciones
- CasoDocumento1 páginaCasoHudson Jr Veliz RodriguezAún no hay calificaciones
- Taller Pelicula The FounderDocumento2 páginasTaller Pelicula The FounderPaula Andrea LopezAún no hay calificaciones
- Capitulo 5 DumraufDocumento5 páginasCapitulo 5 DumraufBrian SilgueroAún no hay calificaciones
- Prueba Escrita de Investigacion AcciónDocumento3 páginasPrueba Escrita de Investigacion AcciónLuis Huaillapuma100% (1)
- Ciencia e InvestigacionDocumento92 páginasCiencia e InvestigacionDavid TerranovaAún no hay calificaciones
- Guia 2. Nutricion en Hongos y Vegetales PDFDocumento3 páginasGuia 2. Nutricion en Hongos y Vegetales PDFtoxico ytAún no hay calificaciones
- Evaluación SensorialDocumento7 páginasEvaluación SensorialLara ObedAún no hay calificaciones
- Copia de Tu Gran IdeaDocumento15 páginasCopia de Tu Gran IdeaTOP - s1mpleAún no hay calificaciones
- Mousse de Sangrecita TripticoDocumento2 páginasMousse de Sangrecita TripticoEdward RosadoAún no hay calificaciones
- Toma de Decisiones.Documento8 páginasToma de Decisiones.jimmy alexander betancourtAún no hay calificaciones
- Proyecto en Limpio de Tecnico MedioDocumento81 páginasProyecto en Limpio de Tecnico MedioblancaAún no hay calificaciones
- NanyangDocumento50 páginasNanyangMeyli ServànAún no hay calificaciones
- Bloque I - Fase PreparatoriaDocumento60 páginasBloque I - Fase PreparatoriaMishell TatianaAún no hay calificaciones
- La Misión de La UniversidadDocumento2 páginasLa Misión de La UniversidadWilmer Enrique Mejia MendezAún no hay calificaciones
- Informe Practica Banco de Condensadores DidacticoDocumento3 páginasInforme Practica Banco de Condensadores DidacticoRICARDO ABRIL ROJASAún no hay calificaciones
- Conocimiento Didáctico Del ContenidoDocumento8 páginasConocimiento Didáctico Del ContenidoDiana Guadalupe Lopez OlveraAún no hay calificaciones
- Instructivo Cartografico IvDocumento26 páginasInstructivo Cartografico IvDiegoNarroRivaAgueroAún no hay calificaciones
- Desarrollo de Una Aplicación Móvil Multiplataforma de Mensajería Instantanea para Agentes EmpresarialesDocumento103 páginasDesarrollo de Una Aplicación Móvil Multiplataforma de Mensajería Instantanea para Agentes EmpresarialesJose FranciscoAún no hay calificaciones
- Matriz Funcional de MossDocumento12 páginasMatriz Funcional de MossMaria Claudia Florez TanusAún no hay calificaciones