También podría gustarte
- Funciòn de TransferenciaDocumento33 páginasFunciòn de TransferenciaJairo Velásquez BustosAún no hay calificaciones
- Tarea 3 de Ecuaciones DiferencialesDocumento24 páginasTarea 3 de Ecuaciones DiferencialesHIRAMAún no hay calificaciones
- 2do OrdenDocumento2 páginas2do OrdenMichael YacksonAún no hay calificaciones
- Solucion Prueba5Documento2 páginasSolucion Prueba5registradoresAún no hay calificaciones
- Trabajo Grupal A. Matematico IVDocumento10 páginasTrabajo Grupal A. Matematico IVRoyer Valdivia BarretoAún no hay calificaciones
- HalleDocumento7 páginasHalleerwin de jesus alvarez diazAún no hay calificaciones
- Transformadas de DerivadasDocumento4 páginasTransformadas de Derivadaskarla somerhalder100% (1)
- Semana 14 Ecuaciones Diferenciales 14 - 2021Documento78 páginasSemana 14 Ecuaciones Diferenciales 14 - 2021Joaquin OtreraAún no hay calificaciones
- Entregable de Transformadas de LaplaceDocumento16 páginasEntregable de Transformadas de LaplaceLuis Adad Mora SolísAún no hay calificaciones
- Eje 4 Ecuaciones DiferencialesDocumento6 páginasEje 4 Ecuaciones DiferencialesLuisa Fernandez FlorezAún no hay calificaciones
- Espacio - Vectorial TEORIADocumento17 páginasEspacio - Vectorial TEORIAfranco bejaranoAún no hay calificaciones
- Ejecicios 7.3Documento6 páginasEjecicios 7.3Clara FlorianoAún no hay calificaciones
- OsirisDocumento3 páginasOsirisJAVIER ANDRES LUNAAún no hay calificaciones
- Unad 97216 Ecuaciones Diferenciales Tarea 3Documento12 páginasUnad 97216 Ecuaciones Diferenciales Tarea 3Alfredo BlascoAún no hay calificaciones
- BONO MATE IV Leonardo Jose Tamayo RosasDocumento4 páginasBONO MATE IV Leonardo Jose Tamayo RosasAdolfo TamayoAún no hay calificaciones
- Calculo DiferencialDocumento4 páginasCalculo DiferencialDavid Camilo Castañeda PardoAún no hay calificaciones
- Circuitos y Redes ControlDocumento7 páginasCircuitos y Redes ControlEric ArevaloAún no hay calificaciones
- Analisis de Un Sistema DinamicoDocumento5 páginasAnalisis de Un Sistema DinamicoEder Jaziel Villa ParraAún no hay calificaciones
- TlaplaceDocumento100 páginasTlaplaceEdselso EdsAún no hay calificaciones
- Repaso LaplaceDocumento44 páginasRepaso LaplaceLuis Quispe DiazAún no hay calificaciones
- Ejercicios 3Documento4 páginasEjercicios 3PÉREZ CASTELLANOS WILLIAMAún no hay calificaciones
- Ejercicio Nro 3Documento4 páginasEjercicio Nro 3Manuel AngelAún no hay calificaciones
- 2 CAPITULO I T LAPLACE Sem 8 9Documento5 páginas2 CAPITULO I T LAPLACE Sem 8 9Patrick Richard Campos ZamataAún no hay calificaciones
- Ejercicios Resueltos LaplaceDocumento9 páginasEjercicios Resueltos LaplaceTomasDArrietaLopezAún no hay calificaciones
- Laplace PDFDocumento65 páginasLaplace PDFJaime Garcia SomohanoAún no hay calificaciones
- Informe Final Matematica 3Documento24 páginasInforme Final Matematica 3ALDER GUSMANAún no hay calificaciones
- Modelo de Movimiento Forzado Con AmortiguaciónDocumento12 páginasModelo de Movimiento Forzado Con Amortiguacióndammaqui100% (1)
- Preliminares Matemáticos MatricesDocumento37 páginasPreliminares Matemáticos MatricesLima Garcia JuanAún no hay calificaciones
- Sesion 7 Transformada de Laplace InversaDocumento16 páginasSesion 7 Transformada de Laplace InversaAGLAE GUTIERREZ VELARDEAún no hay calificaciones
- Mali1 U3 A2 V1 GemcDocumento9 páginasMali1 U3 A2 V1 GemcViollet Cruz100% (1)
- Ejercicio2 Karen MoralesDocumento6 páginasEjercicio2 Karen MoralesEdoardo PalumboAún no hay calificaciones
- Unidad 3 Transformada de Laplace para Ecuaciones de Orden SuperiorDocumento7 páginasUnidad 3 Transformada de Laplace para Ecuaciones de Orden SuperiorPablo Daniel Martinez ZavalaAún no hay calificaciones
- Actividad de Aprendizaje 1. Sistemas de CoordenadasDocumento5 páginasActividad de Aprendizaje 1. Sistemas de CoordenadasDark Angel26Aún no hay calificaciones
- CE2 EXA02 SolucionDocumento5 páginasCE2 EXA02 Solucion2173036016Aún no hay calificaciones
- Paso 7 - Prueba de Conocimientos Unidad 3Documento5 páginasPaso 7 - Prueba de Conocimientos Unidad 3Juan Pablo Rodriguez Usme0% (1)
- Anexo 5 - Plantilla Entrega Tarea 3 - Yeison MesaDocumento17 páginasAnexo 5 - Plantilla Entrega Tarea 3 - Yeison MesaGENNY URIBEAún no hay calificaciones
- Tarea Trasformadas de Laplace Usando FormulasDocumento11 páginasTarea Trasformadas de Laplace Usando FormulasCarlos Jose Rodriguez MartinezAún no hay calificaciones
- 2da Practica Laplace1Documento20 páginas2da Practica Laplace1Nico PerezAún no hay calificaciones
- Tarea4 208046 534 Andres GutierrezDocumento10 páginasTarea4 208046 534 Andres GutierrezANDRES FELIPE GUTIERREZ HUERTASAún no hay calificaciones
- 3 Era PracticaDocumento15 páginas3 Era PracticaGrecia Melissa Dionicio AntunezAún no hay calificaciones
- Ecuaciones DiferencialesDocumento3 páginasEcuaciones DiferencialesJanelle BazánAún no hay calificaciones
- Ejemplos Laplace Transformada Z ConvolucDocumento23 páginasEjemplos Laplace Transformada Z ConvolucLuis NinaAún no hay calificaciones
- Tarea4 Cristian Ruiz SDocumento15 páginasTarea4 Cristian Ruiz SCristian RuizAún no hay calificaciones
- Teorema de Convolución y Circuitos Eléctricos URLDocumento6 páginasTeorema de Convolución y Circuitos Eléctricos URLCARLOS EDUARDO ARROYOAún no hay calificaciones
- Control7 Circuitos y RedesDocumento6 páginasControl7 Circuitos y RedesChristian OrellanaAún no hay calificaciones
- Aplicaciones de Laplace PDFDocumento60 páginasAplicaciones de Laplace PDFRoberto PerezAún no hay calificaciones
- Sistema de CordenadasDocumento5 páginasSistema de CordenadasEduardo Alexis GuzmanAún no hay calificaciones
- Punto 1 Trabajo 3 EDODocumento8 páginasPunto 1 Trabajo 3 EDOAna Gabriela RicardoAún no hay calificaciones
- Informe Investigativo 2Documento8 páginasInforme Investigativo 2Gilberto AguiarAún no hay calificaciones
- Circuitos y Redes - Mayker - Céspedes - Control7Documento6 páginasCircuitos y Redes - Mayker - Céspedes - Control7Mayker Angelo Céspedes UrriolaAún no hay calificaciones
- Ecuaciones DiferencialesDocumento19 páginasEcuaciones DiferencialesAldo GarciaAún no hay calificaciones
- 218Documento9 páginas218Lina Fernanda Rojas GarciaAún no hay calificaciones
- ED - Ejercicio 3 - Sergio ContrerasDocumento4 páginasED - Ejercicio 3 - Sergio Contrerasfelipe salamancaAún no hay calificaciones
- Ecuacio - JefhiDocumento7 páginasEcuacio - JefhiJesica PeñuelaAún no hay calificaciones
- Pretarea - Actividad de Presaberes Control AnalogoDocumento8 páginasPretarea - Actividad de Presaberes Control AnalogoMelanny MenesesAún no hay calificaciones
- Adrián - Salinas - Control 7Documento5 páginasAdrián - Salinas - Control 7adrian100% (1)
- Aplicaciones de La Transformada de LaplaceDocumento11 páginasAplicaciones de La Transformada de LaplaceauthorAún no hay calificaciones
- Solución Actividad Evaluativa Eje 4 - Ecuaciones DiferencialesDocumento8 páginasSolución Actividad Evaluativa Eje 4 - Ecuaciones Diferencialesfredy diazAún no hay calificaciones
- Taller EJE 4 ECUACIONES DIFERENCIALESDocumento12 páginasTaller EJE 4 ECUACIONES DIFERENCIALESLuisa Fernandez Florez100% (2)
- La ecuación general de segundo grado en dos y tres variablesDe EverandLa ecuación general de segundo grado en dos y tres variablesAún no hay calificaciones
- Fase2 Luis GarzonDocumento11 páginasFase2 Luis Garzonivan alejandro lopez moralesAún no hay calificaciones
- Fase3 Luis GarzonDocumento12 páginasFase3 Luis Garzonivan alejandro lopez moralesAún no hay calificaciones
- Fase5 Ivanlopez Grupo11Documento3 páginasFase5 Ivanlopez Grupo11ivan alejandro lopez moralesAún no hay calificaciones
- Fase3 Ivanlopez Grupo11Documento8 páginasFase3 Ivanlopez Grupo11ivan alejandro lopez moralesAún no hay calificaciones
- Fase4 Ivanlopez Grupo11Documento11 páginasFase4 Ivanlopez Grupo11ivan alejandro lopez moralesAún no hay calificaciones
- Fase 3-Daniel CardonaDocumento11 páginasFase 3-Daniel Cardonaivan alejandro lopez moralesAún no hay calificaciones
- Paso1 Grupo54 Ivan LopezDocumento7 páginasPaso1 Grupo54 Ivan Lopezivan alejandro lopez moralesAún no hay calificaciones
- BederZuleta - Fase3 - Grupo 11Documento9 páginasBederZuleta - Fase3 - Grupo 11ivan alejandro lopez moralesAún no hay calificaciones
- Fase4 Ivanlopez Grupo11Documento11 páginasFase4 Ivanlopez Grupo11ivan alejandro lopez moralesAún no hay calificaciones
- Aporte Individual-Etapa3 - Felipe RojasDocumento16 páginasAporte Individual-Etapa3 - Felipe Rojasivan alejandro lopez moralesAún no hay calificaciones
- Fase5 Ivanlopez Grupo11Documento3 páginasFase5 Ivanlopez Grupo11ivan alejandro lopez moralesAún no hay calificaciones
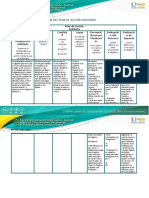
- Ficha Del Plan de Acción Solidaria.Documento2 páginasFicha Del Plan de Acción Solidaria.ivan alejandro lopez moralesAún no hay calificaciones
- Responder EncuestaDocumento6 páginasResponder Encuestaivan alejandro lopez moralesAún no hay calificaciones
- Etapa4 Gerardo Rojas Carvajal Grupo951 AporteDocumento16 páginasEtapa4 Gerardo Rojas Carvajal Grupo951 Aporteivan alejandro lopez morales0% (1)
- Etapa 4 - IndividualDocumento4 páginasEtapa 4 - Individualivan alejandro lopez moralesAún no hay calificaciones
- Etapa4 Gerardo Rojas Carvajal Grupo951Documento12 páginasEtapa4 Gerardo Rojas Carvajal Grupo951ivan alejandro lopez moralesAún no hay calificaciones
- Instrumento en WordDocumento2 páginasInstrumento en WordDANIELA VALENTINA SILVA LARAAún no hay calificaciones
- Fase1 IvanlopezDocumento8 páginasFase1 Ivanlopezivan alejandro lopez moralesAún no hay calificaciones
- Aporte Individual-Etapa3 - Ivan LopezDocumento16 páginasAporte Individual-Etapa3 - Ivan Lopezivan alejandro lopez morales100% (1)
- Ficha Del Plan de Acción Solidaria-Ivan LopezDocumento3 páginasFicha Del Plan de Acción Solidaria-Ivan Lopezivan alejandro lopez moralesAún no hay calificaciones
- Fase 0 Berley BenitezDocumento9 páginasFase 0 Berley Benitezivan alejandro lopez moralesAún no hay calificaciones
- Fase2 IvanlopezDocumento18 páginasFase2 Ivanlopezivan alejandro lopez moralesAún no hay calificaciones
- E1 Ivan Lopez Grupo 52Documento6 páginasE1 Ivan Lopez Grupo 52ivan alejandro lopez moralesAún no hay calificaciones
- Aporte Individual-Etapa3 - Felipe RojasDocumento16 páginasAporte Individual-Etapa3 - Felipe Rojasivan alejandro lopez moralesAún no hay calificaciones
- 9.2.9 Packet Tracer - Examine The ARP Table - Sebastian TorresDocumento7 páginas9.2.9 Packet Tracer - Examine The ARP Table - Sebastian Torresivan alejandro lopez moralesAún no hay calificaciones
- 10.3.4 Packet Tracer - Connect A Router To A LAN - Jhon RamirezDocumento18 páginas10.3.4 Packet Tracer - Connect A Router To A LAN - Jhon Ramirezivan alejandro lopez moralesAún no hay calificaciones
- Etapa 3 - IndividualDocumento5 páginasEtapa 3 - Individualivan alejandro lopez moralesAún no hay calificaciones
- Etapa3 Gerardo Rojas Carvajal Grupo951Documento12 páginasEtapa3 Gerardo Rojas Carvajal Grupo951ivan alejandro lopez moralesAún no hay calificaciones
- 9.3.4 Packet Tracer - IPv6 Neighbor Discovery - Alvaro CardenasDocumento19 páginas9.3.4 Packet Tracer - IPv6 Neighbor Discovery - Alvaro Cardenasivan alejandro lopez moralesAún no hay calificaciones
- Catalog ASEIN 2006 Perii CarbonDocumento146 páginasCatalog ASEIN 2006 Perii CarbonJuanPedroGarciaZaguirre100% (1)
- Cuaderno de Informes - IFP Semana 3Documento18 páginasCuaderno de Informes - IFP Semana 3Deker QuispeAún no hay calificaciones
- Ejerc Resistencia Electrica USSDocumento3 páginasEjerc Resistencia Electrica USSJHANSSETH SMITH ZAPATA SOTOAún no hay calificaciones
- Zabala Berrios Carlos Inf7 Vaciocorto-1Documento21 páginasZabala Berrios Carlos Inf7 Vaciocorto-1Erbin C EspinozaAún no hay calificaciones
- Convertidor - DacDocumento16 páginasConvertidor - DaccarlosAún no hay calificaciones
- SevDocumento38 páginasSevRobert Sullcahuaman DelgadoAún no hay calificaciones
- Cómo Produce La Anguila Eléctrica ElectricidadDocumento2 páginasCómo Produce La Anguila Eléctrica Electricidadyngridchacon100% (2)
- Análisis de Cargas y Costos de Una Instalación EléctricaDocumento2 páginasAnálisis de Cargas y Costos de Una Instalación EléctricaJosé Eduardo Flores CruzAún no hay calificaciones
- F0101R01 LVP LVP-IV Seccionador Bajo Carga InteriorDocumento4 páginasF0101R01 LVP LVP-IV Seccionador Bajo Carga InteriorJorge LeanizAún no hay calificaciones
- Soldadora Por Puntos de BateríaDocumento8 páginasSoldadora Por Puntos de Bateríajoel canelaAún no hay calificaciones
- Investigación 2 ParcialDocumento2 páginasInvestigación 2 ParcialAlberto MaldonadoAún no hay calificaciones
- Control de Regulacion de Velocidad de Un MotorDocumento15 páginasControl de Regulacion de Velocidad de Un MotorAaron Lapa MoscosoAún no hay calificaciones
- Lista de PreciosDocumento2 páginasLista de PreciosSergio GarciaAún no hay calificaciones
- Imanes Terapéuticos PDFDocumento79 páginasImanes Terapéuticos PDF0vicman100% (4)
- Configuracion Basica Rectificador Vertiv Netsure Serie 701 18 KWDocumento46 páginasConfiguracion Basica Rectificador Vertiv Netsure Serie 701 18 KWJorge100% (1)
- Catlogo Luminaria para Piso CompressedDocumento2 páginasCatlogo Luminaria para Piso CompressedBrandon Martinez MarconiAún no hay calificaciones
- 1014D Osciloscopio en Español VERSIONDocumento11 páginas1014D Osciloscopio en Español VERSIONAndres Acevedo100% (2)
- SISTEMAS TrifasicosDocumento19 páginasSISTEMAS TrifasicosÁlvaro CastroAún no hay calificaciones
- Practica 3. CAPACITANCIA Y CAPACITORESDocumento12 páginasPractica 3. CAPACITANCIA Y CAPACITORESAngel GarciaAún no hay calificaciones
- Es518318 SCHDocumento29 páginasEs518318 SCHRichard SejasAún no hay calificaciones
- Tecnológico de Estudios Superiores de Coacalco Tecnológico de Estudios Superiores de CoacalcoDocumento52 páginasTecnológico de Estudios Superiores de Coacalco Tecnológico de Estudios Superiores de CoacalcoMafe GutierrezAún no hay calificaciones
- Comoponentes ElectronicosDocumento65 páginasComoponentes ElectronicosLuis Antonio AsprillaAún no hay calificaciones
- GLOSARIO de Car AudioDocumento72 páginasGLOSARIO de Car Audioapi-3699022Aún no hay calificaciones
- Transformadores de MedidaDocumento5 páginasTransformadores de MedidaDavid MiseAún no hay calificaciones
- Como Leer El Código de Los Transistores.Documento13 páginasComo Leer El Código de Los Transistores.Eduardo Luis LicetAún no hay calificaciones
- Tipos de Uniones Eléctricas y Aplicaciones...Documento9 páginasTipos de Uniones Eléctricas y Aplicaciones...Antony Alexander Piña ColinaAún no hay calificaciones
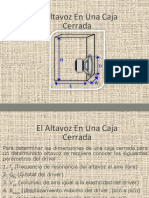
- Altavoz en Una Caja CerradaDocumento26 páginasAltavoz en Una Caja CerradaDvd SancaAún no hay calificaciones
- Ficha de Levantamiento de Información Inventario Patrimonial Al 31-12-2019 Hospital Departamental de HuancavelicaDocumento1025 páginasFicha de Levantamiento de Información Inventario Patrimonial Al 31-12-2019 Hospital Departamental de HuancavelicaGean Piere Castillo GutierrezAún no hay calificaciones
- Interruptores de Potencia Al Vac - o SION 3AE5 y 3AE1 - Cat - Logo HG 11 02 - 2015 - 201702211509317610Documento102 páginasInterruptores de Potencia Al Vac - o SION 3AE5 y 3AE1 - Cat - Logo HG 11 02 - 2015 - 201702211509317610Michel León FrancoAún no hay calificaciones
- Instalación de Poste MT de CAC Subsanación de Deficiencia 228 22.01.2019Documento10 páginasInstalación de Poste MT de CAC Subsanación de Deficiencia 228 22.01.2019CJTonyAún no hay calificaciones