También podría gustarte
- Robótica: enfoque computacional: Transformaciones espaciales, planificación de trayectorias, cinemática, dinámica y control de robotsDe EverandRobótica: enfoque computacional: Transformaciones espaciales, planificación de trayectorias, cinemática, dinámica y control de robotsAún no hay calificaciones
- Dinámica de estructuras: Sistemas de un grado de libertadDe EverandDinámica de estructuras: Sistemas de un grado de libertadCalificación: 4.5 de 5 estrellas4.5/5 (4)
- Plataforma StewartDocumento6 páginasPlataforma StewartPipeGo100% (2)
- Cinemática Inversa de RobotsDocumento5 páginasCinemática Inversa de RobotsAcus Xelor Imperium TemporeAún no hay calificaciones
- Denavit HartenbergDocumento12 páginasDenavit HartenbergMinerva VargasAún no hay calificaciones
- Modelo Cinemático Directo Del Robot CRS Robotics A465Documento29 páginasModelo Cinemático Directo Del Robot CRS Robotics A465FernandoAún no hay calificaciones
- Examen Primer Parcial RobóticaDocumento2 páginasExamen Primer Parcial RobóticaALFREDO ARAUCO GOYTIAAún no hay calificaciones
- Ejercicios Primer Examen ParcialDocumento4 páginasEjercicios Primer Examen ParcialAlonso ReynaAún no hay calificaciones
- Mecanismos - Becerra.Berrones - IA.Investigacion U5Documento7 páginasMecanismos - Becerra.Berrones - IA.Investigacion U5Asiel BecerraAún no hay calificaciones
- Brazo Robotico de 5 GLDDocumento15 páginasBrazo Robotico de 5 GLDWALTER MAX MONTAÑO CAMACHOAún no hay calificaciones
- 4.marco Teorico: 1. Grados de Libertad (GDL) O MovilidadDocumento10 páginas4.marco Teorico: 1. Grados de Libertad (GDL) O MovilidadYeltsin Yanqui GamboaAún no hay calificaciones
- Guía de Laboratorio 6 - MecanismosDocumento7 páginasGuía de Laboratorio 6 - MecanismosAdrian MejiasAún no hay calificaciones
- Trabajo 14Documento6 páginasTrabajo 14Ricardo RivasAún no hay calificaciones
- Unidad 5 MecanismosssssssssssssssssDocumento20 páginasUnidad 5 MecanismosssssssssssssssssPato Kaceres83% (12)
- Poster em ManuelDocumento1 páginaPoster em Manuelemmanuel_htaAún no hay calificaciones
- 1er Parcial 2do Taller PDFDocumento2 páginas1er Parcial 2do Taller PDFCristian Bravo MartinezAún no hay calificaciones
- ITV2014 - Espaciamiento de Los Puntos de Precision 52 PDFDocumento7 páginasITV2014 - Espaciamiento de Los Puntos de Precision 52 PDFLalo CF50% (2)
- Mecanismos de 4 BarrasDocumento18 páginasMecanismos de 4 BarrasElton GuadarramaAún no hay calificaciones
- ActividadGrupal 2Documento45 páginasActividadGrupal 2Alexander TelloAún no hay calificaciones
- PoleasDocumento11 páginasPoleasMarcos SantiagoAún no hay calificaciones
- Listo para Exponer MecanismosDocumento34 páginasListo para Exponer MecanismosAnderson RamirezAún no hay calificaciones
- 9 Trabajo2Documento15 páginas9 Trabajo2Kelly Arrazola SalasAún no hay calificaciones
- Unidad 5 PDFDocumento17 páginasUnidad 5 PDFJuana MoralesAún no hay calificaciones
- ACTIVIDAD No. 1 U5. Análisis y Síntesis de MecanismosDocumento11 páginasACTIVIDAD No. 1 U5. Análisis y Síntesis de MecanismosCarlos GuzmánAún no hay calificaciones
- Taller Tercer ParcialCap5y6Documento2 páginasTaller Tercer ParcialCap5y6Gustavo GutiérrezAún no hay calificaciones
- Sintesis de MecanismosDocumento36 páginasSintesis de MecanismosAnonymous Ntu0EZXTaD80% (5)
- InformeDocumento18 páginasInformePaola Maribel GuamanAún no hay calificaciones
- Introduccion Síntesis de MecanismosDocumento4 páginasIntroduccion Síntesis de MecanismosAhyya100% (1)
- U1 Robotica PDFDocumento10 páginasU1 Robotica PDFAlex BanalexAún no hay calificaciones
- Unidad 5Documento17 páginasUnidad 5Leeo Guerrero95% (43)
- Análisis de La Trayectoria de Un Mecanismo Paralelo Tipo Pantógrafo Mediante Su Matriz JacobianaDocumento9 páginasAnálisis de La Trayectoria de Un Mecanismo Paralelo Tipo Pantógrafo Mediante Su Matriz JacobianaHECTOR JAIME JARAMILLO MORALESAún no hay calificaciones
- Brazo Robótico 5GDL Procesos de Vacunacion de Ganado1Documento18 páginasBrazo Robótico 5GDL Procesos de Vacunacion de Ganado1Jhoel MedranoAún no hay calificaciones
- Mecanismos Unidad 2Documento12 páginasMecanismos Unidad 2Jose Salaya JuventahinoAún no hay calificaciones
- Invesigacion Sobre Desacolamiento CinematicoDocumento10 páginasInvesigacion Sobre Desacolamiento CinematicoULISES HURTADO TREJOAún no hay calificaciones
- Reporte de Teor A de Mecanismos y M QuinasDocumento6 páginasReporte de Teor A de Mecanismos y M QuinasMiguel Angel TexocotitlaAún no hay calificaciones
- Proyecto Mecanismos Cedillo Sandoval Ricardo HiramDocumento36 páginasProyecto Mecanismos Cedillo Sandoval Ricardo HiramRicardo SandovalAún no hay calificaciones
- TMM 2022 2 L2Documento22 páginasTMM 2022 2 L2RICARDO ALEXANDER LAZARO SANCHEZAún no hay calificaciones
- Sintesis de MecanismosDocumento40 páginasSintesis de MecanismoscromerobarrenoAún no hay calificaciones
- Síntesis CinemáticaDocumento6 páginasSíntesis CinemáticaEduardo Michel LopezAún no hay calificaciones
- Robo Parcial 1 20120Documento3 páginasRobo Parcial 1 20120brandoAún no hay calificaciones
- Mecanismo de 4 BarrasDocumento16 páginasMecanismo de 4 BarrasedutintaAún no hay calificaciones
- Brazo Robótico 5GDL BroDocumento15 páginasBrazo Robótico 5GDL BroDennis J Mujik100% (1)
- Diseno Mecatronico Estudio y Modelamiento Robot KukaDocumento10 páginasDiseno Mecatronico Estudio y Modelamiento Robot Kukadario mendozaAún no hay calificaciones
- Sintesis de MecanismosDocumento7 páginasSintesis de MecanismosViktor Hernandez0% (1)
- Brazo Robotico GripperDocumento15 páginasBrazo Robotico GripperGordon NorfcothAún no hay calificaciones
- Laboratorio 5 2022Documento6 páginasLaboratorio 5 2022ACórdoba 3120Aún no hay calificaciones
- Preguntas Orientadoras EF y LRDocumento4 páginasPreguntas Orientadoras EF y LRMartin HerreraAún no hay calificaciones
- PracticaDocumento7 páginasPracticaLeonardoAún no hay calificaciones
- Sintesis de MecanismosDocumento10 páginasSintesis de MecanismosAdolfo Mendo AdanAún no hay calificaciones
- Examenes AdemDocumento3 páginasExamenes AdemSergio GPAún no hay calificaciones
- Mecanismo 4 BarrasDocumento29 páginasMecanismo 4 BarrasLuis Alejandro Carrillo SuárezAún no hay calificaciones
- Manual Prácticas MecanismosDocumento39 páginasManual Prácticas MecanismosHoracio Guadarrama CadenaAún no hay calificaciones
- Informe Mecanismos 3 CorteDocumento11 páginasInforme Mecanismos 3 Cortejean carlos ortegaAún no hay calificaciones
- Reporte #1 Conceptos Básicos de DinámicaDocumento9 páginasReporte #1 Conceptos Básicos de DinámicaRicardo Ruiz DavilaAún no hay calificaciones
- Portafolio Laboratorio de DinamicaDocumento36 páginasPortafolio Laboratorio de DinamicaPolo ElizaldeAún no hay calificaciones
- Diferencias Entre Modelo Cinemático Directo e InversoDocumento3 páginasDiferencias Entre Modelo Cinemático Directo e Inversoferchymol100% (1)
- Capítulo - 2 DinámicaDocumento30 páginasCapítulo - 2 DinámicaMiguel PérezAún no hay calificaciones
- Articulo de Modelo Dinamico y Cinematico de Un RobotDocumento9 páginasArticulo de Modelo Dinamico y Cinematico de Un RobotRonny YupanquiAún no hay calificaciones
- Síntesis Analítica de Mecanismos. Sistemas MecánicosDocumento23 páginasSíntesis Analítica de Mecanismos. Sistemas Mecánicosalbertocc1978Aún no hay calificaciones
- UF1253 - Diagnóstico de deformaciones estructuralesDe EverandUF1253 - Diagnóstico de deformaciones estructuralesAún no hay calificaciones
- UNIDAD No 2 EJERCICIO 1Documento9 páginasUNIDAD No 2 EJERCICIO 1Jason ClementeAún no hay calificaciones
- Aaaaaa Digital ActualizadoDocumento66 páginasAaaaaa Digital ActualizadoJason ClementeAún no hay calificaciones
- Trabajo Investigación Tema 4 (N°c.18500311)Documento32 páginasTrabajo Investigación Tema 4 (N°c.18500311)Jason ClementeAún no hay calificaciones
- Unidad Iv RodamientosDocumento61 páginasUnidad Iv RodamientosJason ClementeAún no hay calificaciones
- Sólido SemiinfinitoDocumento6 páginasSólido SemiinfinitoJason ClementeAún no hay calificaciones
- Juntas Universales y Su Aplicación (U2)Documento11 páginasJuntas Universales y Su Aplicación (U2)Jason ClementeAún no hay calificaciones
- Ecuaciones Diferenciales Unidad 4Documento28 páginasEcuaciones Diferenciales Unidad 4Jason Clemente0% (1)
- Aplicación de Las Series de FourierDocumento1 páginaAplicación de Las Series de FourierJason ClementeAún no hay calificaciones
- Cilos EcónomicosDocumento24 páginasCilos EcónomicosJason ClementeAún no hay calificaciones
- Unidad 4Documento21 páginasUnidad 4Jason ClementeAún no hay calificaciones
- Biografía de Abraham LincolnDocumento1 páginaBiografía de Abraham LincolnJason ClementeAún no hay calificaciones
- Redes Abiertas y Redes Cerradas PDFDocumento34 páginasRedes Abiertas y Redes Cerradas PDFSsauúl Ghalvhan100% (2)
- ORONA Arca Manual PDFDocumento300 páginasORONA Arca Manual PDFVilla Robert Ramoa92% (12)
- Transformación de La Energía en Una Turbina de VaporDocumento15 páginasTransformación de La Energía en Una Turbina de VaporYsik RodriGuez100% (2)
- BalotarioDocumento5 páginasBalotarioJenifer RamosAún no hay calificaciones
- Modelado de Circuito ElectricosDocumento11 páginasModelado de Circuito ElectricosMolina Jorge Luis50% (2)
- Definiciones y ConceptosDocumento33 páginasDefiniciones y ConceptosNelson AltamarAún no hay calificaciones
- Bernardo Yacimiento Tercer CorteDocumento3 páginasBernardo Yacimiento Tercer CorteBernardo RojasAún no hay calificaciones
- Whirlpool Awt 2250 3Documento9 páginasWhirlpool Awt 2250 3Alma García de la ObraAún no hay calificaciones
- Practica de Laboratorio 4Documento6 páginasPractica de Laboratorio 4Anderson CastellanosAún no hay calificaciones
- Jorge Duran - FisicaDocumento3 páginasJorge Duran - FisicaDaniel Duran Olivares100% (1)
- Calibración de Un Probador BidireccionalDocumento9 páginasCalibración de Un Probador Bidireccionalandresfreak100% (1)
- Compe Quimica TrilceDocumento462 páginasCompe Quimica TrilceGianmarcoSugarAventurero100% (4)
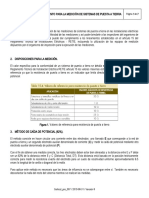
- 007 - Procedimiento de Medicion de Sistemas de Puesta A Tierra V8Documento7 páginas007 - Procedimiento de Medicion de Sistemas de Puesta A Tierra V8Karina Luna100% (1)
- Dinamica Ejercicios Examen 1º BachilleratoDocumento6 páginasDinamica Ejercicios Examen 1º BachilleratoMaria RepisoAún no hay calificaciones
- 1 2014 Curso Transferencia de Calor Introduccion Pedro Flores SeerDocumento66 páginas1 2014 Curso Transferencia de Calor Introduccion Pedro Flores SeerJonathan Bryan Lazarte Calderon0% (1)
- 7 Inductancia IDocumento8 páginas7 Inductancia IMauricio Montaño Saavedra100% (1)
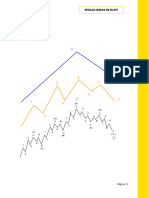
- Reglas Ondas de ElliotDocumento15 páginasReglas Ondas de ElliotSamuel SorianoAún no hay calificaciones
- Sem 7 - Creacion y Aniquilacion de ParesDocumento11 páginasSem 7 - Creacion y Aniquilacion de ParesAlfredo IvanAún no hay calificaciones
- IEEE 519 (Limites para Armonicos)Documento5 páginasIEEE 519 (Limites para Armonicos)David RodriguezAún no hay calificaciones
- Cartilla Tercero 2da Parte - DotDocumento125 páginasCartilla Tercero 2da Parte - DotReul NeitorAún no hay calificaciones
- Nat. de Las Soluciones - Equilibrio QuímicoDocumento9 páginasNat. de Las Soluciones - Equilibrio QuímicoSofia CbaAún no hay calificaciones
- Práctica 1 Física IIIDocumento7 páginasPráctica 1 Física III3IM12MuñozJiménez VictorAún no hay calificaciones
- Proyecto de Pistas y Veredas-DesbloqueadoDocumento8 páginasProyecto de Pistas y Veredas-DesbloqueadonelsonAún no hay calificaciones
- 02.1-Acciones Sísmicas en Edif Acero (GVC)Documento27 páginas02.1-Acciones Sísmicas en Edif Acero (GVC)JASAMICUAún no hay calificaciones
- Grado de Reacción de Una Turbo Máquina y Su Ecuación para CalcularlaDocumento6 páginasGrado de Reacción de Una Turbo Máquina y Su Ecuación para CalcularlaTanya PasaperaAún no hay calificaciones
- Ecuaciones Del Movimiento Circular UniformeDocumento21 páginasEcuaciones Del Movimiento Circular UniformeAlexsacerdoteAún no hay calificaciones
- Examen Diario Ultimo 23 de JulioDocumento1 páginaExamen Diario Ultimo 23 de JulioYuber Alex PanccaAún no hay calificaciones
- Generador de Van GoffDocumento3 páginasGenerador de Van GoffJasiel SanchezAún no hay calificaciones