También podría gustarte
- Electricidad Del AutomóvilDocumento86 páginasElectricidad Del Automóviljonny david martinez perez100% (1)
- Diagrama de Nyquist para evaluar estabilidadDocumento4 páginasDiagrama de Nyquist para evaluar estabilidadKevin Ascue ContrerasAún no hay calificaciones
- G 1932RS, 6RS, 3246RS, 10RS JLG Operation SpanishDocumento114 páginasG 1932RS, 6RS, 3246RS, 10RS JLG Operation SpanishEdo RamAún no hay calificaciones
- Cfis332 Pre ExamenDocumento10 páginasCfis332 Pre Examenbenjamin pAún no hay calificaciones
- Apuntes de Cálculo Multivariable.Documento72 páginasApuntes de Cálculo Multivariable.Henry Lazaro Cano100% (1)
- Límites de funciones y cálculo de indeterminacionesDocumento12 páginasLímites de funciones y cálculo de indeterminacionesJorge Daniel HernandezAún no hay calificaciones
- Ficha Tecnica Nonil FenolDocumento2 páginasFicha Tecnica Nonil Fenolheidy paola del castillo carrilloAún no hay calificaciones
- Practica 7Documento6 páginasPractica 7David DominguezAún no hay calificaciones
- Números Complejos 2020Documento115 páginasNúmeros Complejos 2020profe.migueljimenez1Aún no hay calificaciones
- PLSQL 5 2Documento28 páginasPLSQL 5 2JulieFcastroAún no hay calificaciones
- Implementacion de Una Red TelematicaDocumento9 páginasImplementacion de Una Red TelematicaErik Leonardo Yerbasanta JaraAún no hay calificaciones
- La filosofía de Bruce Lee en 40 palabras o menosDocumento167 páginasLa filosofía de Bruce Lee en 40 palabras o menosAlex PBX cg100% (1)
- PRINCIPIOS FUNDAMENTALES DE CONTEO Y PERMUTACIONESDocumento24 páginasPRINCIPIOS FUNDAMENTALES DE CONTEO Y PERMUTACIONESjoselito50% (2)
- Tanque Elevado Sap2000 PDFDocumento108 páginasTanque Elevado Sap2000 PDFbeto032121100% (1)
- Tabla de Integrales InmediatasDocumento1 páginaTabla de Integrales InmediatasMIRIAMAún no hay calificaciones
- Funciones Python Tarea 9Documento2 páginasFunciones Python Tarea 9DonGerardAún no hay calificaciones
- MCD y MCM en álgebraDocumento18 páginasMCD y MCM en álgebraJuanito Zavala100% (1)
- PrácticaDocumento20 páginasPrácticaKendry PerezAún no hay calificaciones
- Propiedades LogaritmicasDocumento19 páginasPropiedades Logaritmicaslduran_63Aún no hay calificaciones
- Precisión Semántica 1.2.3.4Documento4 páginasPrecisión Semántica 1.2.3.4Slifer Spiz Amarillo100% (1)
- Amplificadores DiscretosDocumento51 páginasAmplificadores DiscretosJalimRoye100% (1)
- Actividad Clases DemostrativasDocumento1 páginaActividad Clases DemostrativasSabina Lozano50% (2)
- T2 JavierMeza 6334Documento12 páginasT2 JavierMeza 6334Bryan JavierAún no hay calificaciones
- Marco Teórico - OficialDocumento12 páginasMarco Teórico - OficialEdward Gary Marthans VargasAún no hay calificaciones
- Introducción A La AlgoritmiaDocumento251 páginasIntroducción A La AlgoritmializitaAún no hay calificaciones
- Actividad 8.1-RealizadoDocumento7 páginasActividad 8.1-RealizadoCristian CastellonAún no hay calificaciones
- Guía de Probabilidad y EstadísticaDocumento20 páginasGuía de Probabilidad y EstadísticaIsrael PerezAún no hay calificaciones
- Derivada DireccionalDocumento14 páginasDerivada DireccionalOlinto LopezAún no hay calificaciones
- Beneficios subprocesamiento JavaDocumento6 páginasBeneficios subprocesamiento JavaRoberto Ivan Santiago Hernandez100% (1)
- 01 Ejercicios ER SGBD IkasleentzatDocumento15 páginas01 Ejercicios ER SGBD IkasleentzathunterAún no hay calificaciones
- Evolucion de La Función CuadráticaDocumento5 páginasEvolucion de La Función CuadráticaSandra peinadoAún no hay calificaciones
- 1criterios de Selección SCADADocumento4 páginas1criterios de Selección SCADATathie BolañoAún no hay calificaciones
- Cultura Tributaria - 50 Preguntas y Respuestas PDFDocumento32 páginasCultura Tributaria - 50 Preguntas y Respuestas PDFLucesita DiestraAún no hay calificaciones
- Integrales TriplesDocumento23 páginasIntegrales TriplesleoelectricoAún no hay calificaciones
- Fuguras Compuestas 7 BasicpDocumento25 páginasFuguras Compuestas 7 BasicpaldoAún no hay calificaciones
- Aritmética Matematica - San MarcosDocumento204 páginasAritmética Matematica - San MarcosJavier TenorioAún no hay calificaciones
- GUIA PAES - MATEMATICA - Prof. GaldámezDocumento44 páginasGUIA PAES - MATEMATICA - Prof. GaldámezDavid GaldamezAún no hay calificaciones
- Ejercicio C++ Con CaseDocumento5 páginasEjercicio C++ Con CaseDiego Ashtu SosaAún no hay calificaciones
- Notacion para Las Derivadas ParcialesDocumento19 páginasNotacion para Las Derivadas ParcialesMilagros VictoriaAún no hay calificaciones
- FUNDREDESYTEL IIbimestre FabianMachado2 PDFDocumento2 páginasFUNDREDESYTEL IIbimestre FabianMachado2 PDFFaber KingAún no hay calificaciones
- Matemática para Ciencias Económicas I Ma1022 ExamenDocumento2 páginasMatemática para Ciencias Económicas I Ma1022 ExamenHelen A MenaAún no hay calificaciones
- Te Gusta Electrónica - Este Es Tu Post! (MegaPost) - Taringa!Documento15 páginasTe Gusta Electrónica - Este Es Tu Post! (MegaPost) - Taringa!sil.vermercurio100% (1)
- Funciones y variables dependientes e independientesDocumento3 páginasFunciones y variables dependientes e independientesmelissa naranjoAún no hay calificaciones
- La Hechicera Cronicas de La Prehistoria IVDocumento1 páginaLa Hechicera Cronicas de La Prehistoria IVRosa Adriana García0% (1)
- Guia Examen MT Calculo MultivariadoDocumento10 páginasGuia Examen MT Calculo MultivariadoPedroAlejandroGarciaAún no hay calificaciones
- Practica 5Documento5 páginasPractica 5JCHAHUAJAún no hay calificaciones
- Saavedra Cornelio Documentos Relativos A La Ocupacic3b3n de Arauco PDFDocumento449 páginasSaavedra Cornelio Documentos Relativos A La Ocupacic3b3n de Arauco PDFJuan Carlos Painequeo SánchezAún no hay calificaciones
- Ejercicios Resueltos Topologia E NietoDocumento167 páginasEjercicios Resueltos Topologia E NietoHempler Barragán100% (1)
- Rectas Planos SuperficiesDocumento9 páginasRectas Planos SuperficiesAnonymous yYbzZAQbAún no hay calificaciones
- Aclarado y Obscurecimiento de ImágenesDocumento5 páginasAclarado y Obscurecimiento de ImágenesegeraaAún no hay calificaciones
- Material de Preparacion - Segunda Fase ONEM 2012 - Nivel II - 002Documento4 páginasMaterial de Preparacion - Segunda Fase ONEM 2012 - Nivel II - 002viterick100% (1)
- Diseño y Montaje de EscaparatesDocumento3 páginasDiseño y Montaje de EscaparatesM Angeles Osorio MolinaAún no hay calificaciones
- Documento Visión-Ejemplo Diseño de SoftwareDocumento17 páginasDocumento Visión-Ejemplo Diseño de SoftwareDavid JdAún no hay calificaciones
- Laboratorio Ley OHMDocumento9 páginasLaboratorio Ley OHMDiego Galeano100% (1)
- Curso Robot CDocumento11 páginasCurso Robot CIngrid ZepedaAún no hay calificaciones
- Tutorial Gimp Archivos Eps en Gimp!Documento19 páginasTutorial Gimp Archivos Eps en Gimp!aquajamo100% (1)
- Lenguaje Ensamblador 8086 Plan 2009Documento70 páginasLenguaje Ensamblador 8086 Plan 2009YHONATAN SMITH YLACCANA CORDOVAAún no hay calificaciones
- TALLER No 2 Estad Stica DescriptivaDocumento4 páginasTALLER No 2 Estad Stica DescriptivaKriztian AponteAún no hay calificaciones
- Ejercicios de Estructuras RepetitivasDocumento8 páginasEjercicios de Estructuras RepetitivasJulio Llamas GeronimoAún no hay calificaciones
- Pruebas UnitariasDocumento9 páginasPruebas UnitariasErik Daniel Andrade IrigoyenAún no hay calificaciones
- Captura de Pantalla 2023-09-20 A La(s) 7.02.53 P.M.Documento17 páginasCaptura de Pantalla 2023-09-20 A La(s) 7.02.53 P.M.gqgqh5zk5t100% (1)
- 3 Manual Planea 2016Documento100 páginas3 Manual Planea 2016Omar ST LjcAún no hay calificaciones
- Derivadas ParcialesDocumento13 páginasDerivadas ParcialesChristopher MéndezAún no hay calificaciones
- Funciones Reales de Varias VariablesDocumento13 páginasFunciones Reales de Varias Variables22e50156iaeAún no hay calificaciones
- UNIDAD No.1 Lab SuelosDocumento14 páginasUNIDAD No.1 Lab SuelosBrightsun VenturaAún no hay calificaciones
- Santo Domingo Este 2019Documento4 páginasSanto Domingo Este 2019cup2020Aún no hay calificaciones
- Analisis de Cargas (Repaso)Documento2 páginasAnalisis de Cargas (Repaso)Brightsun VenturaAún no hay calificaciones
- Tema 2 Diseño EstrucuralDocumento10 páginasTema 2 Diseño EstrucuralBrightsun VenturaAún no hay calificaciones
- Tema 1.mecánica de Suelos II .FINAL PDFDocumento21 páginasTema 1.mecánica de Suelos II .FINAL PDFBrightsun VenturaAún no hay calificaciones
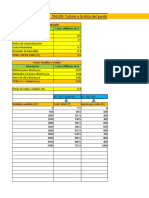
- Plantilla Excel Punto de Equilibrio MORATIVADocumento6 páginasPlantilla Excel Punto de Equilibrio MORATIVAJulio James ZeaAún no hay calificaciones
- Asignacion2 - Tema 1 - CuestionarioDocumento4 páginasAsignacion2 - Tema 1 - CuestionarioYan GomAún no hay calificaciones
- Presentación de RutasDocumento7 páginasPresentación de RutasSimónAún no hay calificaciones
- Lista Orientadora de Mano de ObraDocumento10 páginasLista Orientadora de Mano de ObraBAE NegociosAún no hay calificaciones
- Decreto 1594 de 1984 Usos Del Agua y Residuos LiquidosDocumento59 páginasDecreto 1594 de 1984 Usos Del Agua y Residuos LiquidosJeimy GutierrezAún no hay calificaciones
- Área: Ciencia Y Tecnologia Grado: Primero: Matriz Curricular 2022Documento16 páginasÁrea: Ciencia Y Tecnologia Grado: Primero: Matriz Curricular 2022Tenshi Roberto Huayhua MedranoAún no hay calificaciones
- Examne Bimestral 3er BimestreDocumento10 páginasExamne Bimestral 3er BimestreJosé Antonio MaquénAún no hay calificaciones
- AdmisiónDocumento4 páginasAdmisiónVane LdsmaAún no hay calificaciones
- Hepatopatias en El Perro y El Gato ComprDocumento50 páginasHepatopatias en El Perro y El Gato ComprMario MarineroAún no hay calificaciones
- Bestias del CaosDocumento32 páginasBestias del CaosEnrique LaraAún no hay calificaciones
- Ilovepdf MergedDocumento78 páginasIlovepdf MergedMaycol LojanAún no hay calificaciones
- Proyecto 4 - Semana 1 - EgbDocumento7 páginasProyecto 4 - Semana 1 - EgbSissi DelgadoAún no hay calificaciones
- Monografia Etica ProfesionalDocumento24 páginasMonografia Etica ProfesionalYudith GuaraAún no hay calificaciones
- Iberdrola Oferta 1035800410100000Documento20 páginasIberdrola Oferta 1035800410100000JcAún no hay calificaciones
- Planillas Morbilidades Preexistentes3Documento18 páginasPlanillas Morbilidades Preexistentes3katerine caballeroAún no hay calificaciones
- ORDOVICICODocumento35 páginasORDOVICICOHenry Gonzales YanaAún no hay calificaciones
- DS - DS9927 - Es - Es - 1238 (990.27)Documento10 páginasDS - DS9927 - Es - Es - 1238 (990.27)fernandaAún no hay calificaciones
- Apu InicialDocumento38 páginasApu InicialRuben MarquinaAún no hay calificaciones
- Mapa Conceptual TermodinamicaDocumento1 páginaMapa Conceptual TermodinamicaJosé GonzálezAún no hay calificaciones
- Evidencia de Tarea 4 OSMORREGULACIONDocumento16 páginasEvidencia de Tarea 4 OSMORREGULACIONCardenas Stella100% (1)
- Presentacion Juan Carlos RuizDocumento17 páginasPresentacion Juan Carlos Ruizjuan carlos ruiz romeroAún no hay calificaciones
- Trabalenguas 1Documento2 páginasTrabalenguas 1Piter CapiaAún no hay calificaciones
- Resumen Resolución 0491 de 2020Documento3 páginasResumen Resolución 0491 de 2020Nikolas PeñaAún no hay calificaciones
- MATERIALES PÉTREOS y Depositos AluvialesDocumento4 páginasMATERIALES PÉTREOS y Depositos AluvialesHelenaAún no hay calificaciones