También podría gustarte
- Pinout Peugeot 306 Boch MP 7.2Documento6 páginasPinout Peugeot 306 Boch MP 7.2ramon hidalgo0% (1)
- Pinout Peugeot306Documento3 páginasPinout Peugeot306ramon hidalgo100% (1)
- Cómo Revertir Una RupturaDocumento7 páginasCómo Revertir Una RupturarecuperarunamorAún no hay calificaciones
- 7 PDFDocumento4 páginas7 PDFJavi ColoAún no hay calificaciones
- Señales Y Sistemas 2Documento1 páginaSeñales Y Sistemas 2Hilary SalinasAún no hay calificaciones
- ARM FormularioDocumento10 páginasARM FormulariojuceAún no hay calificaciones
- Sepolveda: PeñarandaDocumento6 páginasSepolveda: PeñarandaJuliana SepulvedaAún no hay calificaciones
- IEP-BABD U3Documento2 páginasIEP-BABD U3Director de planta CMAAún no hay calificaciones
- Ayudantía 1Documento2 páginasAyudantía 1RICARDO SCHEELAún no hay calificaciones
- Elman - TikTok y El Fin de La Globalización VER PREGUNTASDocumento16 páginasElman - TikTok y El Fin de La Globalización VER PREGUNTASAngélica EspinelAún no hay calificaciones
- Gmail - Pasó McCarthy y Dijo Che, No DaDocumento16 páginasGmail - Pasó McCarthy y Dijo Che, No DaAngélica EspinelAún no hay calificaciones
- Tomas, L El Nadador Trans Que Ganó Demasiado 2Documento9 páginasTomas, L El Nadador Trans Que Ganó Demasiado 2Juan Pablo DuarteAún no hay calificaciones
- Renault Scenic 2.ol 2003Documento1 páginaRenault Scenic 2.ol 2003noeAún no hay calificaciones
- Sistema de Admision Peugeot 306Documento5 páginasSistema de Admision Peugeot 306ramon hidalgoAún no hay calificaciones
- Elman - Todos Despiden A La Globalización Menos VosDocumento14 páginasElman - Todos Despiden A La Globalización Menos VosAngélica EspinelAún no hay calificaciones
- Prueba CalculoDocumento4 páginasPrueba CalculoGaby MartinezAún no hay calificaciones
- Repaso Pc2Documento13 páginasRepaso Pc2María Gracia Cobeña VillanuevaAún no hay calificaciones
- Primera PlantaDocumento1 páginaPrimera PlantaCarlos BracamonteAún no hay calificaciones
- Tiringuis TinguisDocumento2 páginasTiringuis Tinguisjohn.angelAún no hay calificaciones
- Elman - No Voy A Pagar Por Esta MierdaDocumento15 páginasElman - No Voy A Pagar Por Esta MierdaAngélica EspinelAún no hay calificaciones
- Laboratorio IV - VDocumento6 páginasLaboratorio IV - VJuan Pablo TiqueAún no hay calificaciones
- NTP 613Documento41 páginasNTP 613angelAún no hay calificaciones
- Relatorio de Usuarios 23 May 2018Documento6 páginasRelatorio de Usuarios 23 May 2018Augusto CedaroAún no hay calificaciones
- Paul Washer Libro Escato - 15Documento13 páginasPaul Washer Libro Escato - 15Franklin Moreira100% (2)
- CirculoDocumento5 páginasCirculoFernanda Nicole Alanoca MonterrosoAún no hay calificaciones
- Tarea Estática y EquilibrioDocumento23 páginasTarea Estática y EquilibrioScribd JhonnyAún no hay calificaciones
- Resumen de Resultados Torre Sl2Documento2 páginasResumen de Resultados Torre Sl2Joaquin Diaz CandeloAún no hay calificaciones
- Sistema de Encendido Peugeot 306Documento3 páginasSistema de Encendido Peugeot 306ramon hidalgo100% (2)
- Clase 4.3Documento6 páginasClase 4.3Edgar MuzoAún no hay calificaciones
- Octavio Ianni El Estado Oligarquico PDFDocumento1 páginaOctavio Ianni El Estado Oligarquico PDFHugo AndradeAún no hay calificaciones
- Tareo para TractoreoDocumento1 páginaTareo para TractoreoRonald Ismael Huaracha cayteAún no hay calificaciones
- Pauta Certamen N 1 PDFDocumento4 páginasPauta Certamen N 1 PDFElías Ulloa VegaAún no hay calificaciones
- Para Una Lectura de Facundo, de D. F Sarmiento JitrikDocumento10 páginasPara Una Lectura de Facundo, de D. F Sarmiento JitrikAngélica EspinelAún no hay calificaciones
- Mapa 2Documento1 páginaMapa 2AXEL GABRIEL MORON MOZOAún no hay calificaciones
- Niif Desde Un Punto de Vista PrácticoDocumento26 páginasNiif Desde Un Punto de Vista PrácticoJonatan Christopher PEREZ BELLOAún no hay calificaciones
- Primer Piso Azotea Segundo, Tercer Y Cuarto Piso: TD3 TD4Documento1 páginaPrimer Piso Azotea Segundo, Tercer Y Cuarto Piso: TD3 TD4GIANCARLO CHUMBES TRUJILLOAún no hay calificaciones
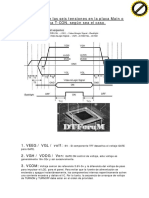
- La Función de Las Seis Tensiones en La Placa Main o Placa TDocumento2 páginasLa Función de Las Seis Tensiones en La Placa Main o Placa Tslayer3233Aún no hay calificaciones
- Datos Laboratorio FundidaDocumento1 páginaDatos Laboratorio FundidaDogo HeinemanAún no hay calificaciones
- Transferencia de CalorDocumento16 páginasTransferencia de CalorEnrique Flores OlivaresAún no hay calificaciones
- 500ranchpony WirediagramDocumento1 página500ranchpony Wirediagramarles nuñezAún no hay calificaciones
- Clave de Recuperación de Cifrado de Unidad BitLockerDocumento1 páginaClave de Recuperación de Cifrado de Unidad BitLockermafepearAún no hay calificaciones
- BOHM BAWERK - Una-contradiccion-no-resuelta-en-el-sistema-economico-Marxista - PDFDocumento135 páginasBOHM BAWERK - Una-contradiccion-no-resuelta-en-el-sistema-economico-Marxista - PDFjuancahermida3056Aún no hay calificaciones
- Curriculum Vitae Marcelo Berrotarán - CompletoDocumento4 páginasCurriculum Vitae Marcelo Berrotarán - CompletoMarcelo BerrotaránAún no hay calificaciones
- 04 Limite de Sucesiones Ayuda MemoriaDocumento3 páginas04 Limite de Sucesiones Ayuda MemoriaBren LeivaAún no hay calificaciones
- 5 Pasos para Ser Un Líder Indispensable - SoyEntrepreneurDocumento2 páginas5 Pasos para Ser Un Líder Indispensable - SoyEntrepreneurPaulina ChicoGAún no hay calificaciones
- Leyes BásicasDocumento1 páginaLeyes Básicasmario-200Aún no hay calificaciones
- Mapa 3Documento1 páginaMapa 3AXEL GABRIEL MORON MOZOAún no hay calificaciones
- BanescOnline Lunes, 29 de Junio de 2020 07 - 26 - 09 652 AmDocumento1 páginaBanescOnline Lunes, 29 de Junio de 2020 07 - 26 - 09 652 AmAbraham GonzalezAún no hay calificaciones
- Cadena de HabaDocumento76 páginasCadena de HabaCamilo Cachaca MachacaAún no hay calificaciones
- PLANOS Y NIVELES DEL LENGUAJE III Sec.Documento4 páginasPLANOS Y NIVELES DEL LENGUAJE III Sec.gioo oogiAún no hay calificaciones
- ¿Quién Es El Guardián Del Derecho Internacional PúblicoDocumento33 páginas¿Quién Es El Guardián Del Derecho Internacional PúblicoJORGE ARMANDO PEREZ TORREZAún no hay calificaciones
- Apunte ADNDocumento18 páginasApunte ADNRamiro TomásAún no hay calificaciones
- Artesanias Utz PinDocumento1 páginaArtesanias Utz Pink77ttAún no hay calificaciones
- La Estafa InformaticaDocumento96 páginasLa Estafa InformaticaDouglas CubilloAún no hay calificaciones
- Sistema de Contol Peugeot 306Documento5 páginasSistema de Contol Peugeot 306ramon hidalgoAún no hay calificaciones
- 681358762-Turnover-195587611-A100230000640737-1DDD S8Documento1 página681358762-Turnover-195587611-A100230000640737-1DDD S8bidaeugeniuszAún no hay calificaciones
- Sistema de Combustible Peugeot 306Documento4 páginasSistema de Combustible Peugeot 306ramon hidalgoAún no hay calificaciones
- ClaseDocumento16 páginasClaseCielitol Mariam CollantzAún no hay calificaciones
- Manual k63 RAG 2021 Parte 1-1Documento82 páginasManual k63 RAG 2021 Parte 1-1Anonymous cOYX3GRdRBAún no hay calificaciones
- Cronograma Actividades 2017Documento5 páginasCronograma Actividades 2017Alvaro Junior Limachi CalleAún no hay calificaciones
- Coeficiente EstructuralDocumento2 páginasCoeficiente EstructuralAlvaro Junior Limachi CalleAún no hay calificaciones
- Geodesia SaltelitalDocumento6 páginasGeodesia SaltelitalAlvaro Junior Limachi CalleAún no hay calificaciones
- Implementacion de AlcantarilladoDocumento9 páginasImplementacion de AlcantarilladoAlvaro Junior Limachi CalleAún no hay calificaciones
- Puntos GNSSDocumento5 páginasPuntos GNSSAlvaro Junior Limachi CalleAún no hay calificaciones
- Puente Alcantarilla Elementos FinitosDocumento20 páginasPuente Alcantarilla Elementos FinitosAlvaro Junior Limachi Calle100% (1)
- Caratula Instituto Tecnológico Industrial Puerto de MejillonesDocumento3 páginasCaratula Instituto Tecnológico Industrial Puerto de MejillonesAlvaro Junior Limachi CalleAún no hay calificaciones
- Banco de Preguntas y Respuestas de MATEMATICASDocumento32 páginasBanco de Preguntas y Respuestas de MATEMATICASAlvaro Junior Limachi CalleAún no hay calificaciones
- Planilla de Aforo VehicularDocumento2 páginasPlanilla de Aforo VehicularAlvaro Junior Limachi CalleAún no hay calificaciones
- Formulario PreinscripcionDocumento2 páginasFormulario PreinscripcionAlvaro Junior Limachi CalleAún no hay calificaciones
- Práctico 4 Presup Flexible - VarCostos - 2023Documento2 páginasPráctico 4 Presup Flexible - VarCostos - 2023Micaela MenesesAún no hay calificaciones
- Centro Educacional Católico DIDASCALIO SANTA MARIA (Autoguardado)Documento24 páginasCentro Educacional Católico DIDASCALIO SANTA MARIA (Autoguardado)Aurora Soto CastilloAún no hay calificaciones
- Solicitud de Reconocimiento y Pago POR VEJEZ ACTDocumento10 páginasSolicitud de Reconocimiento y Pago POR VEJEZ ACTEdgarMiguelTejadaRamirezAún no hay calificaciones
- $R6PQDZPDocumento6 páginas$R6PQDZPDaniel Felipe GarciaAún no hay calificaciones
- SIGO-F-011 - Mapa de Proceso Piping y OOCC 07-10-2019Documento4 páginasSIGO-F-011 - Mapa de Proceso Piping y OOCC 07-10-2019Roberto Henriquez AriasAún no hay calificaciones
- 02.pala HidraulicaDocumento56 páginas02.pala Hidraulicaalexander100% (4)
- Guia Ejercicios Leyes de NewtonDocumento4 páginasGuia Ejercicios Leyes de NewtonClaudia GonzalezAún no hay calificaciones
- Sesion D2 Tutoria Valoramos Las FamiliasDocumento6 páginasSesion D2 Tutoria Valoramos Las Familiasfull miusic palominoAún no hay calificaciones
- Osmometro Tipo 6Documento16 páginasOsmometro Tipo 6Felix MontemayorAún no hay calificaciones
- 03 Becker, H. - 2008 - Mundos de Arte y Actividad ColectivaDocumento34 páginas03 Becker, H. - 2008 - Mundos de Arte y Actividad ColectivaIratxe Ursua GalarAún no hay calificaciones
- Evaluacion Final - Escenario 8 - PRIMER BLOQUE-CIENCIAS BASICAS - VIRTUAL - ESTADÍSTICA INFERENCIAL - (GRUPO B06) Intento 1Documento9 páginasEvaluacion Final - Escenario 8 - PRIMER BLOQUE-CIENCIAS BASICAS - VIRTUAL - ESTADÍSTICA INFERENCIAL - (GRUPO B06) Intento 1PunkzillaAún no hay calificaciones
- Metricas y Nuevos Escenarios PDFDocumento18 páginasMetricas y Nuevos Escenarios PDFelmerfigueroaAún no hay calificaciones
- Localizacion y ReplanteoDocumento2 páginasLocalizacion y ReplanteoAlexander Humberto Rodriguez CastiblancoAún no hay calificaciones
- Ensayo Sobre VirtualizaciónDocumento3 páginasEnsayo Sobre VirtualizaciónDanny Gianmarco Duarte0% (1)
- Empresa 1 Tarea 6Documento11 páginasEmpresa 1 Tarea 6lushkAún no hay calificaciones
- Residuos IndustrialesDocumento3 páginasResiduos IndustrialesHector Antonio Sandoya SalazarAún no hay calificaciones
- Administracion de Proyectos (Investigacion)Documento16 páginasAdministracion de Proyectos (Investigacion)Ale CLAún no hay calificaciones
- El Pozolero, Albañil Que Disolvió Más de 300 Cadáveres en Sosa CáusticaDocumento5 páginasEl Pozolero, Albañil Que Disolvió Más de 300 Cadáveres en Sosa CáusticaPaula Ochoa Báez100% (1)
- Etapas Del EmbarazoDocumento5 páginasEtapas Del EmbarazoWilfredo Aroldo FuentesAún no hay calificaciones
- TP Macroentorno - ComercializaciónDocumento11 páginasTP Macroentorno - ComercializaciónFlor RoldanAún no hay calificaciones
- Diseño de Un Radioenlace PDFDocumento16 páginasDiseño de Un Radioenlace PDFYuli Jaimes LlancaAún no hay calificaciones
- Literatura de EgiptoDocumento184 páginasLiteratura de EgiptoANDRES FERNANDO GARCIAAún no hay calificaciones
- Flujo de CajaDocumento4 páginasFlujo de CajaLaura SalgadoAún no hay calificaciones
- Red Actualizada PSM (Mayo 2020)Documento44 páginasRed Actualizada PSM (Mayo 2020)Rodrigo GuerraAún no hay calificaciones
- Enrique Giordano - El Mapa de Amsterdam (Versión Completa)Documento80 páginasEnrique Giordano - El Mapa de Amsterdam (Versión Completa)Ernesto LecuonaAún no hay calificaciones
- Capítulo 2-Tesina Hidrocarburos-NahomiDocumento13 páginasCapítulo 2-Tesina Hidrocarburos-NahomiCristhian MatAún no hay calificaciones
- APS04 Contenidos 2021Documento55 páginasAPS04 Contenidos 2021Mónica Artigas TorresAún no hay calificaciones
- Financiamiento TraducidoDocumento99 páginasFinanciamiento TraducidoJorgeAún no hay calificaciones
- Velas Chantilly (Carta)Documento10 páginasVelas Chantilly (Carta)mariam msAún no hay calificaciones