También podría gustarte
- Metodología básica de instrumentación industrial y electrónicaDe EverandMetodología básica de instrumentación industrial y electrónicaCalificación: 4 de 5 estrellas4/5 (12)
- UF1670 - Reparación de equipos mecánicos y eléctricos de plantas de tratamiento de agua y plantas depuradorasDe EverandUF1670 - Reparación de equipos mecánicos y eléctricos de plantas de tratamiento de agua y plantas depuradorasCalificación: 5 de 5 estrellas5/5 (1)
- Mantenimiento de redes eléctricas aéreas de baja tensión. ELEE0109De EverandMantenimiento de redes eléctricas aéreas de baja tensión. ELEE0109Aún no hay calificaciones
- Sensores y ActuadoresDocumento16 páginasSensores y ActuadoresJoseAún no hay calificaciones
- Robot FanucDocumento139 páginasRobot Fanucjarrisone100% (5)
- Sensores y ActuadoresDocumento35 páginasSensores y ActuadoresDanny Diaz MoralesAún no hay calificaciones
- Acondicionamiento de SeñalesDocumento47 páginasAcondicionamiento de SeñalesLuiis EstradaAún no hay calificaciones
- Recepción y distribución de señales de radiodifusión. ELES0108De EverandRecepción y distribución de señales de radiodifusión. ELES0108Aún no hay calificaciones
- Libro Codesys PDFDocumento303 páginasLibro Codesys PDFCristian DumitracheAún no hay calificaciones
- SensoresDocumento168 páginasSensoresFrancisco RuizAún no hay calificaciones
- Cadena de MedidaDocumento20 páginasCadena de MedidaFabian Andres Maldonado PinosAún no hay calificaciones
- Transductores y SensoresDocumento9 páginasTransductores y SensoresAna Raquel FuenmayorAún no hay calificaciones
- Sensores y TransductoresDocumento34 páginasSensores y Transductoresyudopplyr91% (23)
- Laboratorio 03 Inductivo-CapacitivoDocumento18 páginasLaboratorio 03 Inductivo-CapacitivoMarco ChevarriaAún no hay calificaciones
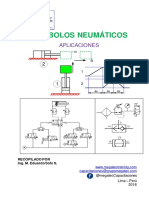
- Simbolos NeumaticosDocumento46 páginasSimbolos NeumaticosWaldir Jhon Gonzalez67% (3)
- Documento Maestro Accionamientos Oct 12Documento189 páginasDocumento Maestro Accionamientos Oct 12Sergio Andres Gomez GarzonAún no hay calificaciones
- Siemens Full BEROSDocumento18 páginasSiemens Full BEROSMauricio RubioAún no hay calificaciones
- Sensores Parte 1Documento26 páginasSensores Parte 1Luis Armando Reyes CardosoAún no hay calificaciones
- Tarea #1 Las Variables Fisicas Que Intervienen en Un Sisitema MecatronicoDocumento5 páginasTarea #1 Las Variables Fisicas Que Intervienen en Un Sisitema Mecatronicodavid100% (1)
- Laboratorio de Sensores Practica 2Documento10 páginasLaboratorio de Sensores Practica 2Jesus Alberto Ramos OrtizAún no hay calificaciones
- Tema I Generalidades Del Sistema de MedidaDocumento20 páginasTema I Generalidades Del Sistema de MedidaGerardo Antonio TrejoAún no hay calificaciones
- Investigacion SENSORESDocumento10 páginasInvestigacion SENSORESeljoy1986Aún no hay calificaciones
- Sensores y TransductoresDocumento8 páginasSensores y Transductoresfrancox778Aún no hay calificaciones
- Sensores y TransductoresDocumento3 páginasSensores y TransductoresJesús González CarvajalAún no hay calificaciones
- Trabajo de SMRDocumento13 páginasTrabajo de SMRDennis David Terán PérezAún no hay calificaciones
- Sensores y TransductoresDocumento7 páginasSensores y TransductoresEthel CruZAún no hay calificaciones
- Clasificacion de Los Sensores PDFDocumento45 páginasClasificacion de Los Sensores PDFMartin100% (3)
- Sensores CapacitivosDocumento23 páginasSensores CapacitivosJosé Carhuapoma La SernaAún no hay calificaciones
- Transductores PDFDocumento8 páginasTransductores PDFMando SerratoAún no hay calificaciones
- Transductores ElectricosDocumento18 páginasTransductores ElectricosFrancisco J CastilloAún no hay calificaciones
- Unidad 1Documento22 páginasUnidad 1fridadb12Aún no hay calificaciones
- Resumen CuadernoDocumento39 páginasResumen CuadernoLuis IzaAún no hay calificaciones
- Clase 25 - TransductoresDocumento20 páginasClase 25 - Transductoresjavier lipaAún no hay calificaciones
- Metrologia Industrial IngDocumento21 páginasMetrologia Industrial IngTomás CamposAún no hay calificaciones
- Instrumentos de MediciónDocumento14 páginasInstrumentos de Mediciónfrida sofia castillo ledezmaAún no hay calificaciones
- Sensores Cap 1y2Documento43 páginasSensores Cap 1y2Miguel DuránAún no hay calificaciones
- Cadena de MedidaDocumento15 páginasCadena de MedidaFabian Andres Maldonado PinosAún no hay calificaciones
- Tema 69Documento23 páginasTema 69jpolo3100% (3)
- Colaborativo1 - Fase 2 - Grupo - 203038Documento36 páginasColaborativo1 - Fase 2 - Grupo - 203038llambran100% (1)
- Informe 3 Sensores - Mediciones Electrónicas - Mestas Ramos - FIEE UNMSMDocumento7 páginasInforme 3 Sensores - Mediciones Electrónicas - Mestas Ramos - FIEE UNMSMDanielAún no hay calificaciones
- Lectura TécnicaDocumento18 páginasLectura TécnicaChente01 ATAún no hay calificaciones
- Acondicionamiento de SeñalesDocumento18 páginasAcondicionamiento de SeñalesORLANDO RODRIGUEZAún no hay calificaciones
- Sensores y TransductoresDocumento32 páginasSensores y TransductoresBRAYAN ALEXIS FRE BARRERAAún no hay calificaciones
- Transductores Quimico ElectricoDocumento14 páginasTransductores Quimico ElectricoRuth Cujilan Arias0% (3)
- TransductoresDocumento60 páginasTransductoresJose AAún no hay calificaciones
- INFORME IEEE - Mediciones de MedidasDocumento5 páginasINFORME IEEE - Mediciones de MedidasAndres240% (1)
- Sensores de VelocidadDocumento54 páginasSensores de VelocidadJulio Bit IxcameyAún no hay calificaciones
- Medición y Prueba de Dispositivos y Elementos PDFDocumento2 páginasMedición y Prueba de Dispositivos y Elementos PDFJulio César Sarabia Hernández100% (1)
- 4 Fascículo 4 de AutomatismoDocumento28 páginas4 Fascículo 4 de AutomatismoJunnior O. PérezAún no hay calificaciones
- CARACTERÍSTICAS GENERALES DE LOS SENSORES (Clase 1)Documento3 páginasCARACTERÍSTICAS GENERALES DE LOS SENSORES (Clase 1)chingolo1Aún no hay calificaciones
- 04-1 Determinacion de Parametros Mecanicos en MaquinasDocumento35 páginas04-1 Determinacion de Parametros Mecanicos en Maquinasalex roAún no hay calificaciones
- Transductores Unac Labo 2Documento6 páginasTransductores Unac Labo 2Jesus Rosas MontalvoAún no hay calificaciones
- Los Elementos de Entrada y Salida Utilizados en Un PLCDocumento8 páginasLos Elementos de Entrada y Salida Utilizados en Un PLCJosé ValenzuelaAún no hay calificaciones
- Practica 8 Sensores y ActDocumento13 páginasPractica 8 Sensores y ActCésar CastañedaAún no hay calificaciones
- Gpai2016 P4 SensoresDocumento48 páginasGpai2016 P4 SensoresAnthony Jtkl PonceAún no hay calificaciones
- Funcionamiento de Sensores y TransmisoresDocumento7 páginasFuncionamiento de Sensores y TransmisoresSalvador Jafet Sandoval Chimal50% (2)
- Semana 3, Clase 01 Clp0 (Sensores)Documento38 páginasSemana 3, Clase 01 Clp0 (Sensores)marxAún no hay calificaciones
- Transductores y Acondicionadores de SeñalDocumento26 páginasTransductores y Acondicionadores de SeñalJesús AlfredoAún no hay calificaciones
- Sensores y TrasductoresDocumento11 páginasSensores y TrasductoresJose AAún no hay calificaciones
- Unidad 09Documento7 páginasUnidad 09Orlando ServiánAún no hay calificaciones
- Sistemas de MedicionDocumento18 páginasSistemas de MedicionAna SantanaAún no hay calificaciones
- Sensores Analógico-DigitalesDocumento13 páginasSensores Analógico-DigitalesJuan Marcelo Cortez Gutiérrez0% (1)
- Sensores Capacitivos y ReactivosDocumento10 páginasSensores Capacitivos y ReactivosAngel VelaAún no hay calificaciones
- Mecanismos de Medición AnalógicosDocumento5 páginasMecanismos de Medición AnalógicosFull TecnologiesAún no hay calificaciones
- TEMA 3 SiDocumento60 páginasTEMA 3 SiJosé Antonio Chaves MuñozAún no hay calificaciones
- Filtro adaptativo: Mejora de la visión por computadora mediante filtrado adaptativoDe EverandFiltro adaptativo: Mejora de la visión por computadora mediante filtrado adaptativoAún no hay calificaciones
- Trabajo InstrumentacionDocumento10 páginasTrabajo Instrumentacionvictorhugo230990Aún no hay calificaciones
- Neuma U2Documento46 páginasNeuma U2Gustavo Gress GonzálezAún no hay calificaciones
- Sensores de Proximidad y UltrasonidoDocumento10 páginasSensores de Proximidad y UltrasonidoDuvanGranadosIbarraAún no hay calificaciones
- Sensores InductivosDocumento10 páginasSensores Inductivosing.cdpadillaAún no hay calificaciones
- Por Todos Estos Motivos, Considero Que (Indicar Persona de Referencia) Puede Ser Un Muy Buen Candidato para Ocupar Cualquier Puesto de Trabajo Relacionado Con Sus Materias de Estudio.Documento21 páginasPor Todos Estos Motivos, Considero Que (Indicar Persona de Referencia) Puede Ser Un Muy Buen Candidato para Ocupar Cualquier Puesto de Trabajo Relacionado Con Sus Materias de Estudio.Abel Franco CcapaAún no hay calificaciones
- 35-Sensores de Proximidad y DesplazaminetosDocumento110 páginas35-Sensores de Proximidad y DesplazaminetosERIKSON EGUSQUIZAAún no hay calificaciones
- Neumática PDocumento17 páginasNeumática PRonny Alvarez CcatamayoAún no hay calificaciones
- Sistemas Programables UNIDAD 1 y 2Documento25 páginasSistemas Programables UNIDAD 1 y 2Angel Gonzalez50% (2)
- Controladores Logicos FESTO Ejercicio 17 PDFDocumento10 páginasControladores Logicos FESTO Ejercicio 17 PDFCarlos CuevasAún no hay calificaciones
- 5.AUTFA ElectricidadDocumento107 páginas5.AUTFA ElectricidadIrene ChapadoAún no hay calificaciones
- Elementos de ControlDocumento21 páginasElementos de ControlSamuel Mtz0% (1)
- Laboratorio 03 Inductivo-CapacitivoDocumento15 páginasLaboratorio 03 Inductivo-CapacitivoEddie Conza RojasAún no hay calificaciones
- Resumen AutoDocumento3 páginasResumen AutoGeovanna Rodriguez LindaoAún no hay calificaciones
- Sensores Inductivos en Serie PDFDocumento9 páginasSensores Inductivos en Serie PDFKarla roblesAún no hay calificaciones
- Que Es Un Sensor de ProximidadDocumento11 páginasQue Es Un Sensor de ProximidadElementos IndustrialesAún no hay calificaciones
- TEMA 3 SiDocumento60 páginasTEMA 3 SiJosé Antonio Chaves MuñozAún no hay calificaciones
- 6296 20100129121656Documento142 páginas6296 20100129121656Rolando Pimentel JaramilloAún no hay calificaciones
- Historia de Los SensoresDocumento11 páginasHistoria de Los Sensoressegast60% (5)
- Sensores LabVoltDocumento18 páginasSensores LabVoltJuan Carlos Rafael GonzálezAún no hay calificaciones
- Informe Final Sensor de ProximidadDocumento16 páginasInforme Final Sensor de ProximidadMarcos Muñoz CardonaAún no hay calificaciones
- Electroneumatica: Tipo de SensoresDocumento4 páginasElectroneumatica: Tipo de SensoresBruce WayneAún no hay calificaciones
- Sesión 4 Sensores - MergedDocumento128 páginasSesión 4 Sensores - MergedLUZ ANGELAAún no hay calificaciones
- Diagrama VWDocumento2 páginasDiagrama VWNeftali OlivaresAún no hay calificaciones
- Sensor de ProximidadDocumento6 páginasSensor de Proximidaddelgadito99 delgatoAún no hay calificaciones