También podría gustarte
- Morfologia de Robots PDFDocumento51 páginasMorfologia de Robots PDFDiego LykaiosAún no hay calificaciones
- Tema 01b Morfología Del Robot ManipuladorDocumento21 páginasTema 01b Morfología Del Robot Manipuladordalton yañezAún no hay calificaciones
- Arquitectura Robots Sensores y ActuadoresDocumento27 páginasArquitectura Robots Sensores y Actuadoreswigido100% (1)
- 2 RoboticaIndustrial MorfologiaDocumento54 páginas2 RoboticaIndustrial MorfologiaJorgeAún no hay calificaciones
- FS04 Componentes RobotDocumento100 páginasFS04 Componentes RobotEnzo Gallo Ruiz FlorianAún no hay calificaciones
- Robots CilíndricosDocumento16 páginasRobots CilíndricosWilliam Pauzhi IdrovoAún no hay calificaciones
- Introducción Cinemática de RobotsDocumento25 páginasIntroducción Cinemática de RobotsgabrielAún no hay calificaciones
- Robotica 2Documento70 páginasRobotica 2Luciano Enrique Gonzalez GonzalezAún no hay calificaciones
- Robotica Industrial 2 2014Documento49 páginasRobotica Industrial 2 2014Braulio ValdesAún no hay calificaciones
- Morfología Del RobotDocumento52 páginasMorfología Del RobotMarco Antonio0% (1)
- 2 Morfologia de Robots PDFDocumento32 páginas2 Morfologia de Robots PDFdamntbaAún no hay calificaciones
- Unidad 1Documento31 páginasUnidad 1Juan ManuelAún no hay calificaciones
- Practica #1: Escuela Superior Politecnica Del Litoral Facultad de Ingenieria en Electricidad Y ComputacionDocumento19 páginasPractica #1: Escuela Superior Politecnica Del Litoral Facultad de Ingenieria en Electricidad Y ComputacionAlex Guamán EspinozaAún no hay calificaciones
- Robótica Unidad1Documento60 páginasRobótica Unidad1Roberto Magaña GarciaAún no hay calificaciones
- Presentacion RoboticaDocumento27 páginasPresentacion RoboticaJezzi GLAún no hay calificaciones
- Apuntes de Robótica UD1 Punto 5Documento13 páginasApuntes de Robótica UD1 Punto 5Francisco Alfonso Hernandez BravoAún no hay calificaciones
- Morfología Del RobotDocumento61 páginasMorfología Del RobotJUAN ANTONIO MARQUEZ CORNEJOAún no hay calificaciones
- Jornada Robótica IndustrialDocumento82 páginasJornada Robótica IndustrialJavier MartínezAún no hay calificaciones
- Arquitectura de Robots, Sensores y ActuadoresDocumento27 páginasArquitectura de Robots, Sensores y ActuadoresHector RosasAún no hay calificaciones
- Sensores ActuadoresDocumento27 páginasSensores ActuadoresYsabel AliagaAún no hay calificaciones
- Introducción A La RobóticaDocumento32 páginasIntroducción A La Robóticamrtaz007Aún no hay calificaciones
- 2 Morfologia y Cinemática Del RobotDocumento52 páginas2 Morfologia y Cinemática Del RobotPedro Angel Villada SanchezAún no hay calificaciones
- Actuadores y SensoresDocumento22 páginasActuadores y SensoresJohn Edward BenjumeaAún no hay calificaciones
- Unidad 1Documento31 páginasUnidad 1José Manuel MoaAún no hay calificaciones
- Estructura Mecánica Del RobotDocumento67 páginasEstructura Mecánica Del RobotjoshuaAún no hay calificaciones
- Tema 1.3 y 1.4 Actuadores, Sensores y Efectores FinalesDocumento22 páginasTema 1.3 y 1.4 Actuadores, Sensores y Efectores FinalesYami CortezAún no hay calificaciones
- Morfologia Del Robot PDFDocumento10 páginasMorfologia Del Robot PDFphillamxAún no hay calificaciones
- SevomotoresDocumento31 páginasSevomotoresUlises QuintanillaAún no hay calificaciones
- Robot CilindricoDocumento9 páginasRobot CilindricoPame Espejo0% (2)
- 11 Componentes Robot IDocumento55 páginas11 Componentes Robot IPEPE PecasAún no hay calificaciones
- Clase #2a Morfología de Robot - Estructura MecánicaDocumento46 páginasClase #2a Morfología de Robot - Estructura MecánicaJuanAún no hay calificaciones
- Informe N°1 RoboticaDocumento15 páginasInforme N°1 RoboticaEduardo QuistanAún no hay calificaciones
- 3 - Clasificación y Morfología Del RobotDocumento41 páginas3 - Clasificación y Morfología Del RobotViviana Tito RodríguezAún no hay calificaciones
- Robotica IndustrialDocumento138 páginasRobotica IndustrialJeans Marco Nassi CernaAún no hay calificaciones
- Capitulo 2 Características DE LOS ROBOTSDocumento49 páginasCapitulo 2 Características DE LOS ROBOTSDanny LopezAún no hay calificaciones
- Presentación Robot Móvil de Tracción DiferencialDocumento25 páginasPresentación Robot Móvil de Tracción DiferencialLeonardo AmayaAún no hay calificaciones
- Resumen Libro Fundamentos de RoboticaDocumento41 páginasResumen Libro Fundamentos de RoboticaaaAún no hay calificaciones
- Morfologia Del Robot Actuadores y SensoresDocumento25 páginasMorfologia Del Robot Actuadores y Sensoreslore002Aún no hay calificaciones
- Robotica IndustrialDocumento41 páginasRobotica IndustrialjozuryAún no hay calificaciones
- Morfologia Del Robot ManipuladorDocumento283 páginasMorfologia Del Robot ManipuladorJose Alfredo Rivera ChavezAún no hay calificaciones
- Robot CilindricoDocumento10 páginasRobot Cilindricohector vela gutierrezAún no hay calificaciones
- UD9 Soldadura de RobotDocumento39 páginasUD9 Soldadura de RobotCristian Viqueira carnotaAún no hay calificaciones
- Práctica 1. Reconocimiento de La Las Partes y Características de La Familia de Robot Fanuc S420i PDFDocumento5 páginasPráctica 1. Reconocimiento de La Las Partes y Características de La Familia de Robot Fanuc S420i PDFAntonio SantoyoAún no hay calificaciones
- Especificaciones Tecnicas Scorbot ER-9 (Ok)Documento4 páginasEspecificaciones Tecnicas Scorbot ER-9 (Ok)Yilmer MachaccaAún no hay calificaciones
- Introducción A La RoboticaDocumento31 páginasIntroducción A La RoboticahaguilarAún no hay calificaciones
- ROBÓTICADocumento46 páginasROBÓTICAwalter puma floresAún no hay calificaciones
- Transmision Del MovimientoDocumento12 páginasTransmision Del MovimientoIvette RamírezAún no hay calificaciones
- T1 Robotica Industrial - ServomotoresDocumento83 páginasT1 Robotica Industrial - Servomotoressilverio17antezanaAún no hay calificaciones
- Clasificacion y Estructura MecanicaDocumento85 páginasClasificacion y Estructura MecanicaJoel JalezAún no hay calificaciones
- Introduccion RoboticaDocumento106 páginasIntroduccion RoboticaArturo Tapia100% (1)
- Configuraciones de Un Robot Industrial3 PDFDocumento30 páginasConfiguraciones de Un Robot Industrial3 PDFAgustin Basilio SalinasAún no hay calificaciones
- Informe2 Presentacion DiseñoDocumento9 páginasInforme2 Presentacion DiseñoEIEEAún no hay calificaciones
- KukaDocumento19 páginasKukaYenny OrtegaAún no hay calificaciones
- Primera SustentacionDocumento26 páginasPrimera SustentacionLuis Angel Bonza PeñaAún no hay calificaciones
- ARI Tema 2 Morfología Del Robot 19-20Documento58 páginasARI Tema 2 Morfología Del Robot 19-20Yassin BehdaouiAún no hay calificaciones
- Curso de Paneles SolaresDocumento27 páginasCurso de Paneles Solareshalfonso91100% (3)
- Produccion de HidrogenoDocumento69 páginasProduccion de HidrogenoMarvil Raul Cieza CastilloAún no hay calificaciones
- Domus DemainDocumento7 páginasDomus DemainDario CalaAún no hay calificaciones
- Catalogo 2015 Tuberia AceromexDocumento9 páginasCatalogo 2015 Tuberia AceromexRAFAEL HERRERAAún no hay calificaciones
- Autodepuracion en Corrientes de Agua PDFDocumento8 páginasAutodepuracion en Corrientes de Agua PDFRicardo Miguel Butron QAún no hay calificaciones
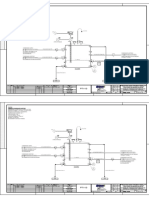
- Pti-Id: R2B-P6-406-02-A-DTI-00001Documento2 páginasPti-Id: R2B-P6-406-02-A-DTI-00001raul ortiz hernandez100% (1)
- Viga DintelDocumento3 páginasViga DintelHarold CamposAún no hay calificaciones
- Robot Brochure AbrilDocumento10 páginasRobot Brochure AbrilDanny BrionesAún no hay calificaciones
- Análisis Del Puesto de Trabajo Ciclos PropedeuticosDocumento6 páginasAnálisis Del Puesto de Trabajo Ciclos PropedeuticosNeyerStevenAún no hay calificaciones
- Libros GM 18 19 PDFDocumento6 páginasLibros GM 18 19 PDFJacobo MorenoAún no hay calificaciones
- Medicion de La Temperatura y La HumedadDocumento13 páginasMedicion de La Temperatura y La HumedadsaulAún no hay calificaciones
- Informe2 1Documento26 páginasInforme2 1ivanAún no hay calificaciones
- La DensidadDocumento5 páginasLa DensidadRicardo VelázquezAún no hay calificaciones
- Informe Segmento Metalmecánico Pequeño Abril - Mayo19. Alvaro Alexi Ocampo SilvaDocumento11 páginasInforme Segmento Metalmecánico Pequeño Abril - Mayo19. Alvaro Alexi Ocampo SilvaAlvaro ocampo silvaAún no hay calificaciones
- Practica ExcavacionesDocumento14 páginasPractica ExcavacionesDaniela ArangoAún no hay calificaciones
- Fichas Tecnicas SenaDocumento104 páginasFichas Tecnicas SenaEliseo_Angel_R_8098Aún no hay calificaciones
- VENTEODocumento2 páginasVENTEOAndrésRodríguezAún no hay calificaciones
- Acoplamiento MagneticoDocumento7 páginasAcoplamiento MagneticoJesus Rosas MontalvoAún no hay calificaciones
- 11productos Automotriz FormulasDocumento12 páginas11productos Automotriz FormulasDeejay JoseAún no hay calificaciones
- Valorizacion MODELODocumento138 páginasValorizacion MODELOCristian RojasAún no hay calificaciones
- CAPITULO 5 - Subredes PDFDocumento4 páginasCAPITULO 5 - Subredes PDFrichy_eg185834Aún no hay calificaciones
- La Planificación Estratégica en Entidades DeportivasDocumento10 páginasLa Planificación Estratégica en Entidades DeportivasyolandaAún no hay calificaciones
- La Construcción de EdificiosDocumento9 páginasLa Construcción de EdificiosDRM Investments para LatinaméricaAún no hay calificaciones
- Informe Hidrologia1Documento5 páginasInforme Hidrologia1Alex Ricardo Cano CarbajalAún no hay calificaciones
- Tornillo Sin FinDocumento15 páginasTornillo Sin FinBilly Jordan Carretero MirandaAún no hay calificaciones
- FichaTecnica Xanox MarineDocumento1 páginaFichaTecnica Xanox Marinejavier palazuelosAún no hay calificaciones
- Estudio Geotecnico Trabajo de Campo Perfil EstratigraficoDocumento49 páginasEstudio Geotecnico Trabajo de Campo Perfil EstratigraficoJhonatan Vega100% (1)
- Sistemas de Transmisión de Polea y Correa - Punto 8 - Santibañez JoaquinDocumento17 páginasSistemas de Transmisión de Polea y Correa - Punto 8 - Santibañez JoaquinBrian MurugaAún no hay calificaciones
- Fabrica AbstractaDocumento4 páginasFabrica AbstractaRocio Vazquez FurelosAún no hay calificaciones
- Trabajo 3 Instrumentaci NDocumento11 páginasTrabajo 3 Instrumentaci Njejvargasro0% (1)