También podría gustarte
- Influencia Del Uso de La Microsilice en La Resistencia A La Compresion y Durabilidad Del Concreto HidraulicoDocumento14 páginasInfluencia Del Uso de La Microsilice en La Resistencia A La Compresion y Durabilidad Del Concreto HidraulicojosepalacioshAún no hay calificaciones
- E65 Cambio Automático GA6HP26Z y Transmisión de Fuerza MTDocumento55 páginasE65 Cambio Automático GA6HP26Z y Transmisión de Fuerza MTJuanCarlosCastillo100% (1)
- Poyecto de Predimensionamiento-Analisis EstructuralDocumento26 páginasPoyecto de Predimensionamiento-Analisis EstructuralJhonatan Jair Umbo FloresAún no hay calificaciones
- Solution of Mathisson-Papapetrou-Dixon equations: for spinning test particles in a Kerr metricDe EverandSolution of Mathisson-Papapetrou-Dixon equations: for spinning test particles in a Kerr metricAún no hay calificaciones
- Primera Practica de EstaticaDocumento14 páginasPrimera Practica de EstaticaWilcer Cusquisiban De La CruzAún no hay calificaciones
- Examen de MontacargasDocumento2 páginasExamen de MontacargasEver QhAún no hay calificaciones
- Ensayos de Humedad y Limites de ConsistenciaDocumento17 páginasEnsayos de Humedad y Limites de ConsistenciaKatherin AzAún no hay calificaciones
- Universidad Nacional de Ingeniería Facultad de Ingeniería CivilDocumento3 páginasUniversidad Nacional de Ingeniería Facultad de Ingeniería CivilAnonymous 5PZhtp43Aún no hay calificaciones
- Ensayo Absorcion de Agua de Una RocaDocumento4 páginasEnsayo Absorcion de Agua de Una RocaMayra Alejandra Allauca MoralesAún no hay calificaciones
- Resumen EjecutivoDocumento29 páginasResumen EjecutivoBrenda Yomira Mija CarrionAún no hay calificaciones
- Informe #Tecnologia Del ConcretoDocumento33 páginasInforme #Tecnologia Del ConcretoJulissa Evelyn Cruz HuaynatesAún no hay calificaciones
- Silabo Ing Caminos Ii 2022-0Documento4 páginasSilabo Ing Caminos Ii 2022-0José MiguelAún no hay calificaciones
- POLIGONALDocumento25 páginasPOLIGONALEmerson Terrones AguilarAún no hay calificaciones
- ENSAYO DE CBR TrabajoDocumento25 páginasENSAYO DE CBR Trabajoanon_1504716520% (1)
- 2022-2 PL1 Materiales PétreosDocumento17 páginas2022-2 PL1 Materiales PétreosRománRomaRomaRoncerosAún no hay calificaciones
- Mortero EcologicosDocumento10 páginasMortero EcologicosJorgeAún no hay calificaciones
- SÍLABO Resistencia de Materiales 1 2016 IIDocumento6 páginasSÍLABO Resistencia de Materiales 1 2016 IIMery Cristina Cahuana CáceresAún no hay calificaciones
- 4° Prac-Cal-Const de Carret-2020-Marzo-CDocumento2 páginas4° Prac-Cal-Const de Carret-2020-Marzo-CNicolas LimaAún no hay calificaciones
- LECTURA 3 Caracteristicas Generales de La Sismicidad en El Peru PDFDocumento14 páginasLECTURA 3 Caracteristicas Generales de La Sismicidad en El Peru PDFYerson Lima ZuñigaAún no hay calificaciones
- Seccion 201 204Documento11 páginasSeccion 201 204Karla HrndzAún no hay calificaciones
- Silabo Mecánica de Fluidos - UpnDocumento3 páginasSilabo Mecánica de Fluidos - UpnIsaac MedinaAún no hay calificaciones
- Informe de Suelo y Asfalto 3Documento45 páginasInforme de Suelo y Asfalto 3DanielAún no hay calificaciones
- Piedra Chancada M N°01 - Granulometría (1150)Documento5 páginasPiedra Chancada M N°01 - Granulometría (1150)Brandon Hinostroza BaldeonAún no hay calificaciones
- SílaboDocumento3 páginasSílaboDayanna MendozaAún no hay calificaciones
- Trabajo de Proctor y CBRDocumento44 páginasTrabajo de Proctor y CBRFrank Bonzano BonzanoAún no hay calificaciones
- Resistencia de MaterialesDocumento13 páginasResistencia de Materialesclaudia5catherine5hoAún no hay calificaciones
- Informe #02 Taller #12Documento15 páginasInforme #02 Taller #12Marce Montalvan ZuñigaAún no hay calificaciones
- Uni 2019+ii+tv+114+i+e.parcialDocumento1 páginaUni 2019+ii+tv+114+i+e.parcialDiego GAAún no hay calificaciones
- Ensayo de CompresiónDocumento8 páginasEnsayo de CompresiónAlvaro Pazmiño RomanAún no hay calificaciones
- Informe - Cemento Puzolanico IP - Pisco - 2021Documento7 páginasInforme - Cemento Puzolanico IP - Pisco - 2021Melsar Eduardo Espejo YupanquiAún no hay calificaciones
- Informe de Trafico OkDocumento29 páginasInforme de Trafico OkEngels Miraval DazaAún no hay calificaciones
- Agregado Pasante Malla N° 200 2Documento11 páginasAgregado Pasante Malla N° 200 2Alon PAún no hay calificaciones
- Ensayo de Equivalente de Arena de Suelos y Agregados FinosDocumento5 páginasEnsayo de Equivalente de Arena de Suelos y Agregados FinosYinna RuizAún no hay calificaciones
- Uni .. Topografia. Curvas de NivelDocumento21 páginasUni .. Topografia. Curvas de NivelerickferbAún no hay calificaciones
- Trabajo Final Suelos 2 SustentadoDocumento23 páginasTrabajo Final Suelos 2 SustentadoGustavo Carlos Gomez C.Aún no hay calificaciones
- Cap #2-Distribución de Velocidades y Perfiles de VelocidadDocumento18 páginasCap #2-Distribución de Velocidades y Perfiles de VelocidadLuis Carrillo JacayAún no hay calificaciones
- Ley de Conservacion de La MateriaDocumento3 páginasLey de Conservacion de La MateriaJoe BotelloAún no hay calificaciones
- Examen Estatica t1Documento10 páginasExamen Estatica t1Adrián LozanoAún no hay calificaciones
- Informe T3 Suelos 1Documento24 páginasInforme T3 Suelos 1Walter Henrnadez RomanAún no hay calificaciones
- EF-Metodologia Universitaria - Sanchez Montalban Denis AlexDocumento7 páginasEF-Metodologia Universitaria - Sanchez Montalban Denis AlexDenisAún no hay calificaciones
- Tiempos de Fraguado Del Cemento Tipo IDocumento17 páginasTiempos de Fraguado Del Cemento Tipo IYosepZavalaLlanosAún no hay calificaciones
- Informe Agregados: Granulometria y Caras FracturadasDocumento23 páginasInforme Agregados: Granulometria y Caras FracturadasDanae CamposAún no hay calificaciones
- Ensayo Contenido de HumedadDocumento13 páginasEnsayo Contenido de HumedadFiorella MejiaAún no hay calificaciones
- Diseño de Mezclas Metodo Din 1045Documento32 páginasDiseño de Mezclas Metodo Din 1045Carlos Fernando HoyosAún no hay calificaciones
- Trabajo Escalonado - Geología Aplicada A PozosDocumento15 páginasTrabajo Escalonado - Geología Aplicada A Pozosjean carlosAún no hay calificaciones
- KatiaDocumento85 páginasKatiaKatia Huaraya MamaniAún no hay calificaciones
- Trigonometria Plana y EsfericaDocumento28 páginasTrigonometria Plana y EsfericaPaola De la CruzAún no hay calificaciones
- INFORME #5 Limite Liquido y PlasticoDocumento11 páginasINFORME #5 Limite Liquido y Plasticoyelitza mezaAún no hay calificaciones
- AC1 Mecánica de Suelos CX54 2022 1 SolucionarioDocumento8 páginasAC1 Mecánica de Suelos CX54 2022 1 SolucionarioGaby VKAún no hay calificaciones
- Monografia - Mecanica de FluidosDocumento21 páginasMonografia - Mecanica de FluidosElmerOsorioGuillen100% (1)
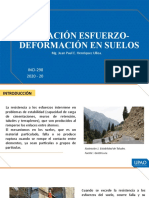
- M.s.ii. Sesión 01 - Relación Esfuerzo-Deformación Del SueloDocumento14 páginasM.s.ii. Sesión 01 - Relación Esfuerzo-Deformación Del SueloCarlos Rodriguez Gonzales0% (1)
- EVALUACION T1 Estructuras y CargasDocumento1 páginaEVALUACION T1 Estructuras y CargasFrank KevinAún no hay calificaciones
- Tabla para Diseño de MezclasDocumento5 páginasTabla para Diseño de MezclasoscarcoyAún no hay calificaciones
- Mecanica de Suelo T3 Avilez - JoeDocumento3 páginasMecanica de Suelo T3 Avilez - Joejoe avilezAún no hay calificaciones
- S1 GD Proyecciones Teo PDFDocumento5 páginasS1 GD Proyecciones Teo PDFjesusAún no hay calificaciones
- Descarga Vertical Por OrificiosDocumento35 páginasDescarga Vertical Por OrificiosAldair Flores CusmaAún no hay calificaciones
- Info5 GEOTECNIA 2 CAPACIDAD DE CARGA UNHEVAL FICA FERNANDEZ SIXTODocumento39 páginasInfo5 GEOTECNIA 2 CAPACIDAD DE CARGA UNHEVAL FICA FERNANDEZ SIXTOTello Jaimes RodolfoAún no hay calificaciones
- Ensayo de Compactacion - Proctor ModificadoDocumento7 páginasEnsayo de Compactacion - Proctor ModificadoRodyQuiscaOtazuAún no hay calificaciones
- Informe de CalicataDocumento10 páginasInforme de CalicataSaenz Ruth100% (1)
- Compactacion Del Suelo en Laboratorio Utilizando Una Energia EstandarDocumento9 páginasCompactacion Del Suelo en Laboratorio Utilizando Una Energia EstandarWils Adolfo Calle TorresAún no hay calificaciones
- Expediente TécnicoDocumento20 páginasExpediente TécnicoFiorela MatiasAún no hay calificaciones
- Informe Final de Dinamica Lunes 30Documento30 páginasInforme Final de Dinamica Lunes 30Wilcer Cusquisiban De La CruzAún no hay calificaciones
- Regla de MezclaDocumento2 páginasRegla de MezclaWilcer Cusquisiban De La CruzAún no hay calificaciones
- Propiedades Mecanicas de Los Materiales de Piedra NaturalDocumento22 páginasPropiedades Mecanicas de Los Materiales de Piedra NaturalWilcer Cusquisiban De La CruzAún no hay calificaciones
- Base 20Documento58 páginasBase 20Wilcer Cusquisiban De La Cruz0% (1)
- Base 20Documento66 páginasBase 20Wilcer Cusquisiban De La CruzAún no hay calificaciones
- Dinamica Listo para ImprimirDocumento28 páginasDinamica Listo para ImprimirWilcer Cusquisiban De La CruzAún no hay calificaciones
- Volumes de RevolucionDocumento5 páginasVolumes de RevolucionWilcer Cusquisiban De La CruzAún no hay calificaciones
- CURSODocumento7 páginasCURSOWilcer Cusquisiban De La CruzAún no hay calificaciones
- Solucionario Práctica Calificada ZDocumento5 páginasSolucionario Práctica Calificada ZJosue Montesdioca Cornejo0% (1)
- Primera Practica de AnalisisDocumento20 páginasPrimera Practica de AnalisisWilcer Cusquisiban De La CruzAún no hay calificaciones
- Electrostatica - 2018-II PDFDocumento29 páginasElectrostatica - 2018-II PDFWilcer Cusquisiban De La CruzAún no hay calificaciones
- Falacias en La ArgumentacionDocumento61 páginasFalacias en La ArgumentacionWilcer Cusquisiban De La CruzAún no hay calificaciones
- FISICADocumento2 páginasFISICAWilcer Cusquisiban De La CruzAún no hay calificaciones
- Informe CalicatasDocumento48 páginasInforme CalicatasWilcer Cusquisiban De La CruzAún no hay calificaciones
- La IntemperizacionDocumento4 páginasLa IntemperizacionWilcer Cusquisiban De La CruzAún no hay calificaciones
- Practica - Prueba de Hipotesis de Dos Muestras Semana 12Documento28 páginasPractica - Prueba de Hipotesis de Dos Muestras Semana 12mirka del pilar100% (1)
- Una Introducción A La Física Contemporánea-Primera ParteDocumento23 páginasUna Introducción A La Física Contemporánea-Primera PartemauricioAún no hay calificaciones
- Aditivos para ConcretoDocumento5 páginasAditivos para ConcretoJEM PAUL BRONLEY OLAYAAún no hay calificaciones
- Reglamento de Aparatos A Presion-Orden 1244 de 04-04-1979Documento2 páginasReglamento de Aparatos A Presion-Orden 1244 de 04-04-1979arreburraAún no hay calificaciones
- Matambre Cerdo A La Leche Con CebollaDocumento11 páginasMatambre Cerdo A La Leche Con CebollaKyla MartinezAún no hay calificaciones
- Cilindro Análisis Estático 1 1 PDFDocumento13 páginasCilindro Análisis Estático 1 1 PDFDev GeinAún no hay calificaciones
- Ficha y Rúbrica de Jornadas-FinalDocumento6 páginasFicha y Rúbrica de Jornadas-Finallaliz llajaruna bartoloAún no hay calificaciones
- Manejo Sanitario y Reproductivo de Los OvinosDocumento5 páginasManejo Sanitario y Reproductivo de Los OvinosMarko AntezanoAún no hay calificaciones
- PET - Colocación de Bloques de ConcretoDocumento10 páginasPET - Colocación de Bloques de ConcretoQuenitzon Meza ArevaloAún no hay calificaciones
- Planeación GeografíaDocumento2 páginasPlaneación GeografíaEstrella SantiagoAún no hay calificaciones
- Formato Inspección Pre-Operacional Herramientas PDFDocumento2 páginasFormato Inspección Pre-Operacional Herramientas PDFYILY SIMONDSAún no hay calificaciones
- Pefil NeuropsicologicoDocumento5 páginasPefil Neuropsicologicovanesa merchanAún no hay calificaciones
- Cuidado Espalda AficheDocumento1 páginaCuidado Espalda AficheSlr Oscar GualterosAún no hay calificaciones
- Cabezal ClassicBlueDocumento2 páginasCabezal ClassicBlueManuel GallegosAún no hay calificaciones
- Interseal 670 HsDocumento4 páginasInterseal 670 Hsdr_valderramaAún no hay calificaciones
- Ideas Principales - Opción 1Documento5 páginasIdeas Principales - Opción 1Mariana Luz GomezAún no hay calificaciones
- Guía de Atención A Clientes Presencial Del Camarón CansadoDocumento11 páginasGuía de Atención A Clientes Presencial Del Camarón CansadoGestión De RedesAún no hay calificaciones
- BecaDocumento2 páginasBecaBelén Huanca IslaAún no hay calificaciones
- Reforzamos Nuestros AprendizajesDocumento7 páginasReforzamos Nuestros AprendizajesBeatriz EvazAún no hay calificaciones
- Proceso de Apoyo A4-2Documento1 páginaProceso de Apoyo A4-2Santiago Vargas SierraAún no hay calificaciones
- Calculadora Transistores BJT Revision 1.1Documento15 páginasCalculadora Transistores BJT Revision 1.1danielAún no hay calificaciones
- Las Mentiras Del Índice de Masa CorporalDocumento3 páginasLas Mentiras Del Índice de Masa CorporalMarco GomezAún no hay calificaciones
- Los AntisepticosDocumento14 páginasLos AntisepticosDiana BecerraAún no hay calificaciones
- EVENTO MANOLO LISTO - WatermarkDocumento8 páginasEVENTO MANOLO LISTO - WatermarkGaby MtzAún no hay calificaciones
- Dax2017774737 PDFDocumento471 páginasDax2017774737 PDFkatiaAún no hay calificaciones
- PROYECTO CHICAMA ImprimirDocumento27 páginasPROYECTO CHICAMA ImprimirCekzito Gonz Ch100% (1)
- SulfonilureasDocumento4 páginasSulfonilureasapi-629754207Aún no hay calificaciones
- Pi415 Cap 12-13 Estrategias de ControlDocumento81 páginasPi415 Cap 12-13 Estrategias de ControlPedro MamaniAún no hay calificaciones