También podría gustarte
- Ponton Arreglo General TodoDocumento62 páginasPonton Arreglo General TodoMihuler Yordy Romero RojasAún no hay calificaciones
- Efecto Squat MejoradoDocumento5 páginasEfecto Squat MejoradoEduardo SeclenAún no hay calificaciones
- Arquitectura Naval 5Documento30 páginasArquitectura Naval 5SilviaCueva100% (2)
- 2 Las Sociedades y La Empresa NavieraDocumento4 páginas2 Las Sociedades y La Empresa NavieraAdrián Galdo YáñezAún no hay calificaciones
- Ppt-Estabilidad Dinámica Falta Parte 2 XDDocumento26 páginasPpt-Estabilidad Dinámica Falta Parte 2 XDJose Zizold100% (1)
- Puente Clase 5 Elementos de EstabilidadDocumento20 páginasPuente Clase 5 Elementos de EstabilidadAlexis Andres Calderon Arcos100% (1)
- Tiro y ArrastreDocumento4 páginasTiro y ArrastreMikhail Roy Dela CruzAún no hay calificaciones
- Buques Duros y Buques Blando1 PDFDocumento2 páginasBuques Duros y Buques Blando1 PDFYenisel Aguilar100% (1)
- Plan de Tesis Remolcador FinalDocumento18 páginasPlan de Tesis Remolcador FinalIvan Pino FigueroaAún no hay calificaciones
- Clase 4 - Esfuerzos LongitudinalesDocumento35 páginasClase 4 - Esfuerzos LongitudinalesAndres Fava100% (1)
- Procedimiento Sistema de Propulsion y GobiernoDocumento8 páginasProcedimiento Sistema de Propulsion y GobiernoCarlos Auvin Rojas LeonAún no hay calificaciones
- DGTM 010-002 RemolqueDocumento19 páginasDGTM 010-002 RemolqueCarlos Alberto Zamorano PizarroAún no hay calificaciones
- DISEÑO PRELIMINAR DE UNA EMBARCACIÓN RECOLECTORA DE LECHUGUINES v01.00Documento127 páginasDISEÑO PRELIMINAR DE UNA EMBARCACIÓN RECOLECTORA DE LECHUGUINES v01.00Sergio AnguloAún no hay calificaciones
- Convenio Relativo Al Alojamiento de La Tripulación ADocumento30 páginasConvenio Relativo Al Alojamiento de La Tripulación AOrlando J AyalaAún no hay calificaciones
- S14.s1 - MATERIAL - Maniobras de Hombre Al Agua y Resumen-Maniobra IIDocumento99 páginasS14.s1 - MATERIAL - Maniobras de Hombre Al Agua y Resumen-Maniobra IIAaron ZamudioAún no hay calificaciones
- Contrato de AjusteDocumento8 páginasContrato de Ajusteflorg19Aún no hay calificaciones
- Estabilidad DE BUQUESDocumento8 páginasEstabilidad DE BUQUESJosé LauraAún no hay calificaciones
- Cuadernillo de Estabilidad Barcaza Kaki Kaki VDocumento27 páginasCuadernillo de Estabilidad Barcaza Kaki Kaki VAdin Eliecer100% (1)
- Tanker OperationsDocumento166 páginasTanker OperationsCarlos NaranjoAún no hay calificaciones
- Cuadernillo (2) - Ruiz - VillaltaDocumento12 páginasCuadernillo (2) - Ruiz - VillaltaAngel RuizAún no hay calificaciones
- Cálculo de Francobordo - 22Documento7 páginasCálculo de Francobordo - 22Adrian TeranAún no hay calificaciones
- 06 Regla de InterésDocumento8 páginas06 Regla de InterésIke_CollpaAún no hay calificaciones
- Est Estab Del Buque 2Documento4 páginasEst Estab Del Buque 2Adrian TeranAún no hay calificaciones
- EstabilidadDocumento2 páginasEstabilidadtonyAún no hay calificaciones
- Experimento de InclinaciónDocumento12 páginasExperimento de Inclinaciónduvan vasquezAún no hay calificaciones
- 3 AmarrasDocumento9 páginas3 AmarrasAndi SanchezAún no hay calificaciones
- Trabajo de Olas, Teoria Del Buque IIDocumento18 páginasTrabajo de Olas, Teoria Del Buque IIAlejandro Mujica100% (1)
- Procedimiento Prueba Bollard PullDocumento5 páginasProcedimiento Prueba Bollard PullManuela CalleAún no hay calificaciones
- Sistema PropulsionDocumento30 páginasSistema PropulsionVictor Jesus RiosAún no hay calificaciones
- Capítulo 10 Las Reglas de Simpson paraDocumento6 páginasCapítulo 10 Las Reglas de Simpson paraSayaOtonashiAún no hay calificaciones
- Estimaciones Preliminares de Los Nuevos BuquesDocumento14 páginasEstimaciones Preliminares de Los Nuevos BuquesEnrique J. Carrillo GómezAún no hay calificaciones
- Eval. I de EstabilidDocumento3 páginasEval. I de EstabilidMarcelaAún no hay calificaciones
- Guia Alumno EXPERIMENTO DE INCLINACIÓN EN EL BANCO DE ESTABILIDADDocumento44 páginasGuia Alumno EXPERIMENTO DE INCLINACIÓN EN EL BANCO DE ESTABILIDADzandryta2000Aún no hay calificaciones
- Cuadernillo de EstabilidadDocumento13 páginasCuadernillo de EstabilidadElias Fausto Bustamante RodriguezAún no hay calificaciones
- Doig MarineDocumento23 páginasDoig MarineJuan Manuel Vallejos QuispeAún no hay calificaciones
- Criterios de Estabilidad para BuquesDocumento2 páginasCriterios de Estabilidad para BuquesmlrseamanAún no hay calificaciones
- Velocidad, Flotabilidad, Estabilidad, Maniobrabilidad Barco Amereida PDFDocumento19 páginasVelocidad, Flotabilidad, Estabilidad, Maniobrabilidad Barco Amereida PDFJuniorJavier Olivo FarreraAún no hay calificaciones
- Capítulo VIII Primer ExamenDocumento6 páginasCapítulo VIII Primer ExamenFernandoAún no hay calificaciones
- Semana 2 - EstabilidadDocumento17 páginasSemana 2 - Estabilidadmiles100% (1)
- Planificación de Su ViajeDocumento2 páginasPlanificación de Su ViajeCristian Testa100% (1)
- Examen Estabilidad - Rafael Mora ValenzuelaDocumento9 páginasExamen Estabilidad - Rafael Mora ValenzuelaAndres CaribaldiAún no hay calificaciones
- Advertencias e Informacion Sobre Uso y Mantenimieto de PastecasDocumento8 páginasAdvertencias e Informacion Sobre Uso y Mantenimieto de PastecasLuis Alberto Basilio VerasteguiAún no hay calificaciones
- Teoría de La VaradaDocumento8 páginasTeoría de La VaradaLuis Alberto González SalgadoAún no hay calificaciones
- Modelo de Manual de Carga y AdDocumento18 páginasModelo de Manual de Carga y AdGustavo FerreiraAún no hay calificaciones
- Marcas de Seguridad para La Flotabilidad Del Buque en Agua Marinas y Dulces (Aguas Continentales)Documento19 páginasMarcas de Seguridad para La Flotabilidad Del Buque en Agua Marinas y Dulces (Aguas Continentales)Patricia Tizon YoveraAún no hay calificaciones
- Plano de Formas, Curvas Hidrosticas...Documento55 páginasPlano de Formas, Curvas Hidrosticas...JUNIOR OLIVOAún no hay calificaciones
- Asiento y DesplazamientoDocumento4 páginasAsiento y Desplazamientomiguelx91Aún no hay calificaciones
- MV477 Silabo 2015 2Documento4 páginasMV477 Silabo 2015 2Clinton Estacio GomezAún no hay calificaciones
- b34208860 PDFDocumento255 páginasb34208860 PDFjesusAún no hay calificaciones
- Dimensionamiento Del CatamaranDocumento15 páginasDimensionamiento Del CatamaranjosegAún no hay calificaciones
- Equipo de Gobierno Actividad 2Documento10 páginasEquipo de Gobierno Actividad 2Mauricio RiandiAún no hay calificaciones
- Examen Parcial Navegacion IIIDocumento3 páginasExamen Parcial Navegacion IIIORLANDO100% (1)
- La Hélice de Un BuqueDocumento3 páginasLa Hélice de Un BuqueMoises RomeroAún no hay calificaciones
- Manual Curso Omi 1 19 Técnicas de Supervivencia Personal PDFDocumento68 páginasManual Curso Omi 1 19 Técnicas de Supervivencia Personal PDFRodolfoGodoyAún no hay calificaciones
- Gruas y Plumas, AnchorDocumento28 páginasGruas y Plumas, AnchorAleex RGAún no hay calificaciones
- Sistema de Maniobra Timones Ii Año de Maquinas 30.09.2016Documento59 páginasSistema de Maniobra Timones Ii Año de Maquinas 30.09.2016César De LeónAún no hay calificaciones
- Ejercicios Centroide y Momento InerciaDocumento3 páginasEjercicios Centroide y Momento InerciaSantiago Suárez TovarAún no hay calificaciones
- Altura MetacéntricaDocumento8 páginasAltura MetacéntricaNilton GamarraAún no hay calificaciones
- Centro de CarenaDocumento11 páginasCentro de CarenaMiguel Angel Castro Ramos100% (1)
- Criterios de EstabilidadDocumento6 páginasCriterios de Estabilidadkikered21Aún no hay calificaciones
- Ejercicios sobre elasticidad y resistencia de materialesDe EverandEjercicios sobre elasticidad y resistencia de materialesAún no hay calificaciones
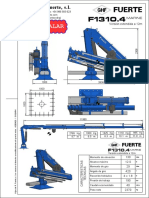
- Grúa Fuerte F1310ar 4 - Catalogo A INSTALARDocumento2 páginasGrúa Fuerte F1310ar 4 - Catalogo A INSTALARAnder Lasa G100% (1)
- 50 ANIVERSARIO TecnunDocumento204 páginas50 ANIVERSARIO TecnunAnder Lasa GAún no hay calificaciones
- Simbolos Contra IncendiosDocumento15 páginasSimbolos Contra IncendiosAnder Lasa GAún no hay calificaciones
- PDF ACEROS Construccion1Documento1 páginaPDF ACEROS Construccion1SeshAún no hay calificaciones
- Lectura CríticaDocumento4 páginasLectura CríticaZeidaBermudez0% (2)
- La Isla Del TesoroDocumento5 páginasLa Isla Del TesoroPablo EchavarriaAún no hay calificaciones
- 2 Condell en El Combate Naval de Iquique (German Bravo) PDFDocumento19 páginas2 Condell en El Combate Naval de Iquique (German Bravo) PDFJorge RojasAún no hay calificaciones
- A0833014Documento80 páginasA0833014JOSE LUIS ROA CEAAún no hay calificaciones
- El Contrabando Es El Proceso de Compra y Venta de Mercancía Ilegal o ClandestinaDocumento2 páginasEl Contrabando Es El Proceso de Compra y Venta de Mercancía Ilegal o ClandestinaJose Rios PensoAún no hay calificaciones
- Orzar - ArribarDocumento3 páginasOrzar - ArribarcristianAún no hay calificaciones
- Trabajo Practico CabotajeDocumento22 páginasTrabajo Practico CabotajejAIDERAún no hay calificaciones
- Transporte MarítimoDocumento2 páginasTransporte MarítimoAndy AndrésAún no hay calificaciones
- Modelo de Fiata Bill of Lading FBLDocumento1 páginaModelo de Fiata Bill of Lading FBLAngel Manuel Algarra SanchezAún no hay calificaciones
- 005 - Paneles InformativosDocumento8 páginas005 - Paneles InformativosMarciano AgarAún no hay calificaciones
- 03 - Capitania Maritima y Distritos Maritimos PDFDocumento17 páginas03 - Capitania Maritima y Distritos Maritimos PDFCarlos Enrique Carramiñana PerezAún no hay calificaciones
- Rules Piratoons Esp LDDocumento5 páginasRules Piratoons Esp LDWkrscribdAún no hay calificaciones
- Fubuki (1928) - Wikipedia, La Enciclopedia LibreDocumento2 páginasFubuki (1928) - Wikipedia, La Enciclopedia LibreMilagros KeewongAún no hay calificaciones
- Paz, Marcela - Papelucho HistoriadorDocumento48 páginasPaz, Marcela - Papelucho HistoriadorVillano Bueno100% (1)
- Formato Relacion de GastosDocumento3 páginasFormato Relacion de GastosYERAMI MAURYAún no hay calificaciones
- Codigo ImdgDocumento33 páginasCodigo ImdgElizabeth Angie Estrada GodoyAún no hay calificaciones
- Combate Naval de AbtaoDocumento1 páginaCombate Naval de AbtaoChristian Ojeda G.Aún no hay calificaciones
- Ocw 2011 Maquinasdeelevacionytransporte t7 Gruas Portuarias Santamartajc 1Documento27 páginasOcw 2011 Maquinasdeelevacionytransporte t7 Gruas Portuarias Santamartajc 1rafael espinosa semperAún no hay calificaciones
- Presentación Reglamentación MaritimaDocumento42 páginasPresentación Reglamentación MaritimaGerardo MolinaAún no hay calificaciones
- LEYENDA CUBANA El Capitán DieguilloDocumento7 páginasLEYENDA CUBANA El Capitán DieguilloPedro Marqués de ArmasAún no hay calificaciones
- Patente de NavegaciónDocumento2 páginasPatente de NavegaciónSantiago AndradeAún no hay calificaciones
- Los Mitos de La Armada InvencibleDocumento5 páginasLos Mitos de La Armada InvencibleRoqueAún no hay calificaciones
- FLOTABILIDADDocumento4 páginasFLOTABILIDADmichell stefanny maldonado murilloAún no hay calificaciones
- Envió de Mensajes en El AISDocumento9 páginasEnvió de Mensajes en El AISArtuRo HernándezAún no hay calificaciones
- La Epoca de Los DescubrimientosDocumento4 páginasLa Epoca de Los DescubrimientosMONICA BAÑOS LONCONIAún no hay calificaciones
- Carlos Ruiz RodrÃguez-Hacia Una Mar Del Sur Extensa. La - Costa Musical Afro-PacÃfica 2008Documento15 páginasCarlos Ruiz RodrÃguez-Hacia Una Mar Del Sur Extensa. La - Costa Musical Afro-PacÃfica 2008Ulises YoltlatzotzontliAún no hay calificaciones
- Escuela Nacional de Marina Mercante "Almirante Miguel Graú"Documento16 páginasEscuela Nacional de Marina Mercante "Almirante Miguel Graú"LUIS ANDRES AGUILAR VERAAún no hay calificaciones
- Expedición Transantártica 2005-2006 Con Ramón Larramendi Parte1Documento22 páginasExpedición Transantártica 2005-2006 Con Ramón Larramendi Parte1Tierras Polares Viajes y ExpedicionesAún no hay calificaciones
- Guía 9 Comprensión Lectora Relato HsitóricoDocumento4 páginasGuía 9 Comprensión Lectora Relato HsitóricoLoreto CuadroAún no hay calificaciones