También podría gustarte
- Modelación Dinamica de Sistemas de ControlDocumento13 páginasModelación Dinamica de Sistemas de ControlBryan Omar MendozaAún no hay calificaciones
- Variables de EstadoDocumento49 páginasVariables de EstadoRobertt Stone100% (1)
- Introducción a la geometría analíticaDe EverandIntroducción a la geometría analíticaCalificación: 4 de 5 estrellas4/5 (1)
- Modelado Con ED de Orden Superior1Documento12 páginasModelado Con ED de Orden Superior1Jorge PSAún no hay calificaciones
- Modelado de Un Pendubot Utilizando Matlab y SimulinkDocumento17 páginasModelado de Un Pendubot Utilizando Matlab y SimulinkMuzhu Cole CampozAún no hay calificaciones
- Modelos Matematicos y Funciones de TransferenciaDocumento12 páginasModelos Matematicos y Funciones de TransferenciaFHERFFFAún no hay calificaciones
- Sistemas Mecanicos RotacionalesDocumento24 páginasSistemas Mecanicos RotacionalesGalo Fabara67% (3)
- Modelado de Circuitos ElectricosDocumento30 páginasModelado de Circuitos Electricosjlola100% (1)
- Las Variables de EstadoDocumento13 páginasLas Variables de EstadoORLANDO RODRIGUEZAún no hay calificaciones
- Practica 7 Variable de EstadocDocumento17 páginasPractica 7 Variable de EstadocAlan GutierrezAún no hay calificaciones
- Clase 6 Espacio de Estados PLDocumento30 páginasClase 6 Espacio de Estados PLBRYAN FABIAN SIMBA�A FERNANDEZAún no hay calificaciones
- 6X 19310412 Inv5Documento52 páginas6X 19310412 Inv5OSCAR RUBIO LEONAún no hay calificaciones
- Espacio de EstadoDocumento25 páginasEspacio de EstadoFrancisco Zavala MadariagaAún no hay calificaciones
- Portafolio Oscar MedinaDocumento24 páginasPortafolio Oscar MedinaPablo RamirezAún no hay calificaciones
- Introduccion Al Diseño de Sistemas de Control en Espacio de Estados - PaperDocumento11 páginasIntroduccion Al Diseño de Sistemas de Control en Espacio de Estados - PaperJohanna Inachonta100% (1)
- Rubrica MatlabDocumento18 páginasRubrica MatlabJunior ApazaAún no hay calificaciones
- Estado VariablesDocumento7 páginasEstado VariablesEstebanAún no hay calificaciones
- Tarea 3 Jaime Andre Ponce GallegosDocumento6 páginasTarea 3 Jaime Andre Ponce GallegosAndre PonceAún no hay calificaciones
- SAMI. Capítulo 7Documento57 páginasSAMI. Capítulo 7Brayan Lascano MhAún no hay calificaciones
- Modulo I Control Automatico 4 1Documento7 páginasModulo I Control Automatico 4 1খ্রিস্টান ক্রুশ থেকেAún no hay calificaciones
- Clase 6 Espacio de EstadosDocumento22 páginasClase 6 Espacio de Estadosdarioanael1978Aún no hay calificaciones
- Dinámica de Sistemas y ControlDocumento22 páginasDinámica de Sistemas y ControlZarate BismkAún no hay calificaciones
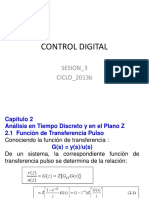
- CONTROL DIGITA - Sesion3lDocumento27 páginasCONTROL DIGITA - Sesion3lMilo VanvanAún no hay calificaciones
- Unidad 2 Modelado de Sistemas DinámicosDocumento22 páginasUnidad 2 Modelado de Sistemas DinámicosAlfonso MartinezAún no hay calificaciones
- Unidad 2 - Modelado MatemáticoDocumento30 páginasUnidad 2 - Modelado Matemáticoangel9021Aún no hay calificaciones
- Variables de EstadoDocumento22 páginasVariables de EstadoDiocelin OsorioAún no hay calificaciones
- Ec. EstadoDocumento48 páginasEc. EstadoEdison SolorzanoAún no hay calificaciones
- Laboratorio ControlDocumento28 páginasLaboratorio ControlManfred ToroAún no hay calificaciones
- Matriz de Función de Transferencia PulsoDocumento10 páginasMatriz de Función de Transferencia PulsoByronSaumettAún no hay calificaciones
- Modelos en Variables de Estado CAPITULO 3-1Documento44 páginasModelos en Variables de Estado CAPITULO 3-1César Aguilar100% (1)
- Dinamica de Sistemas de Control, Variable de Estado, Cap 2Documento17 páginasDinamica de Sistemas de Control, Variable de Estado, Cap 2Tony YespaAún no hay calificaciones
- Practica 4 Grupo BDocumento25 páginasPractica 4 Grupo BVictor ApolinaresAún no hay calificaciones
- Entrada Tipo ParabolaDocumento28 páginasEntrada Tipo ParabolaJuan Camilo NaranjoAún no hay calificaciones
- Señales de EntradaDocumento34 páginasSeñales de EntradaJuan Camilo NaranjoAún no hay calificaciones
- Resumen de Tema 3 de ControlesDocumento11 páginasResumen de Tema 3 de ControlesLuiggi GPAún no hay calificaciones
- 1 Laboratorio de Control FINAL PDFDocumento6 páginas1 Laboratorio de Control FINAL PDFIVAN ALONSO CCAHUACHIA LETONAAún no hay calificaciones
- Función de TransferenciaDocumento5 páginasFunción de TransferenciaJose EkAún no hay calificaciones
- LINEALIZACIONDocumento8 páginasLINEALIZACIONCristhian BarreraAún no hay calificaciones
- TAREA 1 Resumen Del Tema 3Documento16 páginasTAREA 1 Resumen Del Tema 3Scarllet Osuna TostadoAún no hay calificaciones
- Tarea 2.3 - CoronadoArnoldo - Espacio de EstadosDocumento6 páginasTarea 2.3 - CoronadoArnoldo - Espacio de EstadosJESUS ARNOLDO CORONADO QUIJADAAún no hay calificaciones
- Modelos MatematicosDocumento10 páginasModelos MatematicosStephania LuciaAún no hay calificaciones
- Variables de EstadosDocumento12 páginasVariables de EstadosAnthoni CedeñoAún no hay calificaciones
- Coeficiente de AmortiguamientoDocumento9 páginasCoeficiente de Amortiguamientoleopj22Aún no hay calificaciones
- ModelosDocumento5 páginasModelosAdrian O.Mora100% (1)
- 18041155-Evalucion U5-ControlDocumento46 páginas18041155-Evalucion U5-ControlAlex SalcidoAún no hay calificaciones
- Sistemas LTI en Espacio de EstadoDocumento26 páginasSistemas LTI en Espacio de EstadoRuben VelazquezAún no hay calificaciones
- Análisis de Sistemas de Control en El Espacio de EstadoDocumento12 páginasAnálisis de Sistemas de Control en El Espacio de EstadoOmar QCAún no hay calificaciones
- Taller Espacios de EstadoDocumento20 páginasTaller Espacios de EstadoDAVID MARTINEZAún no hay calificaciones
- 113565635Documento18 páginas113565635Naimersoft SolucionesAún no hay calificaciones
- Variables de EstadoDocumento21 páginasVariables de Estadoolac17Aún no hay calificaciones
- Cerebro de OrmigaDocumento53 páginasCerebro de Ormigaceren2010Aún no hay calificaciones
- Ecuacion de TranferenciaDocumento7 páginasEcuacion de TranferenciaAlejo PerezAún no hay calificaciones
- Trabajo Colaborativo 2 Sistemas DinamicosDocumento12 páginasTrabajo Colaborativo 2 Sistemas DinamicosAlex Huertas Urrego100% (1)
- Actividad 3 Señales y SistemasDocumento35 páginasActividad 3 Señales y SistemasCristian RicaurteAún no hay calificaciones
- Laboratorio 1 T PicosDocumento22 páginasLaboratorio 1 T PicosJuan Pablo Cuesta VanegasAún no hay calificaciones
- Transformación lineal directa: Aplicaciones prácticas y técnicas en visión por computadora.De EverandTransformación lineal directa: Aplicaciones prácticas y técnicas en visión por computadora.Aún no hay calificaciones
- Fisi.1208.221.1.t2-Grupo 13Documento7 páginasFisi.1208.221.1.t2-Grupo 13jose alvaAún no hay calificaciones
- Informe Viscosidad GlobalDocumento6 páginasInforme Viscosidad GlobalJeferson DavidAún no hay calificaciones
- PaginaDocumento5 páginasPaginaRobPAún no hay calificaciones
- C13 ColisionesDocumento6 páginasC13 ColisionesRegina De CUNHA100% (2)
- Examen Matemáticas II de Andalucía (Ordinaria de 2021) (WWW - Examenesdepau.com)Documento2 páginasExamen Matemáticas II de Andalucía (Ordinaria de 2021) (WWW - Examenesdepau.com)Julio Toboso GarcíaAún no hay calificaciones
- Alren Bach G M1 U1Documento8 páginasAlren Bach G M1 U1JoséAún no hay calificaciones
- Guía 5 - Gráfica de Una Ecuación CuadráticaDocumento2 páginasGuía 5 - Gráfica de Una Ecuación CuadráticaIsrael MendozaAún no hay calificaciones
- Coeficiente de Asociacion Q de YuleDocumento17 páginasCoeficiente de Asociacion Q de YuleGraciela Núñez Bedoya100% (1)
- ANALISIS MATEMATICO III - Virtual - 2021.docx-SignedDocumento15 páginasANALISIS MATEMATICO III - Virtual - 2021.docx-SignedGURUAún no hay calificaciones
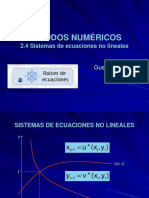
- 2.4 Sistemas de Ecuaciones No LinealesDocumento30 páginas2.4 Sistemas de Ecuaciones No LinealesGui Do EspAún no hay calificaciones
- Ecuaciones Diferenciales Ordinarias IDocumento5 páginasEcuaciones Diferenciales Ordinarias ILuis M ReyesAún no hay calificaciones
- Algoritmo de CasteljauDocumento13 páginasAlgoritmo de CasteljauJesica RamirezAún no hay calificaciones
- Paquete 11MATEM3BCEMATY3ABCDVESPLERSCICLO21-22Documento9 páginasPaquete 11MATEM3BCEMATY3ABCDVESPLERSCICLO21-22Luis Eliseo Rodriguez SanchezAún no hay calificaciones
- TRABAJO PRÁCTICO #7 Recta y PlanoDocumento7 páginasTRABAJO PRÁCTICO #7 Recta y Planoprof_menunezAún no hay calificaciones
- Matemáticas A X GDocumento368 páginasMatemáticas A X GlufoAún no hay calificaciones
- Portafolio de Evidencias para El Aula VirtualDocumento26 páginasPortafolio de Evidencias para El Aula VirtualJosé Luis Rojas RodríguezAún no hay calificaciones
- Guia Grado 11° 2 TrimestreDocumento154 páginasGuia Grado 11° 2 TrimestreAndres MonterrowsAún no hay calificaciones
- Sostenimiento Por Metodos Numéricos-Phase2Documento16 páginasSostenimiento Por Metodos Numéricos-Phase2Fernando MedinaAún no hay calificaciones
- Práctica Álgebra2021-1Documento3 páginasPráctica Álgebra2021-1maria alejandra alfonso gutierrezAún no hay calificaciones
- Sílabo Matemática I-A2Documento5 páginasSílabo Matemática I-A2Alex UsurinAún no hay calificaciones
- Problemas RCLDocumento4 páginasProblemas RCLFrankling FAún no hay calificaciones
- Capitulo 29 Fermentación Microbiana Limitada Por El SustratoDocumento21 páginasCapitulo 29 Fermentación Microbiana Limitada Por El SustratoEnauris MateoAún no hay calificaciones
- Cálculo Avanzado para IngenieríaDocumento12 páginasCálculo Avanzado para IngenieríaMicky BozaAún no hay calificaciones
- Capítulo 2 Programación Lineal - Planteamiento Del ProblemaDocumento15 páginasCapítulo 2 Programación Lineal - Planteamiento Del ProblemalviverosrAún no hay calificaciones
- Ecua Dif Diego MilanDocumento12 páginasEcua Dif Diego MilanBenz ZeonAún no hay calificaciones
- Guia Latex 72 76Documento5 páginasGuia Latex 72 76darwinHPAún no hay calificaciones
- Circuitos de Segundo OrdenDocumento38 páginasCircuitos de Segundo OrdenClauFakeAún no hay calificaciones
- Analisis DimensionalDocumento23 páginasAnalisis DimensionalCyber100% (1)