También podría gustarte
- Diagrama Produccion de EstirenoDocumento1 páginaDiagrama Produccion de EstirenoMario Rod's100% (1)
- Aceite Esencial de OréganoDocumento33 páginasAceite Esencial de OréganoMario Rod's100% (1)
- Controlador Proporcional DerivativoDocumento5 páginasControlador Proporcional DerivativoLupiiTa QiiRoz Carliin100% (1)
- Introducción a las señales y sistemasDe EverandIntroducción a las señales y sistemasCalificación: 4.5 de 5 estrellas4.5/5 (3)
- Modelamiento y casos especiales de la cinética química heterogéneaDe EverandModelamiento y casos especiales de la cinética química heterogéneaCalificación: 3 de 5 estrellas3/5 (1)
- Método de Ziegler-NicholsDocumento4 páginasMétodo de Ziegler-NicholsDavid Iván Rosales Soto100% (1)
- Sistemas de Primer OrdenDocumento25 páginasSistemas de Primer OrdenAntonio BasalduaAún no hay calificaciones
- Catalisis Fisicoquimica IiDocumento18 páginasCatalisis Fisicoquimica IiMario Rod's50% (2)
- Matematicas Aplicadas A La AdministracionDocumento51 páginasMatematicas Aplicadas A La AdministracionJC MuniveAún no hay calificaciones
- Control Proporcional IntegralDocumento31 páginasControl Proporcional IntegralFernando Ramírez100% (1)
- Ejemplos de Modelado Matemático de Sistemas MecánicosDocumento8 páginasEjemplos de Modelado Matemático de Sistemas MecánicoscontrolclasicoiemAún no hay calificaciones
- Tarea 1 Unidad 4 Tecnicas de ControlDocumento14 páginasTarea 1 Unidad 4 Tecnicas de ControlMario Rod's100% (1)
- Unidad 3. Transformada de Laplace y Series de FourierDocumento79 páginasUnidad 3. Transformada de Laplace y Series de FourierCAROLINA100% (1)
- Capitulo 5. Elementos Finales de ControlDocumento0 páginasCapitulo 5. Elementos Finales de ControlHeller AriasAún no hay calificaciones
- Normas SAMADocumento14 páginasNormas SAMAAlejandro AbonceAún no hay calificaciones
- Sistema de Primer OrdenDocumento30 páginasSistema de Primer Ordenpaola ordazAún no hay calificaciones
- 2.5 Sistemas de Segundo OrdenDocumento15 páginas2.5 Sistemas de Segundo OrdenWilberth Navarrete CelestinoAún no hay calificaciones
- Evaluacion de Los Aprendizajes PDFDocumento270 páginasEvaluacion de Los Aprendizajes PDFRicardo Torres CantúAún no hay calificaciones
- Clase 2 16-02-2021Documento22 páginasClase 2 16-02-2021Daniela Franco OsorioAún no hay calificaciones
- Modelos de Sistemas de Primer y Segundo OrdenDocumento7 páginasModelos de Sistemas de Primer y Segundo OrdenAlejandro Mario Alcala GranjaAún no hay calificaciones
- Unidad 3 y 4 de InstrumentaciónDocumento25 páginasUnidad 3 y 4 de InstrumentaciónChristian Ramírez Vargas100% (1)
- Modelacion Dinamica de Sistemas de Control Unidad 2Documento21 páginasModelacion Dinamica de Sistemas de Control Unidad 2Jason MaldonadoAún no hay calificaciones
- 2.3 LinealizacionDocumento21 páginas2.3 LinealizacionKristian Coba0% (1)
- 3.2 Desarrollo de Funciones de TransferenciaDocumento7 páginas3.2 Desarrollo de Funciones de TransferenciaMartha L Pv RAún no hay calificaciones
- No Idealidades de Los Reactores QuímicosDocumento10 páginasNo Idealidades de Los Reactores QuímicospaudiazAún no hay calificaciones
- Técnicas de Sintonización de ControladoresDocumento6 páginasTécnicas de Sintonización de ControladoresJuankSalazarAún no hay calificaciones
- Fluidización Sólido-LíquidoDocumento16 páginasFluidización Sólido-LíquidoAntonio Mora0% (2)
- Introduccion A La Mecanica de FluidosDocumento5 páginasIntroduccion A La Mecanica de FluidosSebastian RodriguezAún no hay calificaciones
- 2.3 Seleccion Ruta QuimicaDocumento5 páginas2.3 Seleccion Ruta QuimicaJhonnatan TrespalaciosAún no hay calificaciones
- Perfil de VelocidadDocumento7 páginasPerfil de VelocidadLauri Piamonte100% (1)
- Ev U4 InvestigaciónDocumento25 páginasEv U4 Investigacióndaniel santoyoAún no hay calificaciones
- Criterio Cohen CoonDocumento10 páginasCriterio Cohen Coonantonio menoscalAún no hay calificaciones
- PD - Ingeniería de Control de Procesos - U3Documento14 páginasPD - Ingeniería de Control de Procesos - U3ruben vazquez basaveAún no hay calificaciones
- Sintonizacion de ControladoresDocumento21 páginasSintonizacion de ControladoresZ Erandi Cortes RodriguezAún no hay calificaciones
- 1.3.1tipos de Valvulas Automaticas de Control de CaudalDocumento20 páginas1.3.1tipos de Valvulas Automaticas de Control de CaudalDiamante Hernandez Merida0% (1)
- Modelacion Dinamica de Sistemas de Control Unidad 2Documento20 páginasModelacion Dinamica de Sistemas de Control Unidad 2reysapo60% (5)
- Regulador y ServoDocumento3 páginasRegulador y ServoEuiler Diego Diaz LuqueAún no hay calificaciones
- Ingenieria de Control Clasico, Presentacion Control en CascadaDocumento24 páginasIngenieria de Control Clasico, Presentacion Control en Cascadaanon_993797739Aún no hay calificaciones
- Bloques Funcionales de Sistemas Térmicos Formación de Un Modelo para Un Sistemas TérmicoDocumento7 páginasBloques Funcionales de Sistemas Térmicos Formación de Un Modelo para Un Sistemas TérmicoJavier RodriguezAún no hay calificaciones
- Ejercicios Resueltos 3er ParcialDocumento3 páginasEjercicios Resueltos 3er ParcialEdwin Santiago Villegas AuquesAún no hay calificaciones
- Problemas de Aplicación Reactores IdealesDocumento4 páginasProblemas de Aplicación Reactores IdealesjorgeAún no hay calificaciones
- Clasificacion de ControladoresDocumento11 páginasClasificacion de ControladoresHockenhaimAún no hay calificaciones
- Tipos de AdsorcionDocumento2 páginasTipos de AdsorcionCarolinaLópezAún no hay calificaciones
- Tema 2 Sistemas de Segundo OrdenDocumento24 páginasTema 2 Sistemas de Segundo OrdenEstefany CervantesAún no hay calificaciones
- Linealizacion de SistemasDocumento24 páginasLinealizacion de Sistemasfrancisco alonsoAún no hay calificaciones
- Balance para Primera y Segunda Ley en Sistemas ReactivosDocumento18 páginasBalance para Primera y Segunda Ley en Sistemas ReactivosAnita Zarza BandaAún no hay calificaciones
- Difusividad PDFDocumento6 páginasDifusividad PDFZully CabreraAún no hay calificaciones
- Agitación en Los Reactores BiológicosDocumento3 páginasAgitación en Los Reactores BiológicosKeyko Saouri Lluque GarciaAún no hay calificaciones
- Simbologia S.A.M.A e I.S.ADocumento20 páginasSimbologia S.A.M.A e I.S.AAndReea MontalvoAún no hay calificaciones
- Taller 001 Teoria de Control - PREGUNTASDocumento6 páginasTaller 001 Teoria de Control - PREGUNTASAllen YusedAún no hay calificaciones
- Caracteristicas de Caudal Inherente GraficasDocumento4 páginasCaracteristicas de Caudal Inherente GraficasRoy GutierrezAún no hay calificaciones
- Reactores HeterogeneosDocumento6 páginasReactores HeterogeneosNataly OsorioAún no hay calificaciones
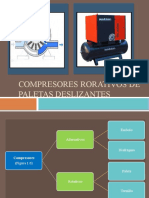
- Compresores Rotativos de PaletasDocumento11 páginasCompresores Rotativos de PaletasFernando Elver GonzalesAún no hay calificaciones
- Norma SamaDocumento8 páginasNorma SamaGera Perez0% (1)
- Mezcladores y AgitadoresDocumento17 páginasMezcladores y AgitadoresGuillermo Luis Rodriguez MendozaAún no hay calificaciones
- Control AnticipativoDocumento20 páginasControl AnticipativoGrecia ChucAún no hay calificaciones
- DesaladoraDocumento21 páginasDesaladoraIvan SanchezAún no hay calificaciones
- Unidad 2Documento7 páginasUnidad 2Estefania MunozAún no hay calificaciones
- Investigación Tema 4Documento7 páginasInvestigación Tema 4Michell MoralesAún no hay calificaciones
- Ev U2 SistemasdeProcesosQuimicosDocumento22 páginasEv U2 SistemasdeProcesosQuimicosAmerica EspinoAún no hay calificaciones
- Respuesta Al Escalon de Sistemas de 2º OrdenDocumento15 páginasRespuesta Al Escalon de Sistemas de 2º OrdenAmanda LarsonAún no hay calificaciones
- Proyecto de ControlDocumento20 páginasProyecto de Controlheribert GonzalezAún no hay calificaciones
- Trabajo de Teoria de ControlDocumento71 páginasTrabajo de Teoria de ControlAlfredo GaytánAún no hay calificaciones
- 1 Técnicas de Control para Sistemas SISO No Clásicos - (YA)Documento28 páginas1 Técnicas de Control para Sistemas SISO No Clásicos - (YA)tirat_aunpozoAún no hay calificaciones
- Expo Tema 4.2Documento23 páginasExpo Tema 4.2Mariana Leyva EspinozaAún no hay calificaciones
- Tarea3 Mickeal Raad Sistema DinamicosDocumento22 páginasTarea3 Mickeal Raad Sistema DinamicosMaikel RaadAún no hay calificaciones
- Formato Manual de CalidadDocumento18 páginasFormato Manual de CalidadMario Rod'sAún no hay calificaciones
- Demanda Quimica de Oxigeno Reporte de PracticaDocumento10 páginasDemanda Quimica de Oxigeno Reporte de PracticaMario Rod's100% (1)
- Reactores No Ideales Unidad 3Documento10 páginasReactores No Ideales Unidad 3Mario Rod'sAún no hay calificaciones
- Dispositivos de Medición de Temperatura.Documento27 páginasDispositivos de Medición de Temperatura.Mario Rod'sAún no hay calificaciones
- Algebra de Bloques y Diagramas de Bloques en Control Automatico de Procesos UNIDAD 3 Instrumentación y Control Ingeniería Química.Documento8 páginasAlgebra de Bloques y Diagramas de Bloques en Control Automatico de Procesos UNIDAD 3 Instrumentación y Control Ingeniería Química.Mario Rod'sAún no hay calificaciones
- Algebra LinealDocumento11 páginasAlgebra Linealroy flores gutierrezAún no hay calificaciones
- Tema 5 Algebra Lineal PDFDocumento45 páginasTema 5 Algebra Lineal PDFJuan David Escobar HidalgoAún no hay calificaciones
- 1.5 Propiedad de Las DesigualdadesDocumento1 página1.5 Propiedad de Las DesigualdadesDiana Magana0% (1)
- Trabajo Algebra Escenario 3,4,5Documento14 páginasTrabajo Algebra Escenario 3,4,5Karo KstilloAún no hay calificaciones
- Movimiento de Un Objeto Bajo La Acción de Una FuerzaDocumento25 páginasMovimiento de Un Objeto Bajo La Acción de Una FuerzapaolaAún no hay calificaciones
- Guía de Actividades y Rúbrica de Evaluación - Tarea 2 - Sistemas de Ecuaciones Lineales, Rectas, Planos y Espacios VectorialesDocumento20 páginasGuía de Actividades y Rúbrica de Evaluación - Tarea 2 - Sistemas de Ecuaciones Lineales, Rectas, Planos y Espacios VectorialesYamileth Patricia Claros25% (4)
- Contraste de Hipótesis: CapituloDocumento58 páginasContraste de Hipótesis: CapituloFatima del Pilar Espinoza MirandaAún no hay calificaciones
- Unidad UnoDocumento102 páginasUnidad UnoEmerson TipanAún no hay calificaciones
- Manual de Riego Por Aspersion PortatilDocumento69 páginasManual de Riego Por Aspersion PortatilMauricioZuritaBarona100% (1)
- Matematica 1, Financiera Primer SemestreDocumento9 páginasMatematica 1, Financiera Primer SemestreOsdyAún no hay calificaciones
- Matrices en La Ing CivilDocumento20 páginasMatrices en La Ing CivilZUNIGA FLORES ADEMIR FRANKAún no hay calificaciones
- RegresionDocumento35 páginasRegresionEvelyn SerranoAún no hay calificaciones
- MehDocumento18 páginasMehBrian M. Carrillo ChairezAún no hay calificaciones
- 02 Impedancia Propia DipolosDocumento33 páginas02 Impedancia Propia DipolosgrawfAún no hay calificaciones
- MT 064 SolucionDocumento24 páginasMT 064 SolucionhectorAún no hay calificaciones
- Practica OceanografiaDocumento22 páginasPractica OceanografiajcnavamoAún no hay calificaciones
- Davis & McKeown - Capitulo 1 PDFDocumento22 páginasDavis & McKeown - Capitulo 1 PDFleer123456100% (1)
- Ajustes de Zero y Span en Transmisores Analógicos Siempre Nos Toparemos Con AlgunoDocumento3 páginasAjustes de Zero y Span en Transmisores Analógicos Siempre Nos Toparemos Con AlgunoHJAún no hay calificaciones
- Diseño de Experimentos de TaguchiDocumento47 páginasDiseño de Experimentos de TaguchiAlejandra MartinezAún no hay calificaciones
- Estimacion LinealDocumento9 páginasEstimacion LinealmarzinusAún no hay calificaciones
- Secme-30549 1Documento45 páginasSecme-30549 1Mobius FcmAún no hay calificaciones
- Función Cuadrática y LinealDocumento4 páginasFunción Cuadrática y LinealMaicol AlexAún no hay calificaciones
- Gráficos y FuncionesDocumento8 páginasGráficos y FuncioneslorenadalboAún no hay calificaciones
- Ec Diferencial EstudiarDocumento13 páginasEc Diferencial Estudiarbyron guerreroAún no hay calificaciones
- Ime 2201Documento153 páginasIme 2201Andres Orlando Rodriguez R.Aún no hay calificaciones
- Resumen 52-57Documento2 páginasResumen 52-57Galilea BandaAún no hay calificaciones
- Capitulo Vi Series de FourierDocumento158 páginasCapitulo Vi Series de FourierDAVID ISAI PLOMOZO VALDEZAún no hay calificaciones