También podría gustarte
- Manual Redes de Comunicación y Can BusDocumento8 páginasManual Redes de Comunicación y Can BusJose Luis EcheverriaAún no hay calificaciones
- Tma - Aritmética Aplicada A La Mecanica IDocumento103 páginasTma - Aritmética Aplicada A La Mecanica IJosue Sisimith100% (4)
- CanbusDocumento36 páginasCanbusEduardo Cruz100% (3)
- CTA CAN BUS Introducción A Los Sistemas de Comunicación PDFDocumento73 páginasCTA CAN BUS Introducción A Los Sistemas de Comunicación PDFluis rivera100% (1)
- Estructura Redes Multiplexadas PDFDocumento51 páginasEstructura Redes Multiplexadas PDFMiguel ruiz100% (3)
- Proyecto AutotronicaDocumento9 páginasProyecto AutotronicaOrdoñezLuis100% (1)
- Redes Multiplexadas CanDocumento7 páginasRedes Multiplexadas CanEDGAR GEOVANI GUTIERREZ QUISPEAún no hay calificaciones
- Redes de Comunicacion y Multiplexado 1 PDFDocumento20 páginasRedes de Comunicacion y Multiplexado 1 PDFhernan100% (2)
- Manual Español Reloj Checador Control Acceso Huella Digital VER3.6Documento119 páginasManual Español Reloj Checador Control Acceso Huella Digital VER3.6www.aplicacionestecnologicas.com100% (2)
- GBI Escenario3 OtoC ERPDocumento12 páginasGBI Escenario3 OtoC ERPAna HoyosAún no hay calificaciones
- Procesamiento DistribuidoDocumento9 páginasProcesamiento DistribuidoEduardo Gutierrez JulianAún no hay calificaciones
- Memoria de Trabajo Profesional Ejemplo CBTDocumento69 páginasMemoria de Trabajo Profesional Ejemplo CBTAlexsander Hinojosa Rosas50% (2)
- InformeDocumento61 páginasInformeEstuardo PisfilAún no hay calificaciones
- Permisos-1 SolucionesDocumento4 páginasPermisos-1 SolucionesCristina CarrascosaAún no hay calificaciones
- Digitales III LIN BUSDocumento22 páginasDigitales III LIN BUSGenaro Rodriguez Reyno100% (1)
- Grupo 2 - LinDocumento27 páginasGrupo 2 - LinDaniel Gomez100% (1)
- Bus LinDocumento17 páginasBus LinSantiago Mejia Gonzalez100% (1)
- Informe MultiplexadoDocumento12 páginasInforme MultiplexadoJJ Ochoa AlvarezAún no hay calificaciones
- Sistema de Multiplexado de Datos LIN-BusDocumento17 páginasSistema de Multiplexado de Datos LIN-BusKevin Strong100% (1)
- Sistema de Comunicacion CAN BUSDocumento34 páginasSistema de Comunicacion CAN BUSManolo Castillo100% (1)
- El MultiplexadoDocumento12 páginasEl MultiplexadoClaudio Silva100% (1)
- EEC03 Diagnóstico de Las Redes de Comunicación AutomotricesDocumento94 páginasEEC03 Diagnóstico de Las Redes de Comunicación AutomotricesEsteban MunaresAún no hay calificaciones
- ECU Centralita Motor Automovil PDFDocumento18 páginasECU Centralita Motor Automovil PDFoambesiAún no hay calificaciones
- El Protocolo FLEXRAYDocumento20 páginasEl Protocolo FLEXRAYPirri BlancoAún no hay calificaciones
- CAN BUS Introducción A Los Sistemas de Comunicación Del VehículoDocumento33 páginasCAN BUS Introducción A Los Sistemas de Comunicación Del Vehículogdelgadoc82% (11)
- Sistemas MultiplexadosDocumento16 páginasSistemas Multiplexadosgdelgadoc100% (5)
- Diagnosticar Un Red CANDocumento10 páginasDiagnosticar Un Red CANLopez Maciel100% (2)
- 8 Sonda Lambda de Banda AnchaDocumento17 páginas8 Sonda Lambda de Banda AnchaStevens DamazoAún no hay calificaciones
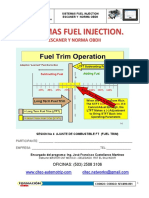
- Fuel TrimDocumento5 páginasFuel TrimAntonio López Sacramento100% (1)
- Hella MultiplexadoDocumento158 páginasHella MultiplexadoFranTSB100% (4)
- Protocolos de Comunicación y Sistema Multiplexado AutomotrizDocumento18 páginasProtocolos de Comunicación y Sistema Multiplexado AutomotrizKinito Méndez100% (4)
- Control Electronico HyundaiDocumento34 páginasControl Electronico HyundaiJose Luis LopezAún no hay calificaciones
- Manual Diagnostico Reparacion Sistema Can Bus Red Area Control Nissan Comunicacion Procedimiento Solucion Problemas PDFDocumento21 páginasManual Diagnostico Reparacion Sistema Can Bus Red Area Control Nissan Comunicacion Procedimiento Solucion Problemas PDFTORREZOTEAún no hay calificaciones
- Fallas Red CanDocumento3 páginasFallas Red Canangel100% (2)
- Multiplexado Redes Can BusDocumento4 páginasMultiplexado Redes Can BusJason DaNny FloResAún no hay calificaciones
- Escáner AutomotrizDocumento9 páginasEscáner AutomotrizDerio100% (1)
- UT05. Redes Multiplexadas - CAN Bus de DatosDocumento57 páginasUT05. Redes Multiplexadas - CAN Bus de DatosivonAún no hay calificaciones
- Estudio Del Sistema de Redes y Multiplexado Can en El AutomóvilDocumento41 páginasEstudio Del Sistema de Redes y Multiplexado Can en El AutomóvilFranzua RiosAún no hay calificaciones
- MULTIPLEXADODocumento89 páginasMULTIPLEXADOCristhian MoralesAún no hay calificaciones
- Redes MultiplexadasDocumento36 páginasRedes Multiplexadassalvador100% (1)
- Sensor Maf - Tabla de Valores Del Voltaje Sensor MafDocumento1 páginaSensor Maf - Tabla de Valores Del Voltaje Sensor MafJuan Carlos Lendoiro100% (1)
- Compresión RelativaDocumento4 páginasCompresión RelativaJorge Luis Garcia Arevalo100% (1)
- Sensor de La BateriaDocumento4 páginasSensor de La BateriaJaime BecerraAún no hay calificaciones
- Cise ElectronicDocumento38 páginasCise ElectronicWalter Puca100% (2)
- Evolucion ABS ESPDocumento41 páginasEvolucion ABS ESPAnonymous a3tl7UW48gAún no hay calificaciones
- Procedimiento de Diagnóstico de Sensores y Actuadores - Manquel, Gonzalez, NiñoDocumento9 páginasProcedimiento de Diagnóstico de Sensores y Actuadores - Manquel, Gonzalez, NiñoAlbert Children100% (1)
- Inmovilizador Parte UnoDocumento20 páginasInmovilizador Parte UnoGustavo MedranoAún no hay calificaciones
- Redes CanDocumento25 páginasRedes Canrobert_ochoa_20100% (3)
- SFI&OBDIIM10S4Documento10 páginasSFI&OBDIIM10S4Luis Ibaceta V.100% (1)
- Aprenda A Diagnosticar Un Red Can y Que Metodos Debes de EmplearDocumento3 páginasAprenda A Diagnosticar Un Red Can y Que Metodos Debes de EmplearJaimer Yersiño Riveros ReyesAún no hay calificaciones
- 5.1 Sensor de Oxigeno de Banda AnchaDocumento10 páginas5.1 Sensor de Oxigeno de Banda AnchaRonaldo Matias100% (1)
- Redes MultiplexadasDocumento58 páginasRedes MultiplexadasReneReinaldo100% (1)
- Redes MultiplexadasDocumento15 páginasRedes MultiplexadasMarcos Josué Flores GarcíaAún no hay calificaciones
- Manual Canbus 2Documento170 páginasManual Canbus 2Martin100% (2)
- ¿Qué Es El CAN BUS y Cómo Funciona - INGENIERÍA Y MECÁNICA AUTOMOTRIZDocumento4 páginas¿Qué Es El CAN BUS y Cómo Funciona - INGENIERÍA Y MECÁNICA AUTOMOTRIZVictor A Ortega DAún no hay calificaciones
- Averias en El Sistema Multiplexado - CANbus PDFDocumento23 páginasAverias en El Sistema Multiplexado - CANbus PDFjmarsaajosAún no hay calificaciones
- Diagnóstico de Red CAN BUSDocumento18 páginasDiagnóstico de Red CAN BUSAngel Leon Fuerte100% (1)
- 073-Sistema LPG en Vehiculos SkodaDocumento48 páginas073-Sistema LPG en Vehiculos SkodaFranTSBAún no hay calificaciones
- Redes Multiplexadas en AutomocionDocumento17 páginasRedes Multiplexadas en AutomocionAleck VieyraAún no hay calificaciones
- Análisis de chorros diésel mediante fluorescencia inducida por laserDe EverandAnálisis de chorros diésel mediante fluorescencia inducida por laserAún no hay calificaciones
- Sistema de Multiplexado de Datos LIN-BusDocumento11 páginasSistema de Multiplexado de Datos LIN-Bushugos31Aún no hay calificaciones
- Bus LinDocumento4 páginasBus LinMichael'o Robayo100% (1)
- Red LinDocumento3 páginasRed Linsergio salgadoAún no hay calificaciones
- Sistema Canbus y Buslin AutomotrizDocumento7 páginasSistema Canbus y Buslin Automotrizjunior1986191699Aún no hay calificaciones
- BUS LinDocumento3 páginasBUS LinJavierAún no hay calificaciones
- Cómo Identificar y Diagnosticar Una Red LINDocumento16 páginasCómo Identificar y Diagnosticar Una Red LINJosé PerdomoAún no hay calificaciones
- Qué Es El BUS Lin y Cómo FuncionaDocumento2 páginasQué Es El BUS Lin y Cómo Funcionaruiz frank rodriguez herreraAún no hay calificaciones
- Curso Sistemas OBDIIDocumento4 páginasCurso Sistemas OBDIIJosue SisimithAún no hay calificaciones
- Most BusDocumento26 páginasMost BusJosue SisimithAún no hay calificaciones
- Fallasistema de Encendido ConvencionalDocumento1 páginaFallasistema de Encendido ConvencionalJosue SisimithAún no hay calificaciones
- Distribucion de Valvulas Variable VVTi ToyotaDocumento45 páginasDistribucion de Valvulas Variable VVTi Toyotahenrry_gutierrez100% (14)
- Lazo Cerrado y Lazo AbiertoDocumento2 páginasLazo Cerrado y Lazo AbiertoJosue SisimithAún no hay calificaciones
- Administración Del Mantenimiento Industrial - UnlockedDocumento111 páginasAdministración Del Mantenimiento Industrial - UnlockedJosue Sisimith100% (1)
- Sonda Lambda TTTDocumento40 páginasSonda Lambda TTTJosue Sisimith100% (3)
- Requerimientos Planta Koneko Kpd30lt-2014Documento4 páginasRequerimientos Planta Koneko Kpd30lt-2014german75iAún no hay calificaciones
- Azure Virtual DesktopDocumento7 páginasAzure Virtual DesktopMarlene Yaneth RomeroAún no hay calificaciones
- Actualizaciones de Software Apuntes Mantenimiento PreventivoDocumento9 páginasActualizaciones de Software Apuntes Mantenimiento PreventivoDavid RaymundoAún no hay calificaciones
- Aind3204 s4 ToledoDocumento21 páginasAind3204 s4 ToledoCristobal OlguinAún no hay calificaciones
- 01 Conceptos Basicos de SAP Business OneDocumento19 páginas01 Conceptos Basicos de SAP Business OneluisAún no hay calificaciones
- 21 HONDA E-35TYF610 ES Web CompressedDocumento692 páginas21 HONDA E-35TYF610 ES Web CompressedJulia VaronaAún no hay calificaciones
- Crea CREAR PRESENTACIÓN EN POWER POINT.r Presentación en Power PointDocumento21 páginasCrea CREAR PRESENTACIÓN EN POWER POINT.r Presentación en Power PointMateo PedroAún no hay calificaciones
- InformeDocumento5 páginasInformeJANEL JAVIER MOLINA GONGORA100% (1)
- Proceso de Diseño y Comparacion de Metodos GRASP y SOLIDDocumento8 páginasProceso de Diseño y Comparacion de Metodos GRASP y SOLIDMoises Mina PérezAún no hay calificaciones
- Ejercicio7 ArcGisDocumento10 páginasEjercicio7 ArcGisMirian RoblesAún no hay calificaciones
- Manual Oficial TalanaDocumento14 páginasManual Oficial TalanaSandra AlfaroAún no hay calificaciones
- Licenciamiento de SoftwareDocumento1 páginaLicenciamiento de SoftwareEduardo Repizo GarciaAún no hay calificaciones
- Laboratorio Práctica 3Documento14 páginasLaboratorio Práctica 3Gerardo Ariza AlvarezAún no hay calificaciones
- Teoria Administrativa IIIDocumento37 páginasTeoria Administrativa IIIMynor GarciaAún no hay calificaciones
- Manual Software Ctc100-3x - EspDocumento85 páginasManual Software Ctc100-3x - EspDaniel rodriguezAún no hay calificaciones
- Paso A Paso - Combinar Correspondencia en Microsoft Office Word PDFDocumento11 páginasPaso A Paso - Combinar Correspondencia en Microsoft Office Word PDFkelly tatiana morelo hinestrozaAún no hay calificaciones
- Capitulo 9 - POODocumento34 páginasCapitulo 9 - POOJAVIER ALEJANDRO CONTRERAS MORAAún no hay calificaciones
- Actividad Indivual Seguridad Redes Actividad 1 - Alejandro Hernandez PeñaDocumento9 páginasActividad Indivual Seguridad Redes Actividad 1 - Alejandro Hernandez PeñaAlejandro HernandezAún no hay calificaciones
- Cop AplicavaDocumento176 páginasCop AplicavapedagogiaAún no hay calificaciones
- Resumen WindowsDocumento2 páginasResumen WindowsGissell RodríguezAún no hay calificaciones
- Examen de Informática Básica CoapaDocumento5 páginasExamen de Informática Básica Coapamaritza lopez ayala75% (4)
- Windows 11Documento2 páginasWindows 11Ramiro InterianoAún no hay calificaciones
- Sistema Regulador de Temperaturas Con MicrocontroladoresDocumento170 páginasSistema Regulador de Temperaturas Con MicrocontroladoresFrancisco Jose Padrino GoyaAún no hay calificaciones
- Control Danfos GuiaDocumento24 páginasControl Danfos GuiaCamilo Andres Garzon MejiaAún no hay calificaciones