También podría gustarte
- Programación de microcontroladores paso a paso: Ejemplos prácticos desarrollados en la nubeDe EverandProgramación de microcontroladores paso a paso: Ejemplos prácticos desarrollados en la nubeAún no hay calificaciones
- Internet de las cosas: Un futuro hiperconectado: 5G, Inteligencia Artificial, Big Data, Cloud, Blockchain, CiberseguridadDe EverandInternet de las cosas: Un futuro hiperconectado: 5G, Inteligencia Artificial, Big Data, Cloud, Blockchain, CiberseguridadCalificación: 5 de 5 estrellas5/5 (2)
- Tabla Comparativa de Las Metodologias de Ingenieria de SoftwareDocumento7 páginasTabla Comparativa de Las Metodologias de Ingenieria de SoftwareSergioAún no hay calificaciones
- Robot Seguidor PDFDocumento15 páginasRobot Seguidor PDFM1lw4rAún no hay calificaciones
- Carrito Seguidor de LineaDocumento22 páginasCarrito Seguidor de LineamikelkatenaAún no hay calificaciones
- Proyecto Final de Cafi 2Documento7 páginasProyecto Final de Cafi 2Anghelo David Palomino ArevaloAún no hay calificaciones
- 02 - Moran Urcia Yoexer EliasDocumento7 páginas02 - Moran Urcia Yoexer EliasElias TorresAún no hay calificaciones
- Laboratorio de Sistemas Electronicos - Modelo Fundamental Brazo RoboticoDocumento7 páginasLaboratorio de Sistemas Electronicos - Modelo Fundamental Brazo RoboticoallgamerAún no hay calificaciones
- Tres Artículos de RobóticaDocumento7 páginasTres Artículos de RobóticaElias TorresAún no hay calificaciones
- Electronica Aplicada IEEEDocumento6 páginasElectronica Aplicada IEEEJulian RoaAún no hay calificaciones
- Sun A MiDocumento3 páginasSun A MiSLAHUE2012Aún no hay calificaciones
- Burgasi Carvajal Espin Freire Paez VillarroelDocumento24 páginasBurgasi Carvajal Espin Freire Paez VillarroelJonathan FalconAún no hay calificaciones
- Robotica para CiegosDocumento115 páginasRobotica para CiegosmarkAún no hay calificaciones
- Diseño y Construcción de Un Robot Seguidor de LíneaDocumento8 páginasDiseño y Construcción de Un Robot Seguidor de LíneaDeyvis Gonzales Guevara0% (1)
- Informe Proyecto Final Electronica AvanzadaDocumento26 páginasInforme Proyecto Final Electronica AvanzadaJhonatan Kevin OrozaAún no hay calificaciones
- Ensayo Construccion de Un Robot MovilDocumento9 páginasEnsayo Construccion de Un Robot MovilAndre LoeraAún no hay calificaciones
- Informe de RoboticaDocumento11 páginasInforme de RoboticaBayron EduardoAún no hay calificaciones
- Reporte Seguidor de LineaDocumento16 páginasReporte Seguidor de LineaJaime LMAún no hay calificaciones
- I Cuadrado CDocumento9 páginasI Cuadrado CAniitaVásconezAún no hay calificaciones
- PASO 3 - Grupo 309696 - 51Documento8 páginasPASO 3 - Grupo 309696 - 51jarolAún no hay calificaciones
- Máquina Dispensadora de Snacks, Con Un Control Sincrónico Basado en Software LibreDocumento14 páginasMáquina Dispensadora de Snacks, Con Un Control Sincrónico Basado en Software LibreRawi Montilla100% (1)
- Protocolo Actividad FinalDocumento13 páginasProtocolo Actividad Finaljamilvlez68Aún no hay calificaciones
- Reporte HexápodoDocumento8 páginasReporte HexápodoRosendo de OzAún no hay calificaciones
- Dron AcuaticoDocumento48 páginasDron AcuaticoMarcelo StéfanoAún no hay calificaciones
- Informe Final Microprocesadores Sensor UltrasonicoDocumento4 páginasInforme Final Microprocesadores Sensor UltrasonicoCharles Rhodes RhodesAún no hay calificaciones
- Brújula Digital MagnéticaDocumento106 páginasBrújula Digital MagnéticakennyAún no hay calificaciones
- SemaforosDocumento11 páginasSemaforosNous OfaceAún no hay calificaciones
- Carrito Seguidor de LineaDocumento22 páginasCarrito Seguidor de LineaAlejandro RodriguezAún no hay calificaciones
- Carro Seguidor de LineaDocumento9 páginasCarro Seguidor de LineaCharly ArizmendiAún no hay calificaciones
- SeguidorfinalDocumento11 páginasSeguidorfinalDavid Rincón SánchezAún no hay calificaciones
- Proyecto - Investigacion - G4 OficialDocumento10 páginasProyecto - Investigacion - G4 OficialJesús VOAún no hay calificaciones
- Aplicación Práctica Utilizando Microcontroladores Carro Seguidor de LineaDocumento20 páginasAplicación Práctica Utilizando Microcontroladores Carro Seguidor de LineaJohan Man LealAún no hay calificaciones
- Proyecto Final DG1Documento10 páginasProyecto Final DG1David Rincón SánchezAún no hay calificaciones
- Esquemadecodificacion Manchester IvanDanielCruzGarcia 11140862 PDFDocumento13 páginasEsquemadecodificacion Manchester IvanDanielCruzGarcia 11140862 PDFIvanCgAún no hay calificaciones
- P12 SmicroprocesadosDocumento4 páginasP12 SmicroprocesadosNabor Alfredo Labias DiazAún no hay calificaciones
- 42 Jaime Andres Vanegas Beltran - Fase 1 - Aporte IndividualDocumento8 páginas42 Jaime Andres Vanegas Beltran - Fase 1 - Aporte IndividualAlejita ApraezAún no hay calificaciones
- Práctica2 InformeDocumento20 páginasPráctica2 InformeInesita Ramirez MorlaAún no hay calificaciones
- Detector de Colores Con ArduinoDocumento10 páginasDetector de Colores Con ArduinoCesar Beltrán HernándezAún no hay calificaciones
- Robot Seguidor de LineaDocumento9 páginasRobot Seguidor de Linearsjgamer2829Aún no hay calificaciones
- Prototipo de Dobladora de AlambreDocumento7 páginasPrototipo de Dobladora de AlambreEDWYN RUBEN CAZARES TORRESAún no hay calificaciones
- Modelado y Control de Un Propulsor para Robot Submarino Tele-Operado (ROV)Documento6 páginasModelado y Control de Un Propulsor para Robot Submarino Tele-Operado (ROV)Cristhian CasarrubiasAún no hay calificaciones
- LAB 3.3 - Proyecto FinalDocumento9 páginasLAB 3.3 - Proyecto FinalAlejo AngaritaAún no hay calificaciones
- AutomatasDocumento10 páginasAutomatasstephannya ArcinegasAún no hay calificaciones
- Robot Trepador Controlado Via Radio MediDocumento3 páginasRobot Trepador Controlado Via Radio MediLuis G. MendozaAún no hay calificaciones
- Documento Final Brazo Robótico Versión Final PDFDocumento112 páginasDocumento Final Brazo Robótico Versión Final PDFCHICO CUBOAún no hay calificaciones
- Control de Brazo Robótico de 5 Grados de LibertadDocumento15 páginasControl de Brazo Robótico de 5 Grados de LibertadVictor CondoriAún no hay calificaciones
- Procesador Motorola 68000Documento13 páginasProcesador Motorola 68000Henner Rivas Be̶r̶r̶i̶o̶Aún no hay calificaciones
- Robot Seguidor de LineaDocumento17 páginasRobot Seguidor de LineaShuely100% (6)
- U2 - Reporte de Practica Num. 2Documento11 páginasU2 - Reporte de Practica Num. 2FERNANDEZ MORALES EDSON YAHIRAún no hay calificaciones
- DISEÑO Y CONSTRUCCION DE UN ROBOT EXPLORADOR (Resumen)Documento4 páginasDISEÑO Y CONSTRUCCION DE UN ROBOT EXPLORADOR (Resumen)joseiutAún no hay calificaciones
- Robótica CooperativaDocumento9 páginasRobótica CooperativaAnonymous 3LGI6CEAún no hay calificaciones
- 1 Anteproyecto - Corregir - ComentariosDocumento21 páginas1 Anteproyecto - Corregir - Comentariosjohanagrefa27Aún no hay calificaciones
- Informe Robotica MecatronicaDocumento21 páginasInforme Robotica MecatronicaWilfredo OlazabalAún no hay calificaciones
- Brazo Robot SCARA Vision Artificial UpiicsaDocumento10 páginasBrazo Robot SCARA Vision Artificial UpiicsaocobotAún no hay calificaciones
- Informe Robot SumoDocumento10 páginasInforme Robot SumoFrancisco Romeo GalindoAún no hay calificaciones
- Arellano ZLDocumento179 páginasArellano ZLHansvan SalvadorAún no hay calificaciones
- Montajes ElectrónicosDocumento4 páginasMontajes ElectrónicosHoracio Daniel VallejoAún no hay calificaciones
- Control de movimiento en manufactura. Automatización CNC fundamentos de diseño y modelamiento experimentalDe EverandControl de movimiento en manufactura. Automatización CNC fundamentos de diseño y modelamiento experimentalCalificación: 5 de 5 estrellas5/5 (4)
- Administración de redes LAN. Ejercicios prácticos con GNS3De EverandAdministración de redes LAN. Ejercicios prácticos con GNS3Aún no hay calificaciones
- Mantenimiento de infraestructuras de redes locales de datos. ELES0209De EverandMantenimiento de infraestructuras de redes locales de datos. ELES0209Aún no hay calificaciones
- Mi Primer API Rest Con Spring BootDocumento21 páginasMi Primer API Rest Con Spring BootEdwin Nicolas TangarifeAún no hay calificaciones
- Formato de Inspección Pre Uso de H. ManualesDocumento1 páginaFormato de Inspección Pre Uso de H. ManualesSantos eufer cruz elorreagaAún no hay calificaciones
- Manual de Uso y MantenimientoDocumento7 páginasManual de Uso y MantenimientoYovana Teran SanchezAún no hay calificaciones
- LerrDocumento10 páginasLerrMariaFernandaTiconaAún no hay calificaciones
- Documentos Programa Control de Calidad en La IndustriaDocumento128 páginasDocumentos Programa Control de Calidad en La IndustriaDixie Julieth Ibarra RiveraAún no hay calificaciones
- Guia Septimo Segundo Periodo 2016Documento12 páginasGuia Septimo Segundo Periodo 2016juan carlosAún no hay calificaciones
- Exposición Eléctrididad Tarea 3 Apsde304Documento1 páginaExposición Eléctrididad Tarea 3 Apsde304idelso marcelo peredaAún no hay calificaciones
- Normas y Regulaciones de Armónicos y FlickerDocumento6 páginasNormas y Regulaciones de Armónicos y Flickereratoste09100% (1)
- Ejercicio de Investigacion Luis NavarroDocumento5 páginasEjercicio de Investigacion Luis NavarroluisAún no hay calificaciones
- Observaciones ArquitecturaDocumento6 páginasObservaciones ArquitecturaDelexus Jenluc KyAún no hay calificaciones
- 000 Azimut 2007 PDFDocumento112 páginas000 Azimut 2007 PDFTopo SamAún no hay calificaciones
- Auditoria Administrativa - Diagnostico 3Documento11 páginasAuditoria Administrativa - Diagnostico 3Carlos Nina ChavezAún no hay calificaciones
- Las Pedagogías Críticas en Tiempos Del Capitalismo CognitivoDocumento44 páginasLas Pedagogías Críticas en Tiempos Del Capitalismo CognitivoRodrigo Carlos Cornejo ChavezAún no hay calificaciones
- Plan de Mejora PanelesDocumento31 páginasPlan de Mejora PanelesPaula Andrea OCAMPO BEDOYAAún no hay calificaciones
- ApantallamientoDocumento127 páginasApantallamientoJeferson ErickAún no hay calificaciones
- Examen Final CorregidoDocumento13 páginasExamen Final CorregidoElkin CortesAún no hay calificaciones
- C 17Documento7 páginasC 17Jose FerrerAún no hay calificaciones
- Anticipar El Futuro Resumen - Daniel Burrus y John David MannDocumento5 páginasAnticipar El Futuro Resumen - Daniel Burrus y John David MannJesús Rincón LeónAún no hay calificaciones
- Certificados - ElectrónicaDocumento13 páginasCertificados - ElectrónicaJorge Parvina HuaytaAún no hay calificaciones
- 37 Paper Analisis Transitorio Con Laviu (1) .En - EsDocumento10 páginas37 Paper Analisis Transitorio Con Laviu (1) .En - EsMarcelino ZarateAún no hay calificaciones
- Lab 08Documento9 páginasLab 08Diego Alberto Mendieta HuarotoAún no hay calificaciones
- Reporte de Incubadora Con Control ON-OFFDocumento16 páginasReporte de Incubadora Con Control ON-OFFBryan VargasAún no hay calificaciones
- 1-Numeros y Definiciones - RelesDocumento10 páginas1-Numeros y Definiciones - Relestorrezsaul50Aún no hay calificaciones
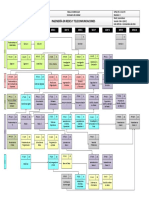
- Ingeniería en Redes Y TelecomunicacionesDocumento1 páginaIngeniería en Redes Y TelecomunicacionesOliver RosasAún no hay calificaciones
- Scamper CafeDocumento3 páginasScamper CafeHENRY JOSEMIR PEREZ GONZALEZAún no hay calificaciones
- Silabo DOE - 3P - 2022 L JDocumento6 páginasSilabo DOE - 3P - 2022 L JYony HernandezAún no hay calificaciones
- Manual de CineclubismoDocumento66 páginasManual de CineclubismoFabián UlloaAún no hay calificaciones
- Capsulas de AckoffDocumento8 páginasCapsulas de AckoffManuel KusaAún no hay calificaciones