También podría gustarte
- 100 circuitos de shields para arduino (español)De Everand100 circuitos de shields para arduino (español)Calificación: 3.5 de 5 estrellas3.5/5 (3)
- Aprender Arduino, electrónica y programación con 100 ejercicios prácticosDe EverandAprender Arduino, electrónica y programación con 100 ejercicios prácticosCalificación: 4.5 de 5 estrellas4.5/5 (14)
- Documento Sin TítuloDocumento27 páginasDocumento Sin TítuloRichiyRamirezGarciaAún no hay calificaciones
- 1 4974682953339634411Documento16 páginas1 4974682953339634411leandro arce torresAún no hay calificaciones
- Sprint 1Documento15 páginasSprint 1David Barroso GAún no hay calificaciones
- Articulo IEEEDocumento6 páginasArticulo IEEEJeferson R VillabonaAún no hay calificaciones
- Alberca AutomatizadaDocumento13 páginasAlberca AutomatizadaAlberto Alcocer EspinosaAún no hay calificaciones
- MANUAL DE OPERACION. Brazo Robótico HELEN - 1Documento15 páginasMANUAL DE OPERACION. Brazo Robótico HELEN - 1RichiyRamirezGarciaAún no hay calificaciones
- Sprint 3Documento21 páginasSprint 3David Barroso GAún no hay calificaciones
- FJFGJDocumento10 páginasFJFGJBrahyan Contreras MesiasAún no hay calificaciones
- Informe 7 JunioDocumento9 páginasInforme 7 JunioNicolas Ignacio Ojeda GuineoAún no hay calificaciones
- Hyundai AvrDocumento30 páginasHyundai AvrivanAún no hay calificaciones
- Dokumen - Tips Registradores de Falla RPV ReasonDocumento48 páginasDokumen - Tips Registradores de Falla RPV Reasonexekiel_77Aún no hay calificaciones
- Robot Controlado Por Bluetoo Con Programación de ArduinoDocumento9 páginasRobot Controlado Por Bluetoo Con Programación de ArduinoRomi Arenas BustinzaAún no hay calificaciones
- Aca1 TecnologiaDocumento4 páginasAca1 TecnologiaDiego Fernando Henao SalinasAún no hay calificaciones
- Prototipado IoTDocumento29 páginasPrototipado IoTDylan Ivan Villarreal ToscanoAún no hay calificaciones
- LoaizaDocumento8 páginasLoaizaJaquelin esimeAún no hay calificaciones
- Circuito para DisplayDocumento38 páginasCircuito para DisplayintermifAún no hay calificaciones
- Presentacion Power Management IcsDocumento24 páginasPresentacion Power Management IcsPablo QuichimboAún no hay calificaciones
- Guia Metodologica Grupal Individual Byron CarreraDocumento20 páginasGuia Metodologica Grupal Individual Byron CarreraAlejoCarreraAún no hay calificaciones
- Catálogo 16 12 2020Documento41 páginasCatálogo 16 12 2020LuisAún no hay calificaciones
- Cinta Transportadora ArduinoDocumento35 páginasCinta Transportadora ArduinoGonzalo Lenarduzzi100% (2)
- Proyecto de Control de Velocidad de Un Motor en CDDocumento40 páginasProyecto de Control de Velocidad de Un Motor en CDErickSaddamAún no hay calificaciones
- Trabajo - MT516 - PT1Documento28 páginasTrabajo - MT516 - PT1JAIRO GABRIEL ALARCON SANCHEZAún no hay calificaciones
- Práctica 3 Microcontroladores FernandoDocumento20 páginasPráctica 3 Microcontroladores FernandoJulio100% (1)
- Registradores de Falla RPV REASONDocumento48 páginasRegistradores de Falla RPV REASONhugoenrique201075% (4)
- Informe Variador de FrecuenciaDocumento9 páginasInforme Variador de FrecuenciaNorberto CFAún no hay calificaciones
- Informe de Micros Contador Descendente Del 9 Al 0Documento10 páginasInforme de Micros Contador Descendente Del 9 Al 0Alex AndradeAún no hay calificaciones
- Disparo y Carga SCRDocumento10 páginasDisparo y Carga SCRJazmin PerezAún no hay calificaciones
- ArduinoDocumento33 páginasArduinoDulce Lucía Lara García100% (1)
- Caracteristicas de Los Componentes Proyecto Grupo 4Documento8 páginasCaracteristicas de Los Componentes Proyecto Grupo 4Miguel angel Salinas lopezAún no hay calificaciones
- DSM Actividad 4Documento15 páginasDSM Actividad 4deya6277Aún no hay calificaciones
- Presentacion Variadores Dimensionamiento y Programacion C100Documento65 páginasPresentacion Variadores Dimensionamiento y Programacion C100Alejandro CastilloAún no hay calificaciones
- Especificaciones Tec, Funcionamiento, ListadoDocumento13 páginasEspecificaciones Tec, Funcionamiento, ListadoJohnKreamerAún no hay calificaciones
- Clase Microcontroladores PDFDocumento164 páginasClase Microcontroladores PDFIsmael SilvaAún no hay calificaciones
- Arduino Con LabViewDocumento6 páginasArduino Con LabViewAndrew Israel QAún no hay calificaciones
- Informe 3 Electronica DigitalDocumento5 páginasInforme 3 Electronica DigitalDolores CedeñoAún no hay calificaciones
- Fichas Tecnicas Mesa LabDocumento8 páginasFichas Tecnicas Mesa LabNatha RojasAún no hay calificaciones
- Equipo 6 Practica 10Documento27 páginasEquipo 6 Practica 10Jorge david Flores CruzAún no hay calificaciones
- Cómo Hacer Un SumobotDocumento20 páginasCómo Hacer Un SumobotJose Neira Galvez100% (1)
- Instituto Politécnico Nacional: Escuela Superior de Ingeniería Mecánica Y Eléctrica Unidad ZacatencoDocumento11 páginasInstituto Politécnico Nacional: Escuela Superior de Ingeniería Mecánica Y Eléctrica Unidad ZacatencoJorge Omar Zenil LabraAún no hay calificaciones
- Ficha Técnica Piezas ArduinoDocumento9 páginasFicha Técnica Piezas ArduinoFreddyAún no hay calificaciones
- Clase 3. Semana 3Documento18 páginasClase 3. Semana 3JUAN PABLO TORRES CONTRERASAún no hay calificaciones
- Investigación ATmega328P IC 0701Documento8 páginasInvestigación ATmega328P IC 0701luis sanchez0% (1)
- Informe Final ElectromecanicaDocumento28 páginasInforme Final ElectromecanicaVixito 999Aún no hay calificaciones
- Manual Antminer D3Documento22 páginasManual Antminer D3Gabriel Andres Mesa100% (3)
- Anexos Trabajo de MecaDocumento8 páginasAnexos Trabajo de MecaJhoel MedranoAún no hay calificaciones
- Informe7 4815 SotomayorIvanna ZuritaVictorDocumento18 páginasInforme7 4815 SotomayorIvanna ZuritaVictorEvelin HidalgoAún no hay calificaciones
- Ae 600Documento28 páginasAe 600Dayron Acosta100% (3)
- Manual Mantenimiento ArduinoDocumento19 páginasManual Mantenimiento ArduinoOsvaldo De LeonAún no hay calificaciones
- Resumen N°3 Cartagena Sanchez BrayanDocumento6 páginasResumen N°3 Cartagena Sanchez BrayanBRAYAN JAFET VEGA NOEAún no hay calificaciones
- Avance de Proyecto Nro. 3Documento7 páginasAvance de Proyecto Nro. 3NiltonRamírezAún no hay calificaciones
- Proyecto FinalDocumento22 páginasProyecto FinalNahs EstudiosAún no hay calificaciones
- Informe T1 Multicuerpo - 2022-2023Documento43 páginasInforme T1 Multicuerpo - 2022-2023jairo alarconAún no hay calificaciones
- Dobladora 5Documento18 páginasDobladora 5Arnau Moreno KoreAún no hay calificaciones
- Arduino UNO Entrada y Salida DigitalDocumento8 páginasArduino UNO Entrada y Salida DigitalRODRIGO ALONZO VELASQUEZ FLORESAún no hay calificaciones
- Tema 3 Carro Seguidor de LìneaDocumento17 páginasTema 3 Carro Seguidor de Lìneagerardo.g.c57144Aún no hay calificaciones
- INFORMEDocumento9 páginasINFORMELuis Fernando Payares GenesAún no hay calificaciones
- Antminer S9k Manual de ReparaciónDocumento21 páginasAntminer S9k Manual de Reparaciónjjg811683% (6)
- Sistema de información para la operación remota de plantas de generación de energía hidroeléctricaDe EverandSistema de información para la operación remota de plantas de generación de energía hidroeléctricaAún no hay calificaciones
- Ley 294 de 1996Documento22 páginasLey 294 de 1996Alejandra FuentesAún no hay calificaciones
- CAT - Autoclave Horizontal - Maternidad - T - Max 8 EP2V - Manual de Uso - Rev 2 - Ago-06Documento112 páginasCAT - Autoclave Horizontal - Maternidad - T - Max 8 EP2V - Manual de Uso - Rev 2 - Ago-06Roger Dante Ronceros SeguraAún no hay calificaciones
- Tipos de DrogasDocumento11 páginasTipos de DrogasAlbe VicAún no hay calificaciones
- Plan de Desarrollo Medellin Futuro 2020-2023 PDFDocumento1278 páginasPlan de Desarrollo Medellin Futuro 2020-2023 PDFDAVID ESTEBAN MENA ZAPATAAún no hay calificaciones
- ODI-03-Ingeniero ConsultorDocumento9 páginasODI-03-Ingeniero ConsultorJessenia RuizAún no hay calificaciones
- Evaluación Comprensión Lectora - Textos VisualesDocumento17 páginasEvaluación Comprensión Lectora - Textos VisualesFabio Bernal100% (1)
- TrigonometríaDocumento7 páginasTrigonometríaValentina CarrascalAún no hay calificaciones
- Determinación de SulfatosDocumento6 páginasDeterminación de SulfatosLagesoanAún no hay calificaciones
- 008 Jullien F. Vivir Existiendo Cap 1Documento32 páginas008 Jullien F. Vivir Existiendo Cap 1Silvana Jordán100% (1)
- Ideas de Negocio Cultura OrganizacionalDocumento2 páginasIdeas de Negocio Cultura OrganizacionalJuan BeltranAún no hay calificaciones
- Practica N°14 Subgrupo eDocumento12 páginasPractica N°14 Subgrupo ehaquilesAún no hay calificaciones
- La Adaptación de Los Organismos VivosDocumento1 páginaLa Adaptación de Los Organismos Vivoskarina nieva jorgeAún no hay calificaciones
- Trabajo Colaborativo Costos y PresupuestosDocumento11 páginasTrabajo Colaborativo Costos y Presupuestosjohn fredy monsalveAún no hay calificaciones
- Angelica DassDocumento7 páginasAngelica DassJosé luis RicardoAún no hay calificaciones
- Presentación-Inportancia de Las MatemáticasDocumento17 páginasPresentación-Inportancia de Las MatemáticasMarielos De LemusAún no hay calificaciones
- Errores Genios UnidosDocumento3 páginasErrores Genios UnidosAlvarez CH SarayAún no hay calificaciones
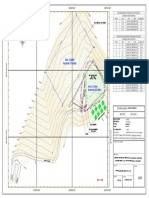
- Plano BotaderoDocumento1 páginaPlano BotaderoRoger ReyesAún no hay calificaciones
- Sesión 1 Imagen Profesional 3Documento29 páginasSesión 1 Imagen Profesional 3ArturoMiztliNavarroOlivares0% (1)
- Evaluación Diagnóstica de 5º Año de Ciencias NaturalesDocumento2 páginasEvaluación Diagnóstica de 5º Año de Ciencias NaturalesMARITZAAún no hay calificaciones
- 2019 2EjerciciosTransversalidadDocumento19 páginas2019 2EjerciciosTransversalidadUlises AgAún no hay calificaciones
- Anexo Criterios para La Revisión Del Circuito CerradoDocumento33 páginasAnexo Criterios para La Revisión Del Circuito CerradoguadalupecastillovianAún no hay calificaciones
- Informe 3 PotencialDocumento16 páginasInforme 3 PotencialRodrigo Lope FloresAún no hay calificaciones
- Guia de Elaboración de Informe de Laboratorio-2Documento5 páginasGuia de Elaboración de Informe de Laboratorio-2Cami ZambraniAún no hay calificaciones
- TI10 Gloatt Stepanian Martinez NichanDocumento8 páginasTI10 Gloatt Stepanian Martinez NichanNichan StepanianAún no hay calificaciones
- Libro - 2 - U5 - Razón de CambioDocumento13 páginasLibro - 2 - U5 - Razón de CambioGomez GoncalvesAún no hay calificaciones
- Taller de Signos de Puntuacion y Conectores Logicos.... 1docDocumento6 páginasTaller de Signos de Puntuacion y Conectores Logicos.... 1docfabio mejia0% (1)
- Cpp3 Estrella OliviaDocumento4 páginasCpp3 Estrella OliviaAndri Curi estrellaAún no hay calificaciones
- Evaluacion Final - Escenario 8 - PRIMER BLOQUE-CIENCIAS BASICAS - METODOS NUMERICOS - (GRUPO1) PDFDocumento9 páginasEvaluacion Final - Escenario 8 - PRIMER BLOQUE-CIENCIAS BASICAS - METODOS NUMERICOS - (GRUPO1) PDFhugo berdugoAún no hay calificaciones
- Taller EcuacionesDocumento4 páginasTaller EcuacionesDanyValeGuzmanAún no hay calificaciones
- Concepto de Ficha TecnicaDocumento3 páginasConcepto de Ficha TecnicaandresfeliecvAún no hay calificaciones