También podría gustarte
- Ejemplos de Ficha BibliográficaDocumento8 páginasEjemplos de Ficha Bibliográficaxolotl97% (562)
- Detección y compensación de irregularidades de inyecciónDe EverandDetección y compensación de irregularidades de inyecciónAún no hay calificaciones
- Manual 3D TRASAR Torres Puesta en MarchaDocumento68 páginasManual 3D TRASAR Torres Puesta en Marchacarlos calero100% (1)
- Manual de Programacion Torno CNC Con Fanuc Series 0iDocumento16 páginasManual de Programacion Torno CNC Con Fanuc Series 0iJubert Angelo Ramos Paredes100% (1)
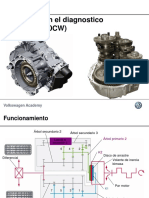
- Presentacion Diactica Cajas DSGDocumento19 páginasPresentacion Diactica Cajas DSGWilliam Yesid Albarracin Orozco100% (3)
- Mitsubishi L200 EMISIONESDocumento19 páginasMitsubishi L200 EMISIONESLeo RidriguezAún no hay calificaciones
- Boletines de PrekinderDocumento7 páginasBoletines de PrekinderBeltran Herrera Osneider De JesúsAún no hay calificaciones
- Programación de Máquinas de CNC Con Códigos G&M - TecnoEduDocumento17 páginasProgramación de Máquinas de CNC Con Códigos G&M - TecnoEduHector HectorAún no hay calificaciones
- Razones Trigonometricas de Angulos Multiplos PDFDocumento2 páginasRazones Trigonometricas de Angulos Multiplos PDFcamilaAún no hay calificaciones
- Caso Práctico Auditoria Administrativa PDFDocumento37 páginasCaso Práctico Auditoria Administrativa PDFCristopher HuariAún no hay calificaciones
- Programación de Máquinas de CNC Con Códigos GDocumento11 páginasProgramación de Máquinas de CNC Con Códigos GborllioAún no hay calificaciones
- CNC Manual G&M (3640)Documento16 páginasCNC Manual G&M (3640)Charly JimenezAún no hay calificaciones
- Minado Por Sublevel StopingDocumento27 páginasMinado Por Sublevel Stopingandres100% (1)
- Examen - 1MII - AutomatizaciónYControlAvanzado - 2018 - 2019 - Mayo - Resuelto v3Documento10 páginasExamen - 1MII - AutomatizaciónYControlAvanzado - 2018 - 2019 - Mayo - Resuelto v3marisaAún no hay calificaciones
- Modulador QAM64Documento10 páginasModulador QAM64jairo alfonsoAún no hay calificaciones
- Manual de Instalación, Funcionamiento y Prestaciones Del Kit BT LCD 5 de BicibateríaDocumento24 páginasManual de Instalación, Funcionamiento y Prestaciones Del Kit BT LCD 5 de BicibateríanandoAún no hay calificaciones
- Mvup - Dbca Con Submuestras1Documento13 páginasMvup - Dbca Con Submuestras1Nelly PallascoAún no hay calificaciones
- Especificaciones Del Código ISODocumento6 páginasEspecificaciones Del Código ISOMaría Antonela SchoenfeldAún no hay calificaciones
- Ejercicio RMRDocumento8 páginasEjercicio RMRAlvaro RecabarrenAún no hay calificaciones
- 1 ClasificadoraDocumento6 páginas1 ClasificadoraManuel CorreaAún no hay calificaciones
- Primer Examen Parcial de Procesos I - 2020 PDFDocumento3 páginasPrimer Examen Parcial de Procesos I - 2020 PDFJuan Alvarado LujanAún no hay calificaciones
- 5 Alimentacion - Pt.esDocumento161 páginas5 Alimentacion - Pt.esjuliandrpoAún no hay calificaciones
- LimitesDocumento20 páginasLimitesErick YauriAún no hay calificaciones
- Programación de Máquinas de CNC Con Códigos GDocumento14 páginasProgramación de Máquinas de CNC Con Códigos GKARLAAún no hay calificaciones
- Programación de Máquinas de CNC Con Códigos GDocumento14 páginasProgramación de Máquinas de CNC Con Códigos GKARLAAún no hay calificaciones
- S24.210.006590x.001.10 Hoja de Datos MGIxDocumento8 páginasS24.210.006590x.001.10 Hoja de Datos MGIxAlfonso Herrera MartinAún no hay calificaciones
- Moto Bomb 1013 GAS Chasis Largo V11.0Documento2 páginasMoto Bomb 1013 GAS Chasis Largo V11.0pucci.mauro.lucianoAún no hay calificaciones
- Código G - Grupo CDocumento3 páginasCódigo G - Grupo CDavid CallireAún no hay calificaciones
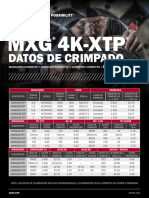
- Tablas de Crimpado MXG GatesDocumento1 páginaTablas de Crimpado MXG Gatesmiguel.angel.garcia.011295Aún no hay calificaciones
- GyroDocumento16 páginasGyrobachunguitaAún no hay calificaciones
- 2-Enzimas de RestriccionDocumento20 páginas2-Enzimas de RestriccionManuela TejadaAún no hay calificaciones
- Manual Elaborado Porduvan1Documento10 páginasManual Elaborado Porduvan1Duvan MartinezAún no hay calificaciones
- Kn128bes GDocumento68 páginasKn128bes GnuncafunaescolaAún no hay calificaciones
- Ttzmc074-Procedimiento Inspección Cojinete de Empuje Turbina.Documento14 páginasTtzmc074-Procedimiento Inspección Cojinete de Empuje Turbina.Selene Julio CastillaAún no hay calificaciones
- GGT - Dt-pdr-003 - Distancia Mínima de Separacion VehicularDocumento1 páginaGGT - Dt-pdr-003 - Distancia Mínima de Separacion VehicularArmando Saldaña QuispeAún no hay calificaciones
- Moto Bomba 1013 GAS Chasis Corto V11.0Documento2 páginasMoto Bomba 1013 GAS Chasis Corto V11.0pucci.mauro.lucianoAún no hay calificaciones
- Comportamiento Friccional de Cojinetes de Trapiche Lubricados Con Grasa Lisan 3MDocumento6 páginasComportamiento Friccional de Cojinetes de Trapiche Lubricados Con Grasa Lisan 3MRuben Omar QuirogaAún no hay calificaciones
- CAPITULO 5 Pruebas de Diagnostico.Documento49 páginasCAPITULO 5 Pruebas de Diagnostico.elyuyaAún no hay calificaciones
- TTGI-F-033 Inspección Preoperacional de Grúa Hidraulica Sobre Llanta Rev. 3Documento1 páginaTTGI-F-033 Inspección Preoperacional de Grúa Hidraulica Sobre Llanta Rev. 3Hugo Andres Quiroga SanchezAún no hay calificaciones
- Procedimiento Unitarios en La Mina Cerro LindoDocumento27 páginasProcedimiento Unitarios en La Mina Cerro LindoAnonymous UCfei8Aún no hay calificaciones
- Bgd152-155 Viscosimetro Digital - En.esDocumento9 páginasBgd152-155 Viscosimetro Digital - En.esShakty IglesiasAún no hay calificaciones
- Codigos de CNCDocumento4 páginasCodigos de CNCsars100% (1)
- Calculo BoquillasDocumento21 páginasCalculo BoquillasJorge LemusAún no hay calificaciones
- Ryb MGR2 GTS Ej 72 PR 003 R3Documento16 páginasRyb MGR2 GTS Ej 72 PR 003 R3jensdcvAún no hay calificaciones
- Condición Operacional CAEXDocumento2 páginasCondición Operacional CAEXAlejandro Andres Muñoz MenaAún no hay calificaciones
- Evasor de ObstaculosDocumento20 páginasEvasor de Obstaculosmabeunica20038548100% (1)
- Fundamentacion Codigos G Y M HNC 21TDocumento8 páginasFundamentacion Codigos G Y M HNC 21TDIEGO ARMANDO VANEGAS DUQUEAún no hay calificaciones
- Informe Tecnico Balanceo y Mantto ExtractorDocumento8 páginasInforme Tecnico Balanceo y Mantto Extractorluis EscobedoAún no hay calificaciones
- Hoja de Toma de Datos AGROGASIL - 093119Documento1 páginaHoja de Toma de Datos AGROGASIL - 093119ABC MATERIALESAún no hay calificaciones
- Codigos GyMDocumento4 páginasCodigos GyMMario LópezAún no hay calificaciones
- Manual CaptadorDocumento8 páginasManual CaptadorPUENTE ARANDAAún no hay calificaciones
- Plantilla Alumno - UT3-A1. Desmontaje, Verificación y Montaje de Cajas de Cambios ManualesDocumento5 páginasPlantilla Alumno - UT3-A1. Desmontaje, Verificación y Montaje de Cajas de Cambios Manualeslil hachiAún no hay calificaciones
- Calidad de Las Mediciones R RDocumento41 páginasCalidad de Las Mediciones R RJohanna GutierrezAún no hay calificaciones
- Apuntes de Obd IIDocumento103 páginasApuntes de Obd IIJosue Arias100% (1)
- Minidiccionario de G y MDocumento10 páginasMinidiccionario de G y MBruno DiazAún no hay calificaciones
- Control Numérico ComputarizadoDocumento11 páginasControl Numérico ComputarizadoAlejandra LimaAún no hay calificaciones
- PTAleas 31V0FDocumento12 páginasPTAleas 31V0FFlia Nunez1229Aún no hay calificaciones
- Exposision de TrasmisionesDocumento3 páginasExposision de TrasmisionesVido PonceAún no hay calificaciones
- Para Principiantes - Sistemas De Billar Tres Bandas - Parte 2: Para Principiantes, #2De EverandPara Principiantes - Sistemas De Billar Tres Bandas - Parte 2: Para Principiantes, #2Aún no hay calificaciones
- Copia de Violencia IntrafamiliarDocumento15 páginasCopia de Violencia IntrafamiliardannvelizcadenaAún no hay calificaciones
- Modelo Informe Abordaje ComunitarioDocumento9 páginasModelo Informe Abordaje ComunitariopaolaAún no hay calificaciones
- Cambio ClimaticoDocumento4 páginasCambio ClimaticoWesly Delgado ParedesAún no hay calificaciones
- Etica e InformáticaDocumento3 páginasEtica e InformáticatrabajosebpAún no hay calificaciones
- User Guide DotfuscatorDocumento50 páginasUser Guide Dotfuscatorciberdave2001Aún no hay calificaciones
- Mtto Ups PDFDocumento31 páginasMtto Ups PDFJuan Carlos HerreraAún no hay calificaciones
- Trabajo Final 1 Carabali-FilianDocumento228 páginasTrabajo Final 1 Carabali-FilianJanyCrisCarabalíAún no hay calificaciones
- Exp. 705-2020 - 08 ENE 2020 - Casos de Fiscal CÓRDOVA ALCÁNTARA Ante ODCI Lima. LectorDocumento10 páginasExp. 705-2020 - 08 ENE 2020 - Casos de Fiscal CÓRDOVA ALCÁNTARA Ante ODCI Lima. LectorDylan Ezequiel López EncarnaciónAún no hay calificaciones
- Diario Reflexivo Geovanna Melissa Vargas SoleraDocumento10 páginasDiario Reflexivo Geovanna Melissa Vargas SolerananaAún no hay calificaciones
- FIcha Tecnica Capacitación EppDocumento4 páginasFIcha Tecnica Capacitación EppKaren Stefania PACHON CORTESAún no hay calificaciones
- 14 Taller SesionesDocumento12 páginas14 Taller SesionesIrmaStefanyCoronadoCajusolAún no hay calificaciones
- Capítulo 11.4 - GalvánDocumento9 páginasCapítulo 11.4 - GalvánJoel HerraddaAún no hay calificaciones
- Le Breton, D. Introducción y Capítulo 1 La Incisión en La Cerne Marcas y Dolores para ExistirDocumento68 páginasLe Breton, D. Introducción y Capítulo 1 La Incisión en La Cerne Marcas y Dolores para Existircbc materiasAún no hay calificaciones
- Quiz 1Documento19 páginasQuiz 1Angie BuitragoAún no hay calificaciones
- Formato Tarea 6. Estrategia Pni. Unidad IIDocumento1 páginaFormato Tarea 6. Estrategia Pni. Unidad IIIvan MirabaAún no hay calificaciones
- Bienes Obligaciones ContratosDocumento140 páginasBienes Obligaciones ContratosjuanAún no hay calificaciones
- El Sujeto MoralDocumento3 páginasEl Sujeto MoralIsis Melissa Gordillo HernandezAún no hay calificaciones
- La Bibcicleta de Sumji CastDocumento5 páginasLa Bibcicleta de Sumji CastgrecsrosesAún no hay calificaciones
- ColaborativoDocumento1 páginaColaborativoAndres PerezAún no hay calificaciones
- Determinación Del Factor Topográfico Ls en Los Modelos Rusle Y Rusle3D Mediante El Sig SextanteDocumento8 páginasDeterminación Del Factor Topográfico Ls en Los Modelos Rusle Y Rusle3D Mediante El Sig SextanteSkill DeadAún no hay calificaciones
- Arts and Craft y Art NoveauDocumento3 páginasArts and Craft y Art NoveauCristina FresnedaAún no hay calificaciones
- Triptico OrientacionDocumento2 páginasTriptico OrientacionjudiAún no hay calificaciones
- Taller-1-PREGUNTA-GUIA 28658 0Documento3 páginasTaller-1-PREGUNTA-GUIA 28658 0Josesin BonillaAún no hay calificaciones
- Monografía - 'La Lotería en Babilonia'Documento4 páginasMonografía - 'La Lotería en Babilonia'TinchenkoAún no hay calificaciones
- Fichas Tecnicas de Tipos de VidriosDocumento8 páginasFichas Tecnicas de Tipos de VidriosYerson C. JoaquinAún no hay calificaciones
- Sesión Integradora 3Documento12 páginasSesión Integradora 3Helen Javier HuaytaAún no hay calificaciones
- Hemiparcial - Revisión Del IntentoDocumento5 páginasHemiparcial - Revisión Del IntentoCami LissAún no hay calificaciones