También podría gustarte
- Mantenimiento preventivo de sistemas de automatización industrial. ELEM0311De EverandMantenimiento preventivo de sistemas de automatización industrial. ELEM0311Calificación: 4.5 de 5 estrellas4.5/5 (2)
- 100 circuitos de shields para arduino (español)De Everand100 circuitos de shields para arduino (español)Calificación: 3.5 de 5 estrellas3.5/5 (3)
- UF2246 - Reparación de pequeños electrodomésticos y herramientas eléctricasDe EverandUF2246 - Reparación de pequeños electrodomésticos y herramientas eléctricasCalificación: 2.5 de 5 estrellas2.5/5 (3)
- Mantenimiento del sistema de alumbrado y señalización. TMVG0209De EverandMantenimiento del sistema de alumbrado y señalización. TMVG0209Aún no hay calificaciones
- UF1670 - Reparación de equipos mecánicos y eléctricos de plantas de tratamiento de agua y plantas depuradorasDe EverandUF1670 - Reparación de equipos mecánicos y eléctricos de plantas de tratamiento de agua y plantas depuradorasCalificación: 5 de 5 estrellas5/5 (1)
- Instrumentación y control en instalaciones de proceso, energía y servicios auxiliares. QUIE0108De EverandInstrumentación y control en instalaciones de proceso, energía y servicios auxiliares. QUIE0108Calificación: 4.5 de 5 estrellas4.5/5 (8)
- ListadoRenta Joven InscritosDocumento5175 páginasListadoRenta Joven InscritosYo Emprendo AyudasColombia50% (2)
- Señal AnalogicaDocumento5 páginasSeñal AnalogicaWendyCondorcetJimenez100% (1)
- Mantenimiento y reparación de instalaciones de antenas en edificios. ELES0108De EverandMantenimiento y reparación de instalaciones de antenas en edificios. ELES0108Aún no hay calificaciones
- Mantenimiento y reparación de instalaciones de telefonía y comunicación. ELES0108De EverandMantenimiento y reparación de instalaciones de telefonía y comunicación. ELES0108Aún no hay calificaciones
- Mantenimiento de redes eléctricas aéreas de alta tensión. ELEE0209De EverandMantenimiento de redes eléctricas aéreas de alta tensión. ELEE0209Aún no hay calificaciones
- Anteproyecto Plan de EmergenciasDocumento10 páginasAnteproyecto Plan de EmergenciasGerman OlguinAún no hay calificaciones
- Mantenimiento de redes eléctricas aéreas de baja tensión. ELEE0109De EverandMantenimiento de redes eléctricas aéreas de baja tensión. ELEE0109Aún no hay calificaciones
- PRACTICA No 2 Control de Nivel INSTRUDocumento10 páginasPRACTICA No 2 Control de Nivel INSTRUMariela Lopez BonifazAún no hay calificaciones
- Trabajo Lazo CerradoDocumento16 páginasTrabajo Lazo CerradochicotonyxdAún no hay calificaciones
- Prueba Inicial 3º Eso TecnologíaDocumento6 páginasPrueba Inicial 3º Eso TecnologíagatoyetiAún no hay calificaciones
- Cuestionario Instrumentación Industrial y RespuestasDocumento4 páginasCuestionario Instrumentación Industrial y Respuestasleonardo manosalvaAún no hay calificaciones
- Unidad 2 INSTRUMENTACION Y CONTROLDocumento51 páginasUnidad 2 INSTRUMENTACION Y CONTROLAnderson TorresAún no hay calificaciones
- Tarea 06 TransmisoresDocumento5 páginasTarea 06 TransmisoresLeo AlcantaraAún no hay calificaciones
- Apuntes Clases Avionica Tema 2 - 6) RadioaltímetroDocumento4 páginasApuntes Clases Avionica Tema 2 - 6) RadioaltímetromanuelAún no hay calificaciones
- Laboratorio 2 - Sensores de DistanciaDocumento12 páginasLaboratorio 2 - Sensores de DistanciaHarol AngaritaAún no hay calificaciones
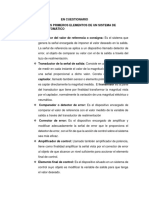
- CUESTIONARIODocumento10 páginasCUESTIONARIOVictor Manuel PAún no hay calificaciones
- Informe Del ProyectoDocumento17 páginasInforme Del ProyectoKendrick TeodorAún no hay calificaciones
- Diagrama PDocumento11 páginasDiagrama Pvoleta castilloAún no hay calificaciones
- Informe Sistemas de Control 4Documento15 páginasInforme Sistemas de Control 4Gamer AllianceAún no hay calificaciones
- Cuestionario 3Documento7 páginasCuestionario 3Eduardo Barrita GarciaAún no hay calificaciones
- Ejercicios Examen 1Documento9 páginasEjercicios Examen 1Gisela Ramirez LopezAún no hay calificaciones
- Práctica 1 Sensor UltrasónicoDocumento5 páginasPráctica 1 Sensor UltrasónicoErik De Jesús Ramirez De La CruzAún no hay calificaciones
- PROYECTO Sensor de Ultrasonido (Piezoeléctrico)Documento4 páginasPROYECTO Sensor de Ultrasonido (Piezoeléctrico)gabriela davalosAún no hay calificaciones
- INSTRUMENTACIÒNDocumento41 páginasINSTRUMENTACIÒNRikarudo ViruaAún no hay calificaciones
- Lazo-Cerrado y AbiertoDocumento7 páginasLazo-Cerrado y AbiertoDiana VillaAún no hay calificaciones
- Proyecto Medidor de NivelDocumento13 páginasProyecto Medidor de NivelGiovanni QCAún no hay calificaciones
- Componentes Básicos de Un Sistema de ControlDocumento14 páginasComponentes Básicos de Un Sistema de Controlluis9725Aún no hay calificaciones
- Práctica 6y9 SensoresDocumento10 páginasPráctica 6y9 SensoresJoshua MadoraAún no hay calificaciones
- Aporte - Elementos y Tipo de Lazos de ControlDocumento4 páginasAporte - Elementos y Tipo de Lazos de ControlCarlos Alberto Ramírez RestrepoAún no hay calificaciones
- Yoel Jenez Magaña Instrumentación IndustrialDocumento3 páginasYoel Jenez Magaña Instrumentación IndustrialYoel JenezAún no hay calificaciones
- Ultrasonido 1Documento6 páginasUltrasonido 1navarromelendezjeshua128Aún no hay calificaciones
- Bloque 4 Sistemas Automáticos de ControlDocumento9 páginasBloque 4 Sistemas Automáticos de ControlJavier TecnologíaAún no hay calificaciones
- Instituto Politécnico Nacionalunidad Profesional Interdisciplinaria de BiotecnologíaDocumento26 páginasInstituto Politécnico Nacionalunidad Profesional Interdisciplinaria de BiotecnologíaEnrique MoralesAún no hay calificaciones
- Totalizador Con Sensor UltrasonicoDocumento7 páginasTotalizador Con Sensor UltrasonicoDavid ManuelAún no hay calificaciones
- Practica 1Documento8 páginasPractica 1Martin TreviñoAún no hay calificaciones
- Sensor UltrasonicoDocumento5 páginasSensor UltrasonicoSantiago NavarreteAún no hay calificaciones
- Introducción A Los Sistemas de Control DigitalDocumento2 páginasIntroducción A Los Sistemas de Control DigitalLaura PulidoAún no hay calificaciones
- Elementos de ControlDocumento4 páginasElementos de ControlOdet Camion 1Aún no hay calificaciones
- Examen Parcial (1) - 1Documento6 páginasExamen Parcial (1) - 1Jhon Olsen Liffley IsaacAún no hay calificaciones
- Capitulo 6 - 11Documento226 páginasCapitulo 6 - 11Jesús Zacarías ZapataAún no hay calificaciones
- Instrumentación Industrial-11-20Documento10 páginasInstrumentación Industrial-11-20Paul RojasAún no hay calificaciones
- Chipugsi Anthony - Fundamentos Basicos de InstrumentacionDocumento16 páginasChipugsi Anthony - Fundamentos Basicos de InstrumentacionjuanAún no hay calificaciones
- Chipugsi Anthony - Fundamentos Basicos de InstrumentacionDocumento16 páginasChipugsi Anthony - Fundamentos Basicos de InstrumentacionjuanAún no hay calificaciones
- Lab Ing Control - Informe 01Documento23 páginasLab Ing Control - Informe 01Juan Jose Yagua HuamayalliAún no hay calificaciones
- Unidad 1 Objetivos de La InstrumentaciónDocumento15 páginasUnidad 1 Objetivos de La InstrumentaciónLuisAún no hay calificaciones
- INFORMEDocumento10 páginasINFORMEJohel GualavisiAún no hay calificaciones
- Tutorial Sensor de Flujo de AguaDocumento10 páginasTutorial Sensor de Flujo de Aguadom45Aún no hay calificaciones
- Instrumentación Electrónica ClasesDocumento39 páginasInstrumentación Electrónica ClasesNetonu NunezAún no hay calificaciones
- Practica 1Documento15 páginasPractica 1Charly BautistaAún no hay calificaciones
- 10 InstrumentacionDocumento40 páginas10 InstrumentacionRox LeonidesAún no hay calificaciones
- Informe Proyecto POODocumento7 páginasInforme Proyecto POOElian Andres Diaz VargasAún no hay calificaciones
- Sensores y TransductoresDocumento28 páginasSensores y TransductoresEduardo Lara Pablos0% (1)
- Práctica Control DigitalDocumento47 páginasPráctica Control DigitalMARCO ANTONIOAún no hay calificaciones
- Cuestionario Semana 9Documento4 páginasCuestionario Semana 9AlexAún no hay calificaciones
- Curso de Arduino 3Documento21 páginasCurso de Arduino 3Edwin David Tamayo AlzateAún no hay calificaciones
- Sensor de Caudal YFDocumento11 páginasSensor de Caudal YFDarling Jero MarkAún no hay calificaciones
- TPS InformeDocumento13 páginasTPS InformeMatias AyaviriAún no hay calificaciones
- Desempeño de Síntesis 1: Carrera Fecha Materia Docente Alumno: Nota DefinitivaDocumento1 páginaDesempeño de Síntesis 1: Carrera Fecha Materia Docente Alumno: Nota DefinitivaNahuel FarfanAún no hay calificaciones
- Parcial 1 ElectrónicaDocumento1 páginaParcial 1 ElectrónicaNahuel FarfanAún no hay calificaciones
- ElectronicaDocumento3 páginasElectronicaNahuel FarfanAún no hay calificaciones
- Actividad de La Clase 2Documento6 páginasActividad de La Clase 2Nahuel FarfanAún no hay calificaciones
- Clase 7 AM 1Documento14 páginasClase 7 AM 1Nahuel FarfanAún no hay calificaciones
- Tecnicas y Digitales (Clase 8)Documento3 páginasTecnicas y Digitales (Clase 8)Nahuel FarfanAún no hay calificaciones
- Diseño Red WiFi - Gaston CentenoDocumento18 páginasDiseño Red WiFi - Gaston CentenoNahuel FarfanAún no hay calificaciones
- Clase 3 AM 1Documento17 páginasClase 3 AM 1Nahuel FarfanAún no hay calificaciones
- Final de Técnicas Digitales 2Documento2 páginasFinal de Técnicas Digitales 2Nahuel FarfanAún no hay calificaciones
- SRI - Clase 02Documento16 páginasSRI - Clase 02Nahuel FarfanAún no hay calificaciones
- Clase 5 AM 1Documento15 páginasClase 5 AM 1Nahuel FarfanAún no hay calificaciones
- Técnicas Digitales 2 - TEL - Alumnos LibresDocumento4 páginasTécnicas Digitales 2 - TEL - Alumnos LibresNahuel FarfanAún no hay calificaciones
- Practico 2Documento1 páginaPractico 2Nahuel FarfanAún no hay calificaciones
- Parcial 1Documento4 páginasParcial 1Nahuel FarfanAún no hay calificaciones
- ReadmeDocumento1 páginaReadmeNahuel FarfanAún no hay calificaciones
- Tipo ParcialDocumento1 páginaTipo ParcialNahuel FarfanAún no hay calificaciones
- Clase 6Documento16 páginasClase 6Nahuel FarfanAún no hay calificaciones
- Clase 6Documento16 páginasClase 6Nahuel FarfanAún no hay calificaciones
- RSC1 Clase 5 - Conmutación EthernetDocumento11 páginasRSC1 Clase 5 - Conmutación EthernetNahuel FarfanAún no hay calificaciones
- Clase 10Documento16 páginasClase 10Nahuel FarfanAún no hay calificaciones
- ReadmeDocumento1 páginaReadmeNahuel FarfanAún no hay calificaciones
- Criterios A Evaluar Excelente Notable Bueno Suficiente Insuficiente Ind Puntos RetroalimentaciónDocumento2 páginasCriterios A Evaluar Excelente Notable Bueno Suficiente Insuficiente Ind Puntos RetroalimentaciónJose LuisAún no hay calificaciones
- Emmsa LP Edi Agua Fria CalienteDocumento56 páginasEmmsa LP Edi Agua Fria CalienteMiguel GarciaAún no hay calificaciones
- Carmen Alvarez: Rmu: 01510 90-07-26 XAXX-010101 135 CFEDocumento2 páginasCarmen Alvarez: Rmu: 01510 90-07-26 XAXX-010101 135 CFEJorge RamírezAún no hay calificaciones
- Capitulo 09Documento27 páginasCapitulo 09Gian Karloo ApumaytaAún no hay calificaciones
- Cuestionario de InformaticaDocumento4 páginasCuestionario de InformaticaAni WisAún no hay calificaciones
- 2 Convocatoria A Junta General Extraordinaria de La Compania de Transportes de Carga Liviana El Arriendo SDocumento2 páginas2 Convocatoria A Junta General Extraordinaria de La Compania de Transportes de Carga Liviana El Arriendo SAndrés Albornoz MuñozAún no hay calificaciones
- Ejercicios ElectronicaDocumento25 páginasEjercicios ElectronicaManu Sanchez VilladaAún no hay calificaciones
- Actividad A Cargo de La Docente en Linea 3Documento3 páginasActividad A Cargo de La Docente en Linea 3Josue Ramirez VelezAún no hay calificaciones
- Codigo Rural de Entre RiosDocumento67 páginasCodigo Rural de Entre RiosJosé María MonzónAún no hay calificaciones
- Epm InstallDocumento328 páginasEpm InstallwnowakAún no hay calificaciones
- TAL011 Pauta Desarrollo Portafolio de Evidencias LaboralesDocumento2 páginasTAL011 Pauta Desarrollo Portafolio de Evidencias LaboralesVictoria Lucero HerreraAún no hay calificaciones
- Estado de CuentaDocumento3 páginasEstado de CuentaCarlos JavierAún no hay calificaciones
- Clasificacion de Robots Segun Su UsoDocumento6 páginasClasificacion de Robots Segun Su Usojuan pablo dominguez arellanoAún no hay calificaciones
- Claves para Pensar La MarginaciónDocumento15 páginasClaves para Pensar La MarginaciónLiz SantacruzAún no hay calificaciones
- Alm - Asset Liability Management Gestión de Activos Y PasivosDocumento11 páginasAlm - Asset Liability Management Gestión de Activos Y PasivosDante Junior MogollonAún no hay calificaciones
- Informe Proyecto IntercicloDocumento4 páginasInforme Proyecto IntercicloCarlos AlvarezAún no hay calificaciones
- Ciclo de Vida Del ProductoDocumento3 páginasCiclo de Vida Del ProductoabdisalomonAún no hay calificaciones
- Sentencia Reticencia en Contrato de SegurosDocumento6 páginasSentencia Reticencia en Contrato de SegurosMaria Camila Grisales toroAún no hay calificaciones
- Transporte y Almacenamiento de Energía TérmicaDocumento31 páginasTransporte y Almacenamiento de Energía TérmicaJonatan Garcia0% (1)
- Administracion de Ventas Tarea 6Documento6 páginasAdministracion de Ventas Tarea 6Fernando GuerreroAún no hay calificaciones
- Tesis de CriticidadDocumento74 páginasTesis de CriticidadCristian Gonzalo Gordillo Daza100% (1)
- Pcil Proyecto TruchasDocumento18 páginasPcil Proyecto TruchasJose PancorboAún no hay calificaciones
- Programa de Mantenimiento de VehiculosDocumento7 páginasPrograma de Mantenimiento de VehiculosMaria Rosa Fernandez JaramilloAún no hay calificaciones
- Crisis de La Leche Pura Vida PDFDocumento9 páginasCrisis de La Leche Pura Vida PDFDaniel CabelloAún no hay calificaciones
- Prog Unidad 04Documento47 páginasProg Unidad 04uombatAún no hay calificaciones
- Tarea 8 AuditoriaDocumento7 páginasTarea 8 AuditoriaManuel zoriano0% (1)
- Ee524 Exfi 20161Documento1 páginaEe524 Exfi 20161Armando CajahuaringaAún no hay calificaciones