También podría gustarte
- EM M2 A5 Luis CruzDocumento6 páginasEM M2 A5 Luis CruzLuis EduardoAún no hay calificaciones
- Matematica I Asignacion 2Documento70 páginasMatematica I Asignacion 2Dorkis RamirezAún no hay calificaciones
- Proyecto Integredor Parte 3Documento75 páginasProyecto Integredor Parte 3RobertoyJuliaAún no hay calificaciones
- 146 LedierBustos Tarea1Documento13 páginas146 LedierBustos Tarea1Leidy Camila Contreras GarciaAún no hay calificaciones
- Capítulo 8 Geometría AnalíticaDocumento24 páginasCapítulo 8 Geometría AnalíticaTuromeo Foster WilkensAún no hay calificaciones
- Dokumen - Tips - Informe de Fisica N 2 UnmsmDocumento29 páginasDokumen - Tips - Informe de Fisica N 2 UnmsmJAIMEAún no hay calificaciones
- Sesion2 GeometriaTallerDocumento16 páginasSesion2 GeometriaTallerFelipe GallegosAún no hay calificaciones
- Trabajo de Unidad II Algebra SuperiorDocumento23 páginasTrabajo de Unidad II Algebra SuperiorERICK EDUARDO GONZALES CASTROAún no hay calificaciones
- Guía de Aprendizaje 07 PDFDocumento10 páginasGuía de Aprendizaje 07 PDFAnthony Fernandez HerreraAún no hay calificaciones
- CuadernilloTrigonometria 2017Documento39 páginasCuadernilloTrigonometria 2017NarcisoDelaVegaAún no hay calificaciones
- Práctica 3Documento7 páginasPráctica 3Keina SalinasAún no hay calificaciones
- Geometría AnalíticaDocumento34 páginasGeometría AnalíticaDenny InaudiAún no hay calificaciones
- Notas de Calculo VectorialDocumento77 páginasNotas de Calculo VectorialTomas MontealegreAún no hay calificaciones
- Cálculo Vectorial: Descripción y Gráficas de Los Cuerpos en 3DDocumento16 páginasCálculo Vectorial: Descripción y Gráficas de Los Cuerpos en 3Dedd villanewAún no hay calificaciones
- Investigacion de Aplicaciones de Las Ecuaciones DiferencialesDocumento19 páginasInvestigacion de Aplicaciones de Las Ecuaciones DiferencialesJUAN DIEGO DUEÑAS FLORESAún no hay calificaciones
- Calculo VectorialDocumento281 páginasCalculo VectorialSantiago CañizaresAún no hay calificaciones
- Visión estéreo por computadora: Explorando la percepción de profundidad en la visión por computadoraDe EverandVisión estéreo por computadora: Explorando la percepción de profundidad en la visión por computadoraAún no hay calificaciones
- PrimitivasDocumento8 páginasPrimitivasSaul CamposAún no hay calificaciones
- Unidad 2 Lugares Geométricos en El Plano 2 - 1Documento7 páginasUnidad 2 Lugares Geométricos en El Plano 2 - 1Eduin Fernando Hurtado CanoAún no hay calificaciones
- Raices Ecuaciones-Métodos Cerrados P3Documento31 páginasRaices Ecuaciones-Métodos Cerrados P3SCAún no hay calificaciones
- Putación Gráfica (Rectas)Documento13 páginasPutación Gráfica (Rectas)Jan Pierre Carranza SerrantesAún no hay calificaciones
- Tarea 2 - Sistemas de Ecuaciones Lineales, Rectas, Planos y Espacios VectorialesDocumento16 páginasTarea 2 - Sistemas de Ecuaciones Lineales, Rectas, Planos y Espacios Vectorialesyira canteroAún no hay calificaciones
- Preguntas Calculo LeitholdDocumento17 páginasPreguntas Calculo LeitholdLalo GarzaAún no hay calificaciones
- Guía Práctica de Laboratorio N°3Documento5 páginasGuía Práctica de Laboratorio N°3Alex BarrientosAún no hay calificaciones
- Unidad 2 Lugares Geométricos en El Plano 2 - 1Documento8 páginasUnidad 2 Lugares Geométricos en El Plano 2 - 1Carlos Augusto A. A.Aún no hay calificaciones
- Introducción a la geometría analíticaDe EverandIntroducción a la geometría analíticaCalificación: 4 de 5 estrellas4/5 (1)
- Calculo VectorialDocumento27 páginasCalculo Vectorialedd villanew100% (1)
- Guía Nº01 - Graficas de Desigualdades en Xy y Ecuaciones en XyzDocumento2 páginasGuía Nº01 - Graficas de Desigualdades en Xy y Ecuaciones en XyzKevin Burgos AscateAún no hay calificaciones
- AL 3.2 Planos y Rectas en R3Documento6 páginasAL 3.2 Planos y Rectas en R3EMILIANO HERNANDEZ GONZALEZAún no hay calificaciones
- Introduccion Al Algebra Lineal NumericaDocumento151 páginasIntroduccion Al Algebra Lineal NumericaOmarAún no hay calificaciones
- Matematica 6ºDocumento29 páginasMatematica 6º5to C de secundaria Juan manuelAún no hay calificaciones
- GT - Álgebra y Geometría Analítica - VC2 CorregidoDocumento48 páginasGT - Álgebra y Geometría Analítica - VC2 CorregidoJonathan Velasquez carbajalAún no hay calificaciones
- Trabajo de FotogrametriaDocumento9 páginasTrabajo de FotogrametriaChards Díaz HerreraAún no hay calificaciones
- Algoritmos Superficies 3D (Aux0)Documento12 páginasAlgoritmos Superficies 3D (Aux0)alonso alvarez olivoAún no hay calificaciones
- Ecuaciones Empiricas ImformeDocumento8 páginasEcuaciones Empiricas ImformeJheremy DavilaAún no hay calificaciones
- No 2 Vector de PosicionDocumento15 páginasNo 2 Vector de PosicionCecilia Reynosa100% (1)
- Métodos de Solución de EcuacionesDocumento15 páginasMétodos de Solución de Ecuacionesantonio rodriguezAún no hay calificaciones
- Modelos Cosmológicos Alternativos Al de Friedmann PDFDocumento37 páginasModelos Cosmológicos Alternativos Al de Friedmann PDFJuan David García FuentesAún no hay calificaciones
- INTENSIVO Guia de Estudio 1 (Geometria en El Espacio Euclidiano y Funciones de Varias Variables)Documento31 páginasINTENSIVO Guia de Estudio 1 (Geometria en El Espacio Euclidiano y Funciones de Varias Variables)MariaEugenia UMAún no hay calificaciones
- Trabajo de Investigación de Curvas Planas, Ecuaciones Paramétricas y Coordenadas Polares, Ecuaciones Paramétricas de Algunas CurvasDocumento7 páginasTrabajo de Investigación de Curvas Planas, Ecuaciones Paramétricas y Coordenadas Polares, Ecuaciones Paramétricas de Algunas CurvasisabelAún no hay calificaciones
- Geometria AnaliticaDocumento24 páginasGeometria AnaliticaThaiz SánchezAún no hay calificaciones
- 1 Sistema CoordenadoDocumento17 páginas1 Sistema CoordenadorafvAún no hay calificaciones
- UNIDAD II DMpA N°07 CUARTO GRUPO2 PIURADocumento16 páginasUNIDAD II DMpA N°07 CUARTO GRUPO2 PIURAalex juniorAún no hay calificaciones
- Correccion A Las Imagenes Satelitales PDFDocumento10 páginasCorreccion A Las Imagenes Satelitales PDFJakelyne IrinaAún no hay calificaciones
- Calculo Tensorial GoicoleaDocumento35 páginasCalculo Tensorial GoicoleaCarlos CardenasAún no hay calificaciones
- AL 3.2 Planos y Rectas en R3 CAGLDocumento5 páginasAL 3.2 Planos y Rectas en R3 CAGLCarlos GarciaAún no hay calificaciones
- Informe Laboratorio 02 FisicaDocumento10 páginasInforme Laboratorio 02 FisicaJosé AimacañaAún no hay calificaciones
- Modelo de Regresion CuadraticaDocumento13 páginasModelo de Regresion CuadraticaCristian RamírezAún no hay calificaciones
- Geometria Analitica 2022Documento44 páginasGeometria Analitica 2022Galindo Acosta José de JesúsAún no hay calificaciones
- Sem 2 GraficasDocumento7 páginasSem 2 GraficasJunior FigueroaAún no hay calificaciones
- GEOMETRIADocumento41 páginasGEOMETRIAMónica Marcela Montiel GarcíaAún no hay calificaciones
- Calcular AreasDocumento15 páginasCalcular AreasshiroAún no hay calificaciones
- Libro de CónicasDocumento24 páginasLibro de CónicasEduardo MenaAún no hay calificaciones
- 5to Matemática tp2-2023 COLEGIO NACIONALDocumento14 páginas5to Matemática tp2-2023 COLEGIO NACIONALvqcxk5ddhdAún no hay calificaciones
- Sistemas CoordenadosDocumento6 páginasSistemas CoordenadosJonatan GilAún no hay calificaciones
- La ecuación general de segundo grado en dos y tres variablesDe EverandLa ecuación general de segundo grado en dos y tres variablesAún no hay calificaciones
- Solution of Mathisson-Papapetrou-Dixon equations: for spinning test particles in a Kerr metricDe EverandSolution of Mathisson-Papapetrou-Dixon equations: for spinning test particles in a Kerr metricAún no hay calificaciones
- Mapa Conceptual de Machine LearningDocumento2 páginasMapa Conceptual de Machine Learningpaul rodriguez lopezAún no hay calificaciones
- Jiva - Desarrollo de La Teleoperación de Robots Industriales y Colaborativos Mediante Técnicas Av...Documento85 páginasJiva - Desarrollo de La Teleoperación de Robots Industriales y Colaborativos Mediante Técnicas Av...paul rodriguez lopezAún no hay calificaciones
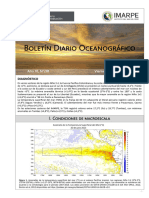
- Bdo 21-07-2023Documento5 páginasBdo 21-07-2023paul rodriguez lopezAún no hay calificaciones
- Sistema de Visión Artificial para El Reconocimiento y Manipulación de Objetos Utilizando Un Brazo RobotDocumento24 páginasSistema de Visión Artificial para El Reconocimiento y Manipulación de Objetos Utilizando Un Brazo Robotpaul rodriguez lopezAún no hay calificaciones
- Modulo de Vision Artificial Del Robot Humanoide HOAP3 Aplicacion Al Seguimiento de Objetivos MovilesDocumento76 páginasModulo de Vision Artificial Del Robot Humanoide HOAP3 Aplicacion Al Seguimiento de Objetivos Movilespaul rodriguez lopezAún no hay calificaciones
- Informática y Electrónica en La AgriculturaDocumento7 páginasInformática y Electrónica en La Agriculturapaul rodriguez lopezAún no hay calificaciones
- Guion Tutoria 3° y 4° Sem.18Documento4 páginasGuion Tutoria 3° y 4° Sem.18CELESTINA RIOS MOENAAún no hay calificaciones
- 2021 91d54 BolmineDocumento1 página2021 91d54 BolmineValentin VillegasAún no hay calificaciones
- Exp - 1 - y - 2 - 2019 (1) Juan Vilcazan HuaytaDocumento16 páginasExp - 1 - y - 2 - 2019 (1) Juan Vilcazan HuaytaVilcazan Huayta JuanAún no hay calificaciones
- CG-GS-SST-DIR-009 - V1 Estandar Segregacion-DelimitacionDocumento3 páginasCG-GS-SST-DIR-009 - V1 Estandar Segregacion-Delimitacioncamilo gonzalezAún no hay calificaciones
- Plan de Estudios ACTUAL 2020Documento1 páginaPlan de Estudios ACTUAL 2020leperdomooAún no hay calificaciones
- 2DO EXAMEN PARCIAL - Revisión Del IntentoDocumento3 páginas2DO EXAMEN PARCIAL - Revisión Del IntentoDennis FlowAún no hay calificaciones
- Formato Temario Metodologias de Desarrollo de SoftwareDocumento2 páginasFormato Temario Metodologias de Desarrollo de SoftwareMarlene TorresAún no hay calificaciones
- Informe XML CV de PersonasDocumento3 páginasInforme XML CV de PersonasWilson ZambranoAún no hay calificaciones
- Proceso Generativo Prácticas DialogicasDocumento29 páginasProceso Generativo Prácticas DialogicasJavier Labarthe CarraraAún no hay calificaciones
- Materiales CompuestosDocumento43 páginasMateriales Compuestos051202mjAún no hay calificaciones
- Herramientas de Power PointDocumento67 páginasHerramientas de Power PointGermanAún no hay calificaciones
- Proyecto Integrador EcogestionDocumento21 páginasProyecto Integrador EcogestionEdison Ruiz BuitrónAún no hay calificaciones
- Neuroeducación MusicalDocumento15 páginasNeuroeducación MusicalSofia JaraAún no hay calificaciones
- Informepractica Trabajo GrupalDocumento11 páginasInformepractica Trabajo GrupalMISHEL CAROLINA FRIAS CORELLAAún no hay calificaciones
- Tesis Tecnicas Grupales AprendizajeDocumento89 páginasTesis Tecnicas Grupales AprendizajejoalesmuAún no hay calificaciones
- BEC-R-A-05.10 Inspección Camión Pluma Rev.00Documento1 páginaBEC-R-A-05.10 Inspección Camión Pluma Rev.00macarena alvaradoAún no hay calificaciones
- Ficha de Caracterización Evaluación Del Desempeño.Documento2 páginasFicha de Caracterización Evaluación Del Desempeño.JOHAN MAURICIO CARDOZO REINOSOAún no hay calificaciones
- Actividad 4 ResilienciaDocumento3 páginasActividad 4 ResilienciaAlejandra AHAún no hay calificaciones
- Grupo 5 Pukara 1Documento1 páginaGrupo 5 Pukara 1Henrry MariacaAún no hay calificaciones
- Entrevista A Ricardo BadiniDocumento2 páginasEntrevista A Ricardo BadiniMario Tinta AroniAún no hay calificaciones
- Salas Carolina EA6Documento11 páginasSalas Carolina EA6Ca A SecasAún no hay calificaciones
- PsicometriaDocumento12 páginasPsicometriajulioAún no hay calificaciones
- Concreto ArmadoDocumento15 páginasConcreto ArmadoHilder Salazar CotrinaAún no hay calificaciones
- Informe-Hormigón Postensado 2Documento34 páginasInforme-Hormigón Postensado 2ElxjuanzhoOrmeño67% (3)
- Infaimon PDFDocumento30 páginasInfaimon PDFEva SuárezAún no hay calificaciones
- Taller Emprendimiento Zona de Confort Ajustado DJR 2. 1111docxDocumento9 páginasTaller Emprendimiento Zona de Confort Ajustado DJR 2. 1111docxNiikolas NiñoAún no hay calificaciones
- (Máquinas de Construcción (Construction Machines) ) Charles Lennie - Excavadoras-ABDO Publishing Company - ABDO Publishing - Abdo PDFDocumento26 páginas(Máquinas de Construcción (Construction Machines) ) Charles Lennie - Excavadoras-ABDO Publishing Company - ABDO Publishing - Abdo PDFJuliane FragaAún no hay calificaciones
- ConceptualizaciónDocumento16 páginasConceptualizaciónsteve795123Aún no hay calificaciones
- 4 - Teatro - El MonólogoDocumento2 páginas4 - Teatro - El MonólogoDV NMAún no hay calificaciones
- Amilcar Perez LópezDocumento3 páginasAmilcar Perez LópezPedroMadridAún no hay calificaciones