También podría gustarte
- LabVIEW: Entorno gráfico de programaciónDe EverandLabVIEW: Entorno gráfico de programaciónCalificación: 4 de 5 estrellas4/5 (4)
- Evolución de La Robótica PDFDocumento11 páginasEvolución de La Robótica PDFJavier LMAún no hay calificaciones
- Laboratorio 1Documento9 páginasLaboratorio 1Andree CrAún no hay calificaciones
- Elaboracion de Un Robot Bipedo de Caminado DinamicoDocumento115 páginasElaboracion de Un Robot Bipedo de Caminado DinamicoPedro Palencia100% (1)
- Robótica EvolutivaDocumento8 páginasRobótica EvolutivaDELMORE ORTIZ GAMALIELAún no hay calificaciones
- Clasificación de Los RobotsDocumento3 páginasClasificación de Los RobotsDavid Camilo MosqueraAún no hay calificaciones
- Ieee VelocistaDocumento6 páginasIeee VelocistaDiana MahechaAún no hay calificaciones
- U3 GRUPOS Brazo Robótico CappeliaSimDocumento2 páginasU3 GRUPOS Brazo Robótico CappeliaSimJOSE LUIS VILLACRES MOREJONAún no hay calificaciones
- La Evolución de La RobóticaDocumento3 páginasLa Evolución de La Robóticacarlosmartin_22Aún no hay calificaciones
- Ensayo RobóticaDocumento11 páginasEnsayo RobóticaErik Alejandro Melendez OlguínAún no hay calificaciones
- Estado Del Arte ManipulaciónDocumento6 páginasEstado Del Arte ManipulaciónFlabio Dario Mirelez DelgadoAún no hay calificaciones
- Proyecto de Tesis - Brazo RobóticoDocumento17 páginasProyecto de Tesis - Brazo RobóticoVíctor Barreto VásquezAún no hay calificaciones
- DiapostivasDocumento9 páginasDiapostivasjuan david dueñas vegaAún no hay calificaciones
- Informe RoboticaDocumento3 páginasInforme RoboticaAndres DonadoAún no hay calificaciones
- 5.1 Bobadilla JoséDocumento9 páginas5.1 Bobadilla JoséJosé BobadillaAún no hay calificaciones
- Propuesta de Prototipo de Robot Aspiradora de Bajo Costo y Alta Tecnología Aplicado A Procesos de Limpieza de Baja EscalaDocumento6 páginasPropuesta de Prototipo de Robot Aspiradora de Bajo Costo y Alta Tecnología Aplicado A Procesos de Limpieza de Baja EscalaJhonnySanchezAún no hay calificaciones
- Prototipos 1 37Documento37 páginasPrototipos 1 37Lord AlfonsoAún no hay calificaciones
- Estado Del ArteDocumento7 páginasEstado Del ArteasdadAún no hay calificaciones
- Diseno de Una Cabeza Robotica para El Estudio de P PDFDocumento8 páginasDiseno de Una Cabeza Robotica para El Estudio de P PDFPatricia RosasAún no hay calificaciones
- Tesina (Seguidor de Linea)Documento29 páginasTesina (Seguidor de Linea)Brandon Martinez33% (3)
- Definición de Robot IndustrialDocumento14 páginasDefinición de Robot IndustrialFernando Trejo Huaman100% (1)
- Implementaci On de Habilidades Culinarias en Un Humanoide NaoDocumento6 páginasImplementaci On de Habilidades Culinarias en Un Humanoide NaoMaryellen TapiaAún no hay calificaciones
- La RobóticaDocumento29 páginasLa RobóticaMariano BejarAún no hay calificaciones
- Estado Del ArteDocumento4 páginasEstado Del ArteFabian German RodriguezAún no hay calificaciones
- Origen de La RoboticaDocumento11 páginasOrigen de La RoboticaXavier RestrepoAún no hay calificaciones
- Clasificación Del Brazo RobóticoDocumento7 páginasClasificación Del Brazo RobóticoLenin Ismael Quizhpe CórdovaAún no hay calificaciones
- Reporte CiberfisicosDocumento35 páginasReporte CiberfisicosEduardo PozosAún no hay calificaciones
- Proyecto Robot LaberintoDocumento14 páginasProyecto Robot Laberintojose_suarez_suxeAún no hay calificaciones
- Pasos para Entregar Un ProyectoDocumento30 páginasPasos para Entregar Un ProyectoNilo0% (1)
- Robot PUMDocumento40 páginasRobot PUMJose LuisAún no hay calificaciones
- Tarea Wedo 1Documento4 páginasTarea Wedo 1MaribelGarciaAún no hay calificaciones
- Robotica Segundo Secundaria 2023Documento75 páginasRobotica Segundo Secundaria 2023Lucero Cabrera AguinagaAún no hay calificaciones
- Introducción Al Software Vrep.Documento23 páginasIntroducción Al Software Vrep.Josmell Alva AlcantaraAún no hay calificaciones
- Proyecto Robotica 1Documento7 páginasProyecto Robotica 1Mariuxi SierraAún no hay calificaciones
- Robotica ClasicaDocumento17 páginasRobotica ClasicaJorge LuisAún no hay calificaciones
- Modelado, Simulación y Control Del Robot para Cirugía Laparoscópica 'Lapbot'.Documento13 páginasModelado, Simulación y Control Del Robot para Cirugía Laparoscópica 'Lapbot'.Cesar Alejandro Gallegos CastilloAún no hay calificaciones
- Maqmin 23 14 Robótica en MineríaDocumento19 páginasMaqmin 23 14 Robótica en MineríaCRISTIAN ANTONIO PEREZ ATENCIAAún no hay calificaciones
- Angel MontalvoDocumento10 páginasAngel MontalvoangelAún no hay calificaciones
- Ensayo RoboticaDocumento7 páginasEnsayo Roboticacarlos tremoladaAún no hay calificaciones
- Actividad 3. Mapa ConceptualDocumento1 páginaActividad 3. Mapa ConceptualIsabel PechAún no hay calificaciones
- Tecnologia - 4 Periodo - Septimo - 2021Documento7 páginasTecnologia - 4 Periodo - Septimo - 2021oscarAún no hay calificaciones
- TAREA Fase 4Documento17 páginasTAREA Fase 4Jhon SuarezAún no hay calificaciones
- Mi Libro de Robotica Educativa PDFDocumento60 páginasMi Libro de Robotica Educativa PDFErnesto Vladimir Valdez100% (4)
- Giocondasn, Implementación Del AlgoritmoDocumento5 páginasGiocondasn, Implementación Del AlgoritmoVicente RodriguezAún no hay calificaciones
- Creacion de Rutinas para Robot Humanoide PDFDocumento28 páginasCreacion de Rutinas para Robot Humanoide PDFdenarira1404100% (1)
- Sophia La Robot PDFDocumento16 páginasSophia La Robot PDFS'antiago T'orresAún no hay calificaciones
- 50 Alberto Ibarra DomínguezDocumento204 páginas50 Alberto Ibarra DomínguezEdgar Guerrero100% (1)
- Actividad Eje 2 Gestion Del ConocimientoDocumento11 páginasActividad Eje 2 Gestion Del ConocimientoleonardoAún no hay calificaciones
- Conac YtDocumento1 páginaConac YtJorge Vilchis Reyes RetanaAún no hay calificaciones
- Programación Aplicada - Tema 3Documento21 páginasProgramación Aplicada - Tema 3Miguel MorontaAún no hay calificaciones
- Monografia Construccion de Brazo RoboticoDocumento10 páginasMonografia Construccion de Brazo RoboticoCarlos Quispealaya LazoAún no hay calificaciones
- Brazo RoboticoDocumento9 páginasBrazo Roboticorudy condoriAún no hay calificaciones
- Analisis Sistemático de Las Tendencias TecnológicasDocumento4 páginasAnalisis Sistemático de Las Tendencias TecnológicasAlejandro RojasAún no hay calificaciones
- Brazo RoboticoDocumento13 páginasBrazo RoboticoRoberto FiorilloAún no hay calificaciones
- Diseño y Control Estructural de Unrobot Bipedo EducativoDocumento9 páginasDiseño y Control Estructural de Unrobot Bipedo EducativoDiego Vera DiazAún no hay calificaciones
- Autor 2Documento6 páginasAutor 2Abril DiazAún no hay calificaciones
- Guía de Personas Con Robots Móviles Basado en La Interacción Humano-RobotDocumento122 páginasGuía de Personas Con Robots Móviles Basado en La Interacción Humano-RobotCristianMartinezGarciaAún no hay calificaciones
- Electro - Api de Control de Marionetas DigitalesDocumento8 páginasElectro - Api de Control de Marionetas DigitalesbibliotecaambulanteAún no hay calificaciones
- Articulo CientificoDocumento11 páginasArticulo CientificoGustavo MaradiagaAún no hay calificaciones
- Gestion Del Conocimiento Eje 2Documento11 páginasGestion Del Conocimiento Eje 2stefany caicedo pabonAún no hay calificaciones
- Material Didáctico 1Documento10 páginasMaterial Didáctico 1Mariana SantolínAún no hay calificaciones
- ELE24Documento10 páginasELE24André FreireAún no hay calificaciones
- Manual de Uso Heidi SQLDocumento24 páginasManual de Uso Heidi SQLJorge ArmandoAún no hay calificaciones
- Cudernillo N°1-Taller Informatica-3° A-B-C-D PDFDocumento5 páginasCudernillo N°1-Taller Informatica-3° A-B-C-D PDFCaro LopezAún no hay calificaciones
- Guide MatlabDocumento10 páginasGuide MatlabJhonatan PinzonAún no hay calificaciones
- cuestionariovFINAL SIGES 004Documento3 páginascuestionariovFINAL SIGES 004ManuelMCPAún no hay calificaciones
- Metodologias Desarrollo SoftwareDocumento117 páginasMetodologias Desarrollo SoftwareLuis JosAún no hay calificaciones
- Medidor ElectronicoDocumento12 páginasMedidor ElectronicoAlejandro Salas VásquezAún no hay calificaciones
- Hacer Clic - Carlos ScolariDocumento4 páginasHacer Clic - Carlos ScolariMiguel AnguloAún no hay calificaciones
- Gui de JavaDocumento3 páginasGui de JavaSaúl Vela100% (1)
- Carta Técnica CONTPAQ I NÓMINAS Versión 4.0Documento8 páginasCarta Técnica CONTPAQ I NÓMINAS Versión 4.0mac_cbAún no hay calificaciones
- La Interfaz Gráfica de UsuarioDocumento4 páginasLa Interfaz Gráfica de UsuarioJenny DonjuanAún no hay calificaciones
- 2 Subsis BBE - 1Documento50 páginas2 Subsis BBE - 1pedroAún no hay calificaciones
- Presentación N°1Documento43 páginasPresentación N°1Palacios M. CristianAún no hay calificaciones
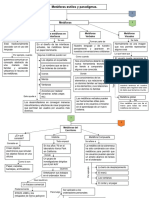
- Mapa Conceptual Metaforas, Estilos y ParadigmasDocumento6 páginasMapa Conceptual Metaforas, Estilos y ParadigmasAlex TrejoAún no hay calificaciones
- La Historia de Las Computadoras Personales Comenzó en Los Años 1970Documento20 páginasLa Historia de Las Computadoras Personales Comenzó en Los Años 1970Brandon E. NijAún no hay calificaciones
- Guia Rapida TramigoDocumento22 páginasGuia Rapida TramigoSergio Salinas100% (1)
- NDG Linux Unhatched - Material para Crear Curso - Urgente para MayoDocumento69 páginasNDG Linux Unhatched - Material para Crear Curso - Urgente para MayoJoshue ValladaresAún no hay calificaciones
- Qcad Es Un SoftDocumento2 páginasQcad Es Un Softjose NogueraAún no hay calificaciones
- Técnicas de Prueba Del Software - CuevaMartinezDocumento24 páginasTécnicas de Prueba Del Software - CuevaMartinezPao CuevaAún no hay calificaciones
- Sofware de Aplicacion - Grupo 4Documento29 páginasSofware de Aplicacion - Grupo 4Percy Espinoza VergaraAún no hay calificaciones
- Sos Lim FichatecDocumento2 páginasSos Lim FichatecCarlos Robles CastroAún no hay calificaciones
- Actividad 2 Analisis de SistemasDocumento15 páginasActividad 2 Analisis de Sistemasrafael nieto0% (1)
- MANUAL DE CAMoticsDocumento25 páginasMANUAL DE CAMoticsAlexander RinconAún no hay calificaciones
- Funciones de WindowsDocumento12 páginasFunciones de WindowsStuardo Chivalan CaalAún no hay calificaciones
- Sistema Operativo LINUXDocumento8 páginasSistema Operativo LINUXFrancelina Mendez75% (4)
- Manual Power Builder9 SybaseDocumento270 páginasManual Power Builder9 SybaseClaudia AristizábalAún no hay calificaciones
- Conectar Base de Datos Con Mysql Modificar, Borras Dar de AltaDocumento19 páginasConectar Base de Datos Con Mysql Modificar, Borras Dar de AltaJuan LopezAún no hay calificaciones
- El Sistema de Control OvationDocumento12 páginasEl Sistema de Control OvationisraelalmaguerAún no hay calificaciones
- Phaser 6110 ManualDocumento79 páginasPhaser 6110 Manualtotbox100% (1)
- El trading de opciones de una forma sencilla: La guía introductoria al trading de opciones y a las principales estrategias de beneficios.De EverandEl trading de opciones de una forma sencilla: La guía introductoria al trading de opciones y a las principales estrategias de beneficios.Calificación: 5 de 5 estrellas5/5 (1)
- Excel para principiantes: Aprenda a utilizar Excel 2016, incluyendo una introducción a fórmulas, funciones, gráficos, cuadros, macros, modelado, informes, estadísticas, Excel Power Query y másDe EverandExcel para principiantes: Aprenda a utilizar Excel 2016, incluyendo una introducción a fórmulas, funciones, gráficos, cuadros, macros, modelado, informes, estadísticas, Excel Power Query y másCalificación: 2.5 de 5 estrellas2.5/5 (3)
- 7 tendencias digitales que cambiarán el mundoDe Everand7 tendencias digitales que cambiarán el mundoCalificación: 4.5 de 5 estrellas4.5/5 (87)
- Guía de cálculo y diseño de conductos para ventilación y climatizaciónDe EverandGuía de cálculo y diseño de conductos para ventilación y climatizaciónCalificación: 5 de 5 estrellas5/5 (1)
- Influencia. La psicología de la persuasiónDe EverandInfluencia. La psicología de la persuasiónCalificación: 4.5 de 5 estrellas4.5/5 (14)
- EL PLAN DE MARKETING EN 4 PASOS. Estrategias y pasos clave para redactar un plan de marketing eficaz.De EverandEL PLAN DE MARKETING EN 4 PASOS. Estrategias y pasos clave para redactar un plan de marketing eficaz.Calificación: 4 de 5 estrellas4/5 (51)
- Excel 2021 y 365 Paso a Paso: Paso a PasoDe EverandExcel 2021 y 365 Paso a Paso: Paso a PasoCalificación: 5 de 5 estrellas5/5 (12)
- Clics contra la humanidad: Libertad y resistencia en la era de la distracción tecnológicaDe EverandClics contra la humanidad: Libertad y resistencia en la era de la distracción tecnológicaCalificación: 4.5 de 5 estrellas4.5/5 (117)
- Manual Técnico del Automóvil - Diccionario Ilustrado de las Nuevas TecnologíasDe EverandManual Técnico del Automóvil - Diccionario Ilustrado de las Nuevas TecnologíasCalificación: 4.5 de 5 estrellas4.5/5 (14)
- Design Thinking para principiantes: La innovación como factor para el éxito empresarialDe EverandDesign Thinking para principiantes: La innovación como factor para el éxito empresarialCalificación: 4.5 de 5 estrellas4.5/5 (10)
- Comunicación empresarial y atención al cliente (GRADO MEDIO): Emprendimiento y emprendedoresDe EverandComunicación empresarial y atención al cliente (GRADO MEDIO): Emprendimiento y emprendedoresAún no hay calificaciones
- Guía para la crianza en un mundo digital: Cómo educar para un uso sano y seguro de la tecnologíaDe EverandGuía para la crianza en un mundo digital: Cómo educar para un uso sano y seguro de la tecnologíaCalificación: 3.5 de 5 estrellas3.5/5 (2)
- Comunicaciones industriales y WinCCDe EverandComunicaciones industriales y WinCCCalificación: 5 de 5 estrellas5/5 (4)
- 100 circuitos de shields para arduino (español)De Everand100 circuitos de shields para arduino (español)Calificación: 3.5 de 5 estrellas3.5/5 (3)
- Ciberseguridad: Una Simple Guía para Principiantes sobre Ciberseguridad, Redes Informáticas y Cómo Protegerse del Hacking en Forma de Phishing, Malware, Ransomware e Ingeniería SocialDe EverandCiberseguridad: Una Simple Guía para Principiantes sobre Ciberseguridad, Redes Informáticas y Cómo Protegerse del Hacking en Forma de Phishing, Malware, Ransomware e Ingeniería SocialCalificación: 4.5 de 5 estrellas4.5/5 (11)
- El dilema humano: Del Homo sapiens al Homo techDe EverandEl dilema humano: Del Homo sapiens al Homo techCalificación: 4 de 5 estrellas4/5 (1)
- Todo Sobre Tecnología Blockchain: La Guía Definitiva Para Principiantes Sobre Monederos BlockchainDe EverandTodo Sobre Tecnología Blockchain: La Guía Definitiva Para Principiantes Sobre Monederos BlockchainAún no hay calificaciones
- Los primeros 90 días: Estrategias para ponerse al día con mayor rapidez e inteligenciaDe EverandLos primeros 90 días: Estrategias para ponerse al día con mayor rapidez e inteligenciaCalificación: 4.5 de 5 estrellas4.5/5 (7)
- La psicología del trading de una forma sencilla: Cómo aplicar las estrategias psicológicas y las actitudes de los comerciantes ganadores para operar con éxito en línea.De EverandLa psicología del trading de una forma sencilla: Cómo aplicar las estrategias psicológicas y las actitudes de los comerciantes ganadores para operar con éxito en línea.Calificación: 4.5 de 5 estrellas4.5/5 (3)
- Excel y SQL de la mano: Trabajo con bases de datos en Excel de forma eficienteDe EverandExcel y SQL de la mano: Trabajo con bases de datos en Excel de forma eficienteCalificación: 1 de 5 estrellas1/5 (1)
- Sistema de gestión lean para principiantes: Fundamentos del sistema de gestión lean para pequeñas y medianas empresas - con muchos ejemplos prácticosDe EverandSistema de gestión lean para principiantes: Fundamentos del sistema de gestión lean para pequeñas y medianas empresas - con muchos ejemplos prácticosCalificación: 4 de 5 estrellas4/5 (16)
- LAS VELAS JAPONESAS DE UNA FORMA SENCILLA. La guía de introducción a las velas japonesas y a las estrategias de análisis técnico más eficaces.De EverandLAS VELAS JAPONESAS DE UNA FORMA SENCILLA. La guía de introducción a las velas japonesas y a las estrategias de análisis técnico más eficaces.Calificación: 4.5 de 5 estrellas4.5/5 (54)
- Python Paso a paso: PROGRAMACIÓN INFORMÁTICA/DESARROLLO DE SOFTWAREDe EverandPython Paso a paso: PROGRAMACIÓN INFORMÁTICA/DESARROLLO DE SOFTWARECalificación: 4 de 5 estrellas4/5 (13)
- Inteligencia artificial: Análisis de datos e innovación para principiantesDe EverandInteligencia artificial: Análisis de datos e innovación para principiantesCalificación: 4 de 5 estrellas4/5 (3)
- UF0349: ATENCIÓN AL CLIENTE EN EL PROCESO COMERCIAL (ADGG0208) (ADGD0308)De EverandUF0349: ATENCIÓN AL CLIENTE EN EL PROCESO COMERCIAL (ADGG0208) (ADGD0308)Calificación: 2 de 5 estrellas2/5 (1)
- Lógica de programación: Solucionario en pseudocódigo – Ejercicios resueltosDe EverandLógica de programación: Solucionario en pseudocódigo – Ejercicios resueltosCalificación: 3.5 de 5 estrellas3.5/5 (7)