También podría gustarte
- Instrumentación y control en instalaciones de proceso, energía y servicios auxiliares. QUIE0108De EverandInstrumentación y control en instalaciones de proceso, energía y servicios auxiliares. QUIE0108Calificación: 4.5 de 5 estrellas4.5/5 (8)
- Resumen 1Documento4 páginasResumen 1MOISES XAVI DIAZ MEZAAún no hay calificaciones
- Instalación de equipos y elementos de sistemas de automatización industrial. ELEM0311De EverandInstalación de equipos y elementos de sistemas de automatización industrial. ELEM0311Calificación: 2 de 5 estrellas2/5 (1)
- Identificación de Variables de Un Sistema de ControlDocumento14 páginasIdentificación de Variables de Un Sistema de ControlRodri EnriquezAún no hay calificaciones
- Sistemas de Control PDFDocumento68 páginasSistemas de Control PDFroberttv374Aún no hay calificaciones
- Control AnalogicoDocumento6 páginasControl Analogicofray1308Aún no hay calificaciones
- Control Automatico de Procesos 2Documento13 páginasControl Automatico de Procesos 2elisa butoAún no hay calificaciones
- Control Modulante de ProcesosDocumento28 páginasControl Modulante de ProcesosJuan SuarezAún no hay calificaciones
- Tesis 1 (Marco Teorico)Documento7 páginasTesis 1 (Marco Teorico)royAún no hay calificaciones
- Controles Clasicos Un1Documento15 páginasControles Clasicos Un1CesarAún no hay calificaciones
- Introducción A Los Sistemas de Control IndustrialDocumento10 páginasIntroducción A Los Sistemas de Control IndustrialLuigi RodriguezAún no hay calificaciones
- Monografia - Practica 0Documento39 páginasMonografia - Practica 0luisAún no hay calificaciones
- Capitulo I Control I 2019 IIDocumento25 páginasCapitulo I Control I 2019 IIWilinthon Segura Ortega100% (1)
- TP Instrumentación y Control - Carmen MartínezDocumento13 páginasTP Instrumentación y Control - Carmen MartínezDejanira Martínez BalbuenaAún no hay calificaciones
- Imprimible Sca s1Documento9 páginasImprimible Sca s1Alejandra janethAún no hay calificaciones
- INFORMEDocumento10 páginasINFORMEAntonio CaceresAún no hay calificaciones
- P9 SabadoV3 625 1808164Documento18 páginasP9 SabadoV3 625 1808164Andres OrdoñezAún no hay calificaciones
- MonografiaDocumento13 páginasMonografiaJusto Jose Ramos AnahueAún no hay calificaciones
- Inversion de Giro de Un MotorDocumento14 páginasInversion de Giro de Un MotorAbel Apaza FuentesAún no hay calificaciones
- DinamicaDocumento8 páginasDinamicaJose FrancoAún no hay calificaciones
- Actividad 1Documento20 páginasActividad 1eduardoacevedo793Aún no hay calificaciones
- Tema 48 - Técnicas Avanzadas Regul AutomDocumento17 páginasTema 48 - Técnicas Avanzadas Regul AutomlauAún no hay calificaciones
- (Control Analogico) Evaluacion Unidad IIIDocumento16 páginas(Control Analogico) Evaluacion Unidad IIIAlfonso García MartínezAún no hay calificaciones
- Sistemas de Control AutomaticoDocumento56 páginasSistemas de Control AutomaticoAlonso GongoraAún no hay calificaciones
- Informe InstrumentacionDocumento7 páginasInforme InstrumentacionAndrewRAún no hay calificaciones
- Mi Exposición de Sistemas AutomáticosDocumento3 páginasMi Exposición de Sistemas AutomáticosGénesis Nicole Conza ZambranoAún no hay calificaciones
- Espin Deber1Documento11 páginasEspin Deber1Jonathan Antonio Espín RosalesAún no hay calificaciones
- Automatizacion ComponentesDocumento41 páginasAutomatizacion ComponentesPedro Martin Llaguento PortillaAún no hay calificaciones
- Laboratorio 1 - Automatizacion Industrial PDFDocumento24 páginasLaboratorio 1 - Automatizacion Industrial PDFichmeyo0% (1)
- SISTEMAS DE CONTROL Primer TrabajoDocumento14 páginasSISTEMAS DE CONTROL Primer TrabajoeduardoAún no hay calificaciones
- Luis Aguirre Instrumentación 2Documento6 páginasLuis Aguirre Instrumentación 2Luis AguirreAún no hay calificaciones
- Sistema MecatrónicoDocumento3 páginasSistema MecatrónicoHector GAAún no hay calificaciones
- Guía Laboratorio IDocumento16 páginasGuía Laboratorio Ijhonatan cullas urbinaAún no hay calificaciones
- Tarea No 1 Introducción A Los Sistemas de ControlDocumento20 páginasTarea No 1 Introducción A Los Sistemas de ControlTristan HernandezAún no hay calificaciones
- Control Industrial EXPDocumento12 páginasControl Industrial EXPJorge Eduardo Macías TuarezAún no hay calificaciones
- Monografia T1 Nieto CachoDocumento47 páginasMonografia T1 Nieto CachoChristian Jesús Hernández PérezAún no hay calificaciones
- Análisis Del Sistema de Control Discreto y ContinuoDocumento2 páginasAnálisis Del Sistema de Control Discreto y ContinuoBryanAún no hay calificaciones
- Cerrado Automatico de Una Cortina y Otros Dispositivos de CorrimientoDocumento9 páginasCerrado Automatico de Una Cortina y Otros Dispositivos de CorrimientoRuddy Calle AlconAún no hay calificaciones
- Capitulo I Control I Teoria 2016 IDocumento17 páginasCapitulo I Control I Teoria 2016 IYhon Polanco AimitumaAún no hay calificaciones
- Scada Supervision y ControlDocumento26 páginasScada Supervision y ControlJuan RomeroAún no hay calificaciones
- Plantilla Del ReporteDocumento5 páginasPlantilla Del ReporteBombona EsraelmAún no hay calificaciones
- Semana 1 y 2Documento21 páginasSemana 1 y 2Alejandra AgudeloAún no hay calificaciones
- I3 E4 5°eDocumento15 páginasI3 E4 5°eluis angelAún no hay calificaciones
- Sistemas de ControlDocumento19 páginasSistemas de ControlJosuè Priego SanabriaAún no hay calificaciones
- MODULO 2 Control y AutomatizacionDocumento43 páginasMODULO 2 Control y AutomatizacionEdwinCordovaPazAún no hay calificaciones
- Actividad 1 - Sistemas de Control - PDFDocumento18 páginasActividad 1 - Sistemas de Control - PDFhiram galindoAún no hay calificaciones
- Control AutomaticoDocumento13 páginasControl AutomaticoJadiel Isai100% (2)
- Sistema de ControlDocumento6 páginasSistema de ControlEimer SalgueroAún no hay calificaciones
- UNIDAD 1 ControlDocumento11 páginasUNIDAD 1 ControlJose Abraham Regalado CabreraAún no hay calificaciones
- Monografia Ingeneirea de ControDocumento13 páginasMonografia Ingeneirea de ControCristian Chata ClarosAún no hay calificaciones
- Controles AutomaticosDocumento14 páginasControles AutomaticosReynier Valor NietoAún no hay calificaciones
- UNIDAD 5 Desarrollo de Instrumentos Virtuales PDFDocumento19 páginasUNIDAD 5 Desarrollo de Instrumentos Virtuales PDFNestor CoronaAún no hay calificaciones
- Informe Sistemas de Control AutomaticoDocumento20 páginasInforme Sistemas de Control AutomaticoSebastian VegaAún no hay calificaciones
- Actividad - Sistemas de Control - Araujo Galindo - WordDocumento18 páginasActividad - Sistemas de Control - Araujo Galindo - Wordhiram galindoAún no hay calificaciones
- Informe1 Grupo4 LinoDocumento10 páginasInforme1 Grupo4 LinoMANFRED PAUL ROJAS ATIENCIEAún no hay calificaciones
- Informe1 Grupo1 JiménezDocumento16 páginasInforme1 Grupo1 JiménezMANFRED PAUL ROJAS ATIENCIEAún no hay calificaciones
- Niveles Jerarquicos de Control AvanzadoDocumento12 páginasNiveles Jerarquicos de Control AvanzadoCheChyHrAún no hay calificaciones
- Unidad 1 Agosto 2022 PDFDocumento23 páginasUnidad 1 Agosto 2022 PDFLuis GarcíaAún no hay calificaciones
- Sistemas de ControlDocumento4 páginasSistemas de ControlJAIME BOLIVAR MALO CAMPOVERDEAún no hay calificaciones
- Fundamentos de Regulación AutomáticaDocumento8 páginasFundamentos de Regulación AutomáticahombredehieloAún no hay calificaciones
- Padrón de Proveedores 2016Documento351 páginasPadrón de Proveedores 2016Gierman StaceyAún no hay calificaciones
- CI574 Formato TB1 El ProblemaDocumento14 páginasCI574 Formato TB1 El ProblemaEdison EspinozaAún no hay calificaciones
- ¿Cómo Hago La Subsanación A Un Proceso de Contratación en El SECOP II - Colombia Compra Eficiente - Agencia Nacional de Contratación PúblicaDocumento1 página¿Cómo Hago La Subsanación A Un Proceso de Contratación en El SECOP II - Colombia Compra Eficiente - Agencia Nacional de Contratación Públicajorge ramirezAún no hay calificaciones
- 15 Diferentes Extensiones de Audio.Documento2 páginas15 Diferentes Extensiones de Audio.2122300465Aún no hay calificaciones
- Tesis Participacion CiudadanaDocumento20 páginasTesis Participacion Ciudadanaspprojects0% (1)
- Sustentación MonografiaDocumento5 páginasSustentación Monografiajuan david obando adarme (Juan David Obando)Aún no hay calificaciones
- GUÍA ORIENTADORA PARA DESARROLLAR UNIDAD III (Parte 1)Documento2 páginasGUÍA ORIENTADORA PARA DESARROLLAR UNIDAD III (Parte 1)Alba Marina Rodriguez DiazAún no hay calificaciones
- ¿Qué Es AgilidadDocumento6 páginas¿Qué Es Agilidadjgiorgi_1Aún no hay calificaciones
- Reunión 29 de Diciembre 2022Documento2 páginasReunión 29 de Diciembre 2022César LÓPEZ MATIENZOAún no hay calificaciones
- Syllabus Inf 393 II 2019 BWDocumento3 páginasSyllabus Inf 393 II 2019 BWFrancisco AbarcaAún no hay calificaciones
- Robot ManipuladorDocumento3 páginasRobot ManipuladorDiego VelezAún no hay calificaciones
- Bairon Reyes Campuzano PEC1Documento4 páginasBairon Reyes Campuzano PEC1John CortezAún no hay calificaciones
- Termopar Tipo KDocumento7 páginasTermopar Tipo KAnonymous IoreTDh7Aún no hay calificaciones
- s7 Tarea Set A Matma1102Documento3 páginass7 Tarea Set A Matma1102Ignacio Mondaca Fuentes0% (3)
- Obtención de Requerimientos. Técnicas y EstrategiasDocumento9 páginasObtención de Requerimientos. Técnicas y EstrategiasezequielruizgarciaAún no hay calificaciones
- Sisprobovcarne PDFDocumento2 páginasSisprobovcarne PDFJmx Cj XAún no hay calificaciones
- Matriz de ConsistenciaDocumento1 páginaMatriz de Consistenciajuvenal aquino condezoAún no hay calificaciones
- Dgti U1 Ea TeavDocumento14 páginasDgti U1 Ea TeavTeresita De Jesus AlonzoAún no hay calificaciones
- CM20170420 47085 59951Documento24 páginasCM20170420 47085 59951gianiAún no hay calificaciones
- Sensor VSSDocumento4 páginasSensor VSSJhon LemosAún no hay calificaciones
- Ejercicios Semana 2Documento3 páginasEjercicios Semana 2Tom PinarAún no hay calificaciones
- Identificar Los Tipos de Motores Dentro de Un Sistema ElectromecanicoDocumento3 páginasIdentificar Los Tipos de Motores Dentro de Un Sistema ElectromecanicoKimSeokJin100% (1)
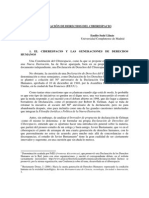
- Los Derechos Humanos en El CiberespacioDocumento20 páginasLos Derechos Humanos en El CiberespaciogabrielAún no hay calificaciones
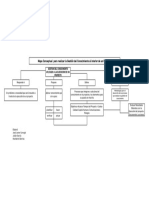
- Mapa Conceptual para Realizar La Gestión Del Conocimiento Al Interior de Un ProyectoDocumento1 páginaMapa Conceptual para Realizar La Gestión Del Conocimiento Al Interior de Un ProyectoJose Javier Carvajal PradaAún no hay calificaciones
- Empower Pre-Intermediate 3 2021Documento3 páginasEmpower Pre-Intermediate 3 2021luxi0Aún no hay calificaciones
- 3220mx - es-MX (Manual de Usuario) PDFDocumento92 páginas3220mx - es-MX (Manual de Usuario) PDFMiguel Bautista100% (2)
- Excel Intermedio 1Documento3 páginasExcel Intermedio 1antonioAún no hay calificaciones
- Operadores LogísticosDocumento26 páginasOperadores LogísticosYakuza Korps100% (1)
- Ventajas y Desventajas Del SwtichDocumento5 páginasVentajas y Desventajas Del SwtichÄbïïs R Mërcädö0% (1)
- Matriz FODA de Una ImprentaDocumento9 páginasMatriz FODA de Una ImprentaBrianAnthonyRiveraGoicocheaAún no hay calificaciones
- Clics contra la humanidad: Libertad y resistencia en la era de la distracción tecnológicaDe EverandClics contra la humanidad: Libertad y resistencia en la era de la distracción tecnológicaCalificación: 4.5 de 5 estrellas4.5/5 (117)
- Excel 2021 y 365 Paso a Paso: Paso a PasoDe EverandExcel 2021 y 365 Paso a Paso: Paso a PasoCalificación: 5 de 5 estrellas5/5 (12)
- EL PLAN DE MARKETING EN 4 PASOS. Estrategias y pasos clave para redactar un plan de marketing eficaz.De EverandEL PLAN DE MARKETING EN 4 PASOS. Estrategias y pasos clave para redactar un plan de marketing eficaz.Calificación: 4 de 5 estrellas4/5 (51)
- Excel y SQL de la mano: Trabajo con bases de datos en Excel de forma eficienteDe EverandExcel y SQL de la mano: Trabajo con bases de datos en Excel de forma eficienteCalificación: 1 de 5 estrellas1/5 (1)
- LAS VELAS JAPONESAS DE UNA FORMA SENCILLA. La guía de introducción a las velas japonesas y a las estrategias de análisis técnico más eficaces.De EverandLAS VELAS JAPONESAS DE UNA FORMA SENCILLA. La guía de introducción a las velas japonesas y a las estrategias de análisis técnico más eficaces.Calificación: 4.5 de 5 estrellas4.5/5 (54)
- Guía de cálculo y diseño de conductos para ventilación y climatizaciónDe EverandGuía de cálculo y diseño de conductos para ventilación y climatizaciónCalificación: 5 de 5 estrellas5/5 (1)
- 7 tendencias digitales que cambiarán el mundoDe Everand7 tendencias digitales que cambiarán el mundoCalificación: 4.5 de 5 estrellas4.5/5 (87)
- Influencia. La psicología de la persuasiónDe EverandInfluencia. La psicología de la persuasiónCalificación: 4.5 de 5 estrellas4.5/5 (14)
- Excel para principiantes: Aprenda a utilizar Excel 2016, incluyendo una introducción a fórmulas, funciones, gráficos, cuadros, macros, modelado, informes, estadísticas, Excel Power Query y másDe EverandExcel para principiantes: Aprenda a utilizar Excel 2016, incluyendo una introducción a fórmulas, funciones, gráficos, cuadros, macros, modelado, informes, estadísticas, Excel Power Query y másCalificación: 2.5 de 5 estrellas2.5/5 (3)
- ¿Cómo piensan las máquinas?: Inteligencia artificial para humanosDe Everand¿Cómo piensan las máquinas?: Inteligencia artificial para humanosCalificación: 5 de 5 estrellas5/5 (1)
- Lógica de programación: Solucionario en pseudocódigo – Ejercicios resueltosDe EverandLógica de programación: Solucionario en pseudocódigo – Ejercicios resueltosCalificación: 3.5 de 5 estrellas3.5/5 (7)
- EL PLAN DE NEGOCIOS DE UNA FORMA SENCILLA. La guía práctica que ayuda a poner en marcha nuevos proyectos e ideas empresariales.De EverandEL PLAN DE NEGOCIOS DE UNA FORMA SENCILLA. La guía práctica que ayuda a poner en marcha nuevos proyectos e ideas empresariales.Calificación: 4 de 5 estrellas4/5 (20)
- Machine Learning y Deep Learning: Usando Python, Scikit y KerasDe EverandMachine Learning y Deep Learning: Usando Python, Scikit y KerasAún no hay calificaciones
- Inteligencia artificial: Análisis de datos e innovación para principiantesDe EverandInteligencia artificial: Análisis de datos e innovación para principiantesCalificación: 4 de 5 estrellas4/5 (3)
- Design Thinking para principiantes: La innovación como factor para el éxito empresarialDe EverandDesign Thinking para principiantes: La innovación como factor para el éxito empresarialCalificación: 4.5 de 5 estrellas4.5/5 (10)
- El mito de la inteligencia artificial: Por qué las máquinas no pueden pensar como nosotros lo hacemosDe EverandEl mito de la inteligencia artificial: Por qué las máquinas no pueden pensar como nosotros lo hacemosCalificación: 5 de 5 estrellas5/5 (2)
- Manual Técnico del Automóvil - Diccionario Ilustrado de las Nuevas TecnologíasDe EverandManual Técnico del Automóvil - Diccionario Ilustrado de las Nuevas TecnologíasCalificación: 4.5 de 5 estrellas4.5/5 (14)
- Ciberseguridad industrial e infraestructuras críticasDe EverandCiberseguridad industrial e infraestructuras críticasAún no hay calificaciones
- Todo Sobre Tecnología Blockchain: La Guía Definitiva Para Principiantes Sobre Monederos BlockchainDe EverandTodo Sobre Tecnología Blockchain: La Guía Definitiva Para Principiantes Sobre Monederos BlockchainAún no hay calificaciones
- Problemas resueltos de Hidráulica de CanalesDe EverandProblemas resueltos de Hidráulica de CanalesCalificación: 4.5 de 5 estrellas4.5/5 (7)
- EL MARKETING DE MANERA SENCILLA. La guía práctica sobre las estrategias básicas de mercadotecnia profesional y orientación comercialDe EverandEL MARKETING DE MANERA SENCILLA. La guía práctica sobre las estrategias básicas de mercadotecnia profesional y orientación comercialCalificación: 4.5 de 5 estrellas4.5/5 (7)
- Manual de prácticas de Ingeniería de Alimentos: Propiedades, operaciones y bioprocesosDe EverandManual de prácticas de Ingeniería de Alimentos: Propiedades, operaciones y bioprocesosAún no hay calificaciones
- Curso básico de Python: La guía para principiantes para una introducción en la programación con PythonDe EverandCurso básico de Python: La guía para principiantes para una introducción en la programación con PythonAún no hay calificaciones
- La psicología del trading de una forma sencilla: Cómo aplicar las estrategias psicológicas y las actitudes de los comerciantes ganadores para operar con éxito en línea.De EverandLa psicología del trading de una forma sencilla: Cómo aplicar las estrategias psicológicas y las actitudes de los comerciantes ganadores para operar con éxito en línea.Calificación: 4.5 de 5 estrellas4.5/5 (3)