También podría gustarte
- 100 Circuitos de Shields para MotoresDe Everand100 Circuitos de Shields para MotoresCalificación: 4.5 de 5 estrellas4.5/5 (4)
- Prim Masaj Deport PDFDocumento11 páginasPrim Masaj Deport PDFjhuann0% (4)
- Sensores en Fluid SimDocumento9 páginasSensores en Fluid SimBryanyMariaAún no hay calificaciones
- Curso moderno de máquinas eléctricas rotativas. Tomo IV: Máquinas síncronas y motores c.a. de colectorDe EverandCurso moderno de máquinas eléctricas rotativas. Tomo IV: Máquinas síncronas y motores c.a. de colectorAún no hay calificaciones
- Guías Parramón para empezar a pintar. AerógrafoDe EverandGuías Parramón para empezar a pintar. AerógrafoAún no hay calificaciones
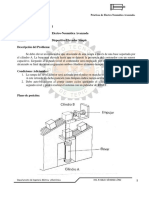
- Diseño Del Circuito Electroneumático de Una Máquina Taladradora de Bloques de Madera.Documento19 páginasDiseño Del Circuito Electroneumático de Una Máquina Taladradora de Bloques de Madera.jorge marin50% (2)
- Metodos - Intuitivo, Cascada, Paso A Paso, ElectroneumaticaDocumento34 páginasMetodos - Intuitivo, Cascada, Paso A Paso, Electroneumaticaisobaric100073% (11)
- Informe Técnico Mantenimiento AADocumento15 páginasInforme Técnico Mantenimiento AADiego Enrique Perez Breña100% (1)
- Ejercicios de Grafcet PDFDocumento69 páginasEjercicios de Grafcet PDFdizzelmx83% (6)
- Ejercicios Electroneum EnunciadosDocumento39 páginasEjercicios Electroneum Enunciadosrafael salas munosAún no hay calificaciones
- Problemas T7 PDFDocumento23 páginasProblemas T7 PDFcuyonen100% (1)
- Electroneumatica Lab 00Documento15 páginasElectroneumatica Lab 00mirzavegatapiaAún no hay calificaciones
- Introduccion A La Cartografia GeologicaDocumento90 páginasIntroduccion A La Cartografia Geologicapepo_349975% (4)
- Protocolos CIPDocumento31 páginasProtocolos CIPRonald Luis Paz LopezAún no hay calificaciones
- Taller de ElectroneumaticaDocumento7 páginasTaller de ElectroneumaticaYERSON IVAN REYES MORENOAún no hay calificaciones
- ITT - Ejercicios ElectroNeumatica Avanzada v2Documento8 páginasITT - Ejercicios ElectroNeumatica Avanzada v2Ulises Ornelas RodriguezAún no hay calificaciones
- Práctica3 GonzálezGonzálezDocumento5 páginasPráctica3 GonzálezGonzálezMario GonzalezAún no hay calificaciones
- Ejercicios ElectroneumáticaDocumento8 páginasEjercicios ElectroneumáticaInquieta MusarañaAún no hay calificaciones
- Ejercicio FUIDSIMDocumento6 páginasEjercicio FUIDSIMBryanyMariaAún no hay calificaciones
- Ejercicios de Grafcet PDFDocumento69 páginasEjercicios de Grafcet PDFJuan Carlos Cosme0% (1)
- Metodo Paso Por PasoDocumento17 páginasMetodo Paso Por PasoItzel CantuAún no hay calificaciones
- Diagrama Electroneumático de Cuatro CilindrosDocumento6 páginasDiagrama Electroneumático de Cuatro CilindrosVázquez Pérez Nicole AmairaniAún no hay calificaciones
- EJEMPLOS PRACTICOS Neumatica 1Documento10 páginasEJEMPLOS PRACTICOS Neumatica 1Roger Vera SandovalAún no hay calificaciones
- Informe Sistemas Electrohidraulicos FinalDocumento11 páginasInforme Sistemas Electrohidraulicos FinalNovena SkateAún no hay calificaciones
- Diagrama Electroneumatico Parados CilindrosDocumento6 páginasDiagrama Electroneumatico Parados CilindrosVázquez Pérez Nicole AmairaniAún no hay calificaciones
- Casos Electro-Neumáticos-Ticlla Benavides José PDFDocumento25 páginasCasos Electro-Neumáticos-Ticlla Benavides José PDFJosé Carlos Ticlla BenavidesAún no hay calificaciones
- M045 UD06 EFb1Documento8 páginasM045 UD06 EFb1JuanFreireAún no hay calificaciones
- Avance 09 - Control y Automatizacion - Informe FinalDocumento11 páginasAvance 09 - Control y Automatizacion - Informe FinalFernando HinojosaAún no hay calificaciones
- Diagrama Electroneumatico Parados CilindrosDocumento6 páginasDiagrama Electroneumatico Parados CilindrosVázquez Pérez Nicole AmairaniAún no hay calificaciones
- Electroneumática Metodo Casaca y Paso A PasoDocumento47 páginasElectroneumática Metodo Casaca y Paso A PasoJunior FigueroaAún no hay calificaciones
- Unidad 4 Circuitos Hidraulicos y NeumaticosDocumento14 páginasUnidad 4 Circuitos Hidraulicos y NeumaticosRakel Velasquez QinteroAún no hay calificaciones
- Ejercicio 3 Cilindros Secuencia ADocumento8 páginasEjercicio 3 Cilindros Secuencia ARichard FrancoAún no hay calificaciones
- To Neumatica1Documento27 páginasTo Neumatica1Manuel DomínguezAún no hay calificaciones
- Examen Segunda Unidad PDFDocumento7 páginasExamen Segunda Unidad PDFJsbonifazAún no hay calificaciones
- Ejercicios UT7SSPDocumento4 páginasEjercicios UT7SSPvictor romero andreuAún no hay calificaciones
- Informe-Cilindro en Serie FisicoDocumento8 páginasInforme-Cilindro en Serie Fisicobryan buitron100% (1)
- Aplicación de Neumática Con VacíoDocumento4 páginasAplicación de Neumática Con VacíoHenry Manuel Paredes AlvaradoAún no hay calificaciones
- Mata Alex HN102 P04Documento10 páginasMata Alex HN102 P04Alex MataAún no hay calificaciones
- Pariona Quispe Nuñez Laboratorio 9Documento14 páginasPariona Quispe Nuñez Laboratorio 9cristhianoAún no hay calificaciones
- Parte Hidráulica y ElectroneumáticaDocumento18 páginasParte Hidráulica y ElectroneumáticaRodrigo CandiaAún no hay calificaciones
- HidroneumaticaDocumento19 páginasHidroneumaticarodrigocontrerasbAún no hay calificaciones
- Informe 03 Valvulas de SecuenciaDocumento5 páginasInforme 03 Valvulas de SecuenciaReyesArangurenJuanAún no hay calificaciones
- Apuntes NeumaticaDocumento27 páginasApuntes NeumaticamoisesAún no hay calificaciones
- Secuencia Electroneumatica Ejercicio 2Documento12 páginasSecuencia Electroneumatica Ejercicio 2Jonathan EstradaAún no hay calificaciones
- INFORME Lab Oleo Hidraulica. 1Documento3 páginasINFORME Lab Oleo Hidraulica. 1David Esteban Bautista AlemanAún no hay calificaciones
- Circuitos Neumáticos.Documento8 páginasCircuitos Neumáticos.pablo romeroAún no hay calificaciones
- Ejercicio 01 Hidraulica SeminarioDocumento8 páginasEjercicio 01 Hidraulica SeminarioFran Anthony Quispe LlaveAún no hay calificaciones
- ITT - Ejercicios ElectroNeumatica Avanzada v2Documento7 páginasITT - Ejercicios ElectroNeumatica Avanzada v2MonicaFloresAún no hay calificaciones
- Circuitos NeumaticosDocumento32 páginasCircuitos NeumaticoswilliamdavidAún no hay calificaciones
- Practica 3 Sistema Neumatico e HidraulicoDocumento7 páginasPractica 3 Sistema Neumatico e HidraulicofredyAún no hay calificaciones
- Ejercicios RobóticaDocumento4 páginasEjercicios RobóticaPablo BarcenasAún no hay calificaciones
- 1 Control de La Puerta de Un AutobúsDocumento4 páginas1 Control de La Puerta de Un AutobúskenchanmAún no hay calificaciones
- Reporte NeumáticaDocumento7 páginasReporte NeumáticaDaniel RodriguezAún no hay calificaciones
- FORMATOALUMNOTRABAJOFINAL SEMESTRE VI NEUMATICA LizanaDocumento9 páginasFORMATOALUMNOTRABAJOFINAL SEMESTRE VI NEUMATICA LizanaManuel Briceño ValdiviezoAún no hay calificaciones
- LaboratorioDocumento24 páginasLaboratorioAntay AlfredoAún no hay calificaciones
- Práctica 8Documento17 páginasPráctica 8JesusAlbertoLaraCoejo100% (1)
- 04 Válvulas Hidráulicas PDFDocumento30 páginas04 Válvulas Hidráulicas PDFCarlosAún no hay calificaciones
- Laboratorio 4 NHDocumento2 páginasLaboratorio 4 NHIanDanielAyarzaSánchezAún no hay calificaciones
- Práctica 3Documento10 páginasPráctica 3Enrique Moctezuma0% (1)
- Logica CableadaDocumento16 páginasLogica CableadaValentiina AcevedoAún no hay calificaciones
- Problemario Myo 2023Documento4 páginasProblemario Myo 2023Diego JosAún no hay calificaciones
- Grupo 2Documento34 páginasGrupo 2tatocinoAún no hay calificaciones
- 1.3 Formatos Gráficos de Almacenamiento.Documento4 páginas1.3 Formatos Gráficos de Almacenamiento.juan raul hernandez moralesAún no hay calificaciones
- Manual Instalación Programación SPRINT PDFDocumento45 páginasManual Instalación Programación SPRINT PDFGustavo MarinAún no hay calificaciones
- Dpo3 U1 A1 MiacDocumento8 páginasDpo3 U1 A1 MiacMiriam Alvarez0% (1)
- 6388184146979995474ec61b 4hkl5o5w1fbkh5i44u378224b9f iKFt-Hackar-instagramDocumento4 páginas6388184146979995474ec61b 4hkl5o5w1fbkh5i44u378224b9f iKFt-Hackar-instagramFernanda SosaAún no hay calificaciones
- Proyecto de Calzado Infantil Con Sistema de Geolocalizacion.Documento11 páginasProyecto de Calzado Infantil Con Sistema de Geolocalizacion.Micael Silva CetinaAún no hay calificaciones
- Rev 0. - Boletin Informativo 012 Rebar Caps - PPT 05Documento1 páginaRev 0. - Boletin Informativo 012 Rebar Caps - PPT 05Franciscav TapiaAún no hay calificaciones
- RegimenesEjerciciosResueltos (Castellano)Documento15 páginasRegimenesEjerciciosResueltos (Castellano)Alberto Damian Gonzalez CourtenayAún no hay calificaciones
- Instrumentos AcDocumento4 páginasInstrumentos AcAnghel Ccuno Flores100% (1)
- Putgps U3 Ea Jocm.Documento4 páginasPutgps U3 Ea Jocm.Jonathan CammarAún no hay calificaciones
- Template de CurriculumDocumento19 páginasTemplate de CurriculumDavid Jair Prado CaicedoAún no hay calificaciones
- Colas 1 Modelos de Cola Infinita - Fuente Infinita - Canal Simple y MultipleDocumento38 páginasColas 1 Modelos de Cola Infinita - Fuente Infinita - Canal Simple y MultipleCarlos OswaldoAún no hay calificaciones
- PIA 2° ParcialDocumento5 páginasPIA 2° ParcialSir BrokenAún no hay calificaciones
- 3 - Tema 3 Técnicas de Evaluación Dinámica PaDocumento45 páginas3 - Tema 3 Técnicas de Evaluación Dinámica PaVivian Espindola CamargoAún no hay calificaciones
- Modelo MATRIZ ICI AII-26Documento9 páginasModelo MATRIZ ICI AII-26Gerencia Infraestructura José SabogalAún no hay calificaciones
- 2Documento4 páginas2Mario de la GarzaAún no hay calificaciones
- Rof de MefDocumento17 páginasRof de MefFredy Ramos RojasAún no hay calificaciones
- Exp5 Secundaria 3y4 Seguimosaprendiendo Educacionparaeltrabajo Act02proponemosideascreativasDocumento5 páginasExp5 Secundaria 3y4 Seguimosaprendiendo Educacionparaeltrabajo Act02proponemosideascreativasrrr12Aún no hay calificaciones
- Manual DSD Virtual - IndecopiDocumento32 páginasManual DSD Virtual - IndecopiAndrea RodriguezAún no hay calificaciones
- PolinomiosDocumento128 páginasPolinomiosElmer Augusto Marceliano CastilloAún no hay calificaciones
- Manual de LEGODocumento14 páginasManual de LEGOwilder moralesAún no hay calificaciones
- Intervalos de Calibracion InicialesDocumento2 páginasIntervalos de Calibracion InicialesMarco NavarroAún no hay calificaciones
- Información Sobre El PowePointDocumento4 páginasInformación Sobre El PowePointstephanie CerceñoAún no hay calificaciones
- Envío de Eventos PersonalizadosDocumento8 páginasEnvío de Eventos PersonalizadosTasha DuncanAún no hay calificaciones
- EncartaDocumento3 páginasEncartaLucas JaraAún no hay calificaciones
- Comunicación Entre PLC y La ElectroválvulaDocumento4 páginasComunicación Entre PLC y La ElectroválvulaRaquel PillajoAún no hay calificaciones
- Formulario Movimiento MigratorioDocumento1 páginaFormulario Movimiento MigratorioWalter E. RamosAún no hay calificaciones