También podría gustarte
- Problemas resueltos de Hidráulica de CanalesDe EverandProblemas resueltos de Hidráulica de CanalesCalificación: 4.5 de 5 estrellas4.5/5 (7)
- Tarea CapacitanciaDocumento7 páginasTarea CapacitanciaGeovanny NugraAún no hay calificaciones
- Volumen de Tanques Horizontales CilindriDocumento6 páginasVolumen de Tanques Horizontales CilindriSebastian Leonardo Huarachi100% (1)
- La ecuación general de segundo grado en dos y tres variablesDe EverandLa ecuación general de segundo grado en dos y tres variablesAún no hay calificaciones
- Capitalización ContinuaDocumento3 páginasCapitalización ContinuaAlejandro Arana Hernani100% (1)
- Problemas Fenómenos de Transporte 3h2Documento5 páginasProblemas Fenómenos de Transporte 3h2Isaac ChimalAún no hay calificaciones
- Mate Numeros Romanos 5to DDocumento6 páginasMate Numeros Romanos 5to DRgm YulietaAún no hay calificaciones
- Boit-Savart Guia de Estudio Cantu Problemas Resueltos Electricidad y MagnetismoDocumento7 páginasBoit-Savart Guia de Estudio Cantu Problemas Resueltos Electricidad y MagnetismojohnlovecraftAún no hay calificaciones
- 3espacios de Sobolev y Formulacion de Ecuaciones en Derivadas Parciales ElipticasDocumento116 páginas3espacios de Sobolev y Formulacion de Ecuaciones en Derivadas Parciales ElipticasWilliam NicolasAún no hay calificaciones
- 1111Documento3 páginas1111dianaAún no hay calificaciones
- Espacio de EstadosDocumento14 páginasEspacio de EstadosKevin MacancelaAún no hay calificaciones
- Clase Práctica 15Documento6 páginasClase Práctica 15Adrian De La RosaAún no hay calificaciones
- Informe 3Documento5 páginasInforme 3Oscar CristianAún no hay calificaciones
- Cuestionario Previo Practica 1 Laboratorio de Analisis de Circuitos Electricos - CompressDocumento6 páginasCuestionario Previo Practica 1 Laboratorio de Analisis de Circuitos Electricos - CompressEdwing GarcíaAún no hay calificaciones
- Examen 3° ParcialDocumento16 páginasExamen 3° Parcialoscar ramosAún no hay calificaciones
- Informe Senales SistemasDocumento13 páginasInforme Senales SistemasJuan ManuelAún no hay calificaciones
- Fundamentos Electronica BasicaDocumento12 páginasFundamentos Electronica Basicayeye cardonaAún no hay calificaciones
- 2023 1 SEMANA 12 EE 320 Segundo OrdenDocumento13 páginas2023 1 SEMANA 12 EE 320 Segundo OrdenzynuxsAún no hay calificaciones
- Problema 3H2Documento6 páginasProblema 3H2Jose Antonio VazquezAún no hay calificaciones
- Universidad Nacional de San Antonio Abad Del CuscoDocumento5 páginasUniversidad Nacional de San Antonio Abad Del CuscoGabriela MoralesAún no hay calificaciones
- UNIDAD 5. Dibujo AsistidoDocumento4 páginasUNIDAD 5. Dibujo AsistidoMelani PeraltaAún no hay calificaciones
- Etapa 2-Victor Ortiz.Documento9 páginasEtapa 2-Victor Ortiz.willian mendozaAún no hay calificaciones
- CH 03 - Resonadores Electromagneticos 2020Documento25 páginasCH 03 - Resonadores Electromagneticos 2020Durand Larota CristhianAún no hay calificaciones
- Modelado de Circuito ControlDocumento6 páginasModelado de Circuito ControlAndres AfanadorAún no hay calificaciones
- Control AutomaticoDocumento6 páginasControl AutomaticoDIEGO ALEJANDRO RODRÍGUEZ GARZÓNAún no hay calificaciones
- Ejercicio Resuelto 7. Análisis Del Estado Transitorio de Circuitos RC, RL y RLCDocumento10 páginasEjercicio Resuelto 7. Análisis Del Estado Transitorio de Circuitos RC, RL y RLCDiego Ivan Reyes GonzalezAún no hay calificaciones
- Potenciales CentralesDocumento2 páginasPotenciales CentralesFaby AvilésAún no hay calificaciones
- Prepa2 Modelos LinealesDocumento7 páginasPrepa2 Modelos LinealesOswaldo PalangoAún no hay calificaciones
- Ejercicio 002-Espacio de EstadosDocumento5 páginasEjercicio 002-Espacio de EstadosAndres OchoaAún no hay calificaciones
- SenoidalDocumento64 páginasSenoidalAlejandro LaraAún no hay calificaciones
- Ejercicios de Repaso U3E1Documento9 páginasEjercicios de Repaso U3E1cato061001Aún no hay calificaciones
- Etapa 2 - Dagoberto Walles BahamónDocumento4 páginasEtapa 2 - Dagoberto Walles BahamónJairo HurtatisAún no hay calificaciones
- Ejercicio Resuelto 6. Análisis Del Estado Transitorio de Circuitos RC, RL y RLCDocumento7 páginasEjercicio Resuelto 6. Análisis Del Estado Transitorio de Circuitos RC, RL y RLCDiego Ivan Reyes GonzalezAún no hay calificaciones
- Practica-1 CEIIDocumento14 páginasPractica-1 CEIIAdrian ValdiviaAún no hay calificaciones
- Problemas Variable de EstadoDocumento7 páginasProblemas Variable de EstadoBrenda Paola Lopez MartinezAún no hay calificaciones
- Solución Corte 1 Taller 2 Grupo 10Documento6 páginasSolución Corte 1 Taller 2 Grupo 10ANDREA CAROLINA GOMEZ CAMELOAún no hay calificaciones
- Sistemas EléctricosDocumento6 páginasSistemas EléctricosANDREA CAROLINA GOMEZ CAMELOAún no hay calificaciones
- Modelo Control Pi de Un Sistema EléctricoDocumento7 páginasModelo Control Pi de Un Sistema EléctricoMarly AmayaAún no hay calificaciones
- E1 FabianvargasbohorquezDocumento15 páginasE1 FabianvargasbohorquezLorena SánchezAún no hay calificaciones
- Aporte Fase3Documento7 páginasAporte Fase3kevin narvaez henriquezAún no hay calificaciones
- Modelos MatematicosDocumento22 páginasModelos MatematicosVanessa De La CruzAún no hay calificaciones
- 2001 Cataluña ProblemaA3 CDocumento2 páginas2001 Cataluña ProblemaA3 CMaria LunesAún no hay calificaciones
- Oscilador HartleyDocumento6 páginasOscilador HartleyOSORIO GALVEZ JORGE MIGUELAún no hay calificaciones
- TALLER - 1 - SUBAT - MICA (Desarrollo)Documento25 páginasTALLER - 1 - SUBAT - MICA (Desarrollo)HANNER ADITH CAJAR CAROAún no hay calificaciones
- Solo Tomamos en Cuenta Con La Coordenada Con La Que Vamos A TrabajarDocumento7 páginasSolo Tomamos en Cuenta Con La Coordenada Con La Que Vamos A Trabajarmar erazoAún no hay calificaciones
- Preparatorio 1Documento3 páginasPreparatorio 1Michael Terán PavAún no hay calificaciones
- Clase002-Señales y Respuesta ForzadaDocumento61 páginasClase002-Señales y Respuesta ForzadaRicardoAún no hay calificaciones
- FormulasDocumento2 páginasFormulasbrayan.carva.1997.15Aún no hay calificaciones
- LABO7Documento3 páginasLABO7Ariel FriasAún no hay calificaciones
- Ejemplos de Ecuaciones de Estado Con Circuitos EléctricosDocumento9 páginasEjemplos de Ecuaciones de Estado Con Circuitos Eléctricosluisa fernanda romero lozanoAún no hay calificaciones
- Tarea Instrumentacion5Documento2 páginasTarea Instrumentacion5López González César AlexanderAún no hay calificaciones
- Volumen Tanques Horizontales Cilindricos Elipticos y Semiesfericos PDFDocumento6 páginasVolumen Tanques Horizontales Cilindricos Elipticos y Semiesfericos PDFRuben MartinezAún no hay calificaciones
- 4 COmpletoDocumento4 páginas4 COmpletoMateo MogrovejoAún no hay calificaciones
- Metrica de SchwarzschildDocumento14 páginasMetrica de SchwarzschildJuan Jose Chavelas TrejoAún no hay calificaciones
- Pre Informe Siguiente Parte Lab de Ing ElectricaxDocumento11 páginasPre Informe Siguiente Parte Lab de Ing ElectricaxJohana RamirezAún no hay calificaciones
- Senoidesyfasorespresentacionppt 121125234007 Phpapp02Documento64 páginasSenoidesyfasorespresentacionppt 121125234007 Phpapp02DarwinAún no hay calificaciones
- Ejercicio 3Documento4 páginasEjercicio 3ROSAS MONTALVO JESUSAún no hay calificaciones
- 5 Ejercicios de Circuitos Electricos FinalDocumento9 páginas5 Ejercicios de Circuitos Electricos FinalErick Jean Paul TARAZONA SULCAAún no hay calificaciones
- Tres Efe DosDocumento8 páginasTres Efe DosvladimirAún no hay calificaciones
- Ejercicios de CirDocumento7 páginasEjercicios de CirErick Jean Paul TARAZONA SULCAAún no hay calificaciones
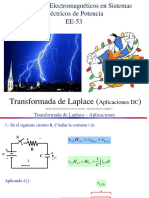
- 1.4 EE-53 Laplace Aplicaciones DCDocumento19 páginas1.4 EE-53 Laplace Aplicaciones DCOmar RamirezAún no hay calificaciones
- O6Documento1 páginaO6NILSON AREVALO RUIZAún no hay calificaciones
- Dinámica EC05 SolucionDocumento3 páginasDinámica EC05 SolucionMIGUEL MORALESAún no hay calificaciones
- Examen ProyectadoDocumento1 páginaExamen ProyectadoGeovanny NugraAún no hay calificaciones
- Tarea N 6 Electrónica de Potencia II Auquilla Cajamarca Guncay UzhcaDocumento12 páginasTarea N 6 Electrónica de Potencia II Auquilla Cajamarca Guncay UzhcaGeovanny NugraAún no hay calificaciones
- La Problemática Ambiental y El Deterioro de R.N. en El Ecuador. Una Perspectiva Desde La GeografiDocumento116 páginasLa Problemática Ambiental y El Deterioro de R.N. en El Ecuador. Una Perspectiva Desde La GeografiGeovanny NugraAún no hay calificaciones
- Convertidor BockDocumento8 páginasConvertidor BockGeovanny NugraAún no hay calificaciones
- Trabajo 1 PDFDocumento34 páginasTrabajo 1 PDFadriana villegasAún no hay calificaciones
- Rectas y LineasDocumento4 páginasRectas y LineasGJ ECAún no hay calificaciones
- Presentacion Cap 13Documento47 páginasPresentacion Cap 13Hasnleidy Lugo GutierrezAún no hay calificaciones
- Probabilidad Examen FinalDocumento9 páginasProbabilidad Examen FinalCarlosAntonioSanchezAriasAún no hay calificaciones
- Capitulo 8Documento105 páginasCapitulo 8Jazmin VásquezAún no hay calificaciones
- Formulas de Balance y TeoriaDocumento6 páginasFormulas de Balance y TeoriaLUCYAún no hay calificaciones
- Dina MicaDocumento21 páginasDina MicaGabriela LlerenaAún no hay calificaciones
- Resolución Del Examen Parcial 03 - DVDocumento13 páginasResolución Del Examen Parcial 03 - DVJoel Antaurco MelgarAún no hay calificaciones
- Algebra 17-20Documento4 páginasAlgebra 17-20Jurguen ZambranoAún no hay calificaciones
- Evidencia 1 Estadistica Descriptiva 2dDocumento15 páginasEvidencia 1 Estadistica Descriptiva 2dEimy MelendezAún no hay calificaciones
- Guia Facultativa GeoGebraDocumento11 páginasGuia Facultativa GeoGebraCliffor Jerry Herrera CastrilloAún no hay calificaciones
- Examen Python-SamuelgaravitoDocumento9 páginasExamen Python-SamuelgaravitoSamuel GaravitoAún no hay calificaciones
- TylorDocumento2 páginasTylorjoséAún no hay calificaciones
- Manual de FuncionesDocumento16 páginasManual de FuncionesRoger Alexander Saldaña SanchezAún no hay calificaciones
- CUESTIONARIODocumento3 páginasCUESTIONARIOBenito Aguirre CarreonAún no hay calificaciones
- Relaciones y GrafosDocumento13 páginasRelaciones y GrafosLuis Felipe AstorganoAún no hay calificaciones
- Prueba Matem. Potencia 1°medio 2021 - EDRDocumento3 páginasPrueba Matem. Potencia 1°medio 2021 - EDRLuis Alberto Castro CuriqueoAún no hay calificaciones
- Guia MatematicasDocumento106 páginasGuia MatematicasMelanie Rosete CruzAún no hay calificaciones
- La LógicaDocumento4 páginasLa LógicaArnold BustinzaAún no hay calificaciones
- REPASO Practica Calificada 1Documento32 páginasREPASO Practica Calificada 1Ruben Walter Vivas JimenezAún no hay calificaciones
- Matematica 51 - Guia 3 LimiteDocumento86 páginasMatematica 51 - Guia 3 LimiteTwiggy ShapiamaAún no hay calificaciones
- Logro de La Sesión: Al Finalizar La Sesión, El Estudiante Calcula El Perímetro de Una Región Haciendo Uso de La Integral DefinidaDocumento5 páginasLogro de La Sesión: Al Finalizar La Sesión, El Estudiante Calcula El Perímetro de Una Región Haciendo Uso de La Integral DefinidaJhunior Jhonatan Ramírez CarranzaAún no hay calificaciones
- Pruebadestacadaoma27 08 2022Documento2 páginasPruebadestacadaoma27 08 2022Vicky ToonsAún no hay calificaciones
- ACA 1 Lógica y Pensamiento MatemáticoDocumento3 páginasACA 1 Lógica y Pensamiento MatemáticoLeidy MuñozAún no hay calificaciones
- Volúmenes 2019Documento2 páginasVolúmenes 2019MGGAAún no hay calificaciones