También podría gustarte
- Trabajo de CalculoDocumento4 páginasTrabajo de CalculoJHONAún no hay calificaciones
- 2curvatura TorsionDocumento3 páginas2curvatura TorsionMARCO ANTONIO QUISPE HUARCAAún no hay calificaciones
- Funciones vectoriales curvaturaDocumento8 páginasFunciones vectoriales curvaturaSuampy MondragonAún no hay calificaciones
- Curvas Planas, Ecuaciones Paramétricas y Coordenadas PolaresDocumento7 páginasCurvas Planas, Ecuaciones Paramétricas y Coordenadas PolaresAlejandraAún no hay calificaciones
- Superficies IDocumento11 páginasSuperficies IMercedes GutierrezAún no hay calificaciones
- Cálculo de Múltiples Variables en Curvas y SuperficiesDocumento14 páginasCálculo de Múltiples Variables en Curvas y Superficieshebethcueva2Aún no hay calificaciones
- Calculo Iii 7.2Documento10 páginasCalculo Iii 7.2Anthony Gonzales SotoAún no hay calificaciones
- La Recta en El Sistema Coordenado BidimensionalDocumento63 páginasLa Recta en El Sistema Coordenado BidimensionalMarjorie perezAún no hay calificaciones
- 1.-Funciones VectorialesDocumento27 páginas1.-Funciones VectorialesSamir Estela LopezAún no hay calificaciones
- Clase 6.-Longitud de ArcoDocumento9 páginasClase 6.-Longitud de ArcoLaura Lucila Arbulú BaquedanoAún no hay calificaciones
- El Plano EuclidianoDocumento27 páginasEl Plano EuclidianoChristopper Vasquez CrispinAún no hay calificaciones
- Diapositiva 4Documento18 páginasDiapositiva 4Jorge SanchezAún no hay calificaciones
- Campos VectorialesDocumento21 páginasCampos VectorialesFlorSotoAún no hay calificaciones
- Derivadas-2 9295Documento44 páginasDerivadas-2 9295Kevin GarciaAún no hay calificaciones
- TEMA 1 Ecuaciones Paramétricas y Coordenadas Polares-Cesar-21-1Documento33 páginasTEMA 1 Ecuaciones Paramétricas y Coordenadas Polares-Cesar-21-1Adriana BettzAún no hay calificaciones
- CURVATURA y VECTORES NORMALESDocumento3 páginasCURVATURA y VECTORES NORMALESDamian Oropeza CuetoAún no hay calificaciones
- S24 - Curvas Paramétricas en R2Documento14 páginasS24 - Curvas Paramétricas en R2Luz AlvarezAún no hay calificaciones
- Longitud de ArcoDocumento20 páginasLongitud de ArcoBriana Flores FloresAún no hay calificaciones
- S05.s1 - Ejercicios para PracticarDocumento26 páginasS05.s1 - Ejercicios para PracticarCristhian ZacariasAún no hay calificaciones
- Funciones de Valores VectorialesDocumento8 páginasFunciones de Valores VectorialesJúán Cárlos Garrochamba100% (1)
- Centro de gravedad y momento de inerciaDocumento14 páginasCentro de gravedad y momento de inerciaOmar0% (1)
- Parametrización - Funciones VectorialesDocumento20 páginasParametrización - Funciones VectorialesJose FAún no hay calificaciones
- Actividad 8 - Pendiente y Ángulo de Segmento de RectaDocumento3 páginasActividad 8 - Pendiente y Ángulo de Segmento de RectaRAFAEL SAMANO PICHARDOAún no hay calificaciones
- Longitud de Arco y CurvaturaDocumento7 páginasLongitud de Arco y CurvaturaHéctor Ramírez SernaAún no hay calificaciones
- Ecuación de La RectaDocumento25 páginasEcuación de La RectaDILVER PACHECO REYESAún no hay calificaciones
- El Plano EuclideanoDocumento45 páginasEl Plano EuclideanoDeyvi La Rosa OrtegaAún no hay calificaciones
- 3-.Funciones Vectoriales y Curvas en El EspacioDocumento13 páginas3-.Funciones Vectoriales y Curvas en El EspacioJONATAN ALEX LEIVA BAUTISTAAún no hay calificaciones
- Guía Rectas y Vectores en El PlanoDocumento14 páginasGuía Rectas y Vectores en El PlanoEnzo AraujoAún no hay calificaciones
- Guía Rectas y Vectores en El PlanoDocumento14 páginasGuía Rectas y Vectores en El PlanoJulio Maximiliano CorderoAún no hay calificaciones
- Guía Clase 1er Parcial GA (Ing) 2022-2Documento24 páginasGuía Clase 1er Parcial GA (Ing) 2022-2Juan VelardeAún no hay calificaciones
- Ometria A.2Documento16 páginasOmetria A.2Kevin OsedaAún no hay calificaciones
- Curvatura de Una CurvaDocumento8 páginasCurvatura de Una CurvaAndrés HernándezAún no hay calificaciones
- Conf. 8 Derivadas Parciales y Diferenciabilidad de FRVVDocumento10 páginasConf. 8 Derivadas Parciales y Diferenciabilidad de FRVVAna KarlaAún no hay calificaciones
- 04 em 07 Emcved U3 A5 Manuel ManjarrezDocumento15 páginas04 em 07 Emcved U3 A5 Manuel ManjarrezmanuelAún no hay calificaciones
- Unidad N°5: Cónicas Transformación de Coordenadas CartesianasDocumento18 páginasUnidad N°5: Cónicas Transformación de Coordenadas CartesianasRuht SimsAún no hay calificaciones
- Definiciones de VectoresDocumento8 páginasDefiniciones de VectoresRangel Xavier Gonzalez DiazAún no hay calificaciones
- Clasificacion de Las FuncionesDocumento7 páginasClasificacion de Las Funcionesnan.aide.ncAún no hay calificaciones
- Investigación Unidad 2Documento7 páginasInvestigación Unidad 2Itza Coloriano RojasAún no hay calificaciones
- Introducción: DerivadaDocumento55 páginasIntroducción: DerivadaJoiser Lopez RiscoAún no hay calificaciones
- Unidad 5Documento19 páginasUnidad 5penad2931Aún no hay calificaciones
- Contenido UNIDAD III - Funciones VectorialesDocumento36 páginasContenido UNIDAD III - Funciones VectorialesDiego TorrezAún no hay calificaciones
- Resumen. Álgebra y Geometría AnalíticaDocumento25 páginasResumen. Álgebra y Geometría AnalíticaIara MartinelliAún no hay calificaciones
- Ecuacion de La Recta Nuevo Formato.Documento8 páginasEcuacion de La Recta Nuevo Formato.rosmarga28Aún no hay calificaciones
- Principios Algebraicos Básicos: Profesor Morrison Ernesto Rodríguez GutiérrezDocumento12 páginasPrincipios Algebraicos Básicos: Profesor Morrison Ernesto Rodríguez GutiérreztonAún no hay calificaciones
- Tema #1 - Ecuación de Una RectaDocumento5 páginasTema #1 - Ecuación de Una RectaE Tatiana Del RosarioAún no hay calificaciones
- Sesión 11.1-Intgrl de Línea para Campos Escalares y VectorialesDocumento20 páginasSesión 11.1-Intgrl de Línea para Campos Escalares y Vectorialesgianella sanabriaAún no hay calificaciones
- Triedro de FrenetDocumento4 páginasTriedro de Frenetedwyn changoluisaAún no hay calificaciones
- Ecuaciones de rectas en R3Documento19 páginasEcuaciones de rectas en R3J ZAún no hay calificaciones
- Unidad 2 - Curvas Planas, Ecuaciones Paramétricas y Coordenadas PolaresDocumento11 páginasUnidad 2 - Curvas Planas, Ecuaciones Paramétricas y Coordenadas PolaresLeonel Tránsito MondragónAún no hay calificaciones
- Clase 5 de Cálculo IIIDocumento25 páginasClase 5 de Cálculo IIIjulio100% (1)
- Clase 08 - Geometría AnalíticaDocumento22 páginasClase 08 - Geometría Analíticayenycardozo766Aún no hay calificaciones
- Unidad I Segmento Teoria Geometria AnaliticaDocumento4 páginasUnidad I Segmento Teoria Geometria Analiticaluis sanchezAún no hay calificaciones
- CamptensorialesDocumento20 páginasCamptensorialesDidier DetchemendyAún no hay calificaciones
- Momentos de torsión y deformaciones en barras circularesDocumento6 páginasMomentos de torsión y deformaciones en barras circulareskevin AlvarezAún no hay calificaciones
- Aplicativos Calculo Clase 13Documento7 páginasAplicativos Calculo Clase 13Bryan MatuteAún no hay calificaciones
- Ecuaciones paramétricas y polaresDocumento8 páginasEcuaciones paramétricas y polaresJorge Luis Hernandez VAún no hay calificaciones
- IntegralTriple ResueltoDocumento13 páginasIntegralTriple ResueltoAlejandra GpAún no hay calificaciones
- Estaticade EstructurasDocumento165 páginasEstaticade Estructurasjaviermm023Aún no hay calificaciones
- E.2.1.ENUNCIADO DIEDRICO. Cubo Apoyado en AristaDocumento1 páginaE.2.1.ENUNCIADO DIEDRICO. Cubo Apoyado en AristaAlejandra GpAún no hay calificaciones
- Practica c1 2021 22Documento4 páginasPractica c1 2021 22Alejandra GpAún no hay calificaciones
- Impuesto Al Degüello de GanadoDocumento7 páginasImpuesto Al Degüello de GanadoMayerly Noguera CuaranAún no hay calificaciones
- Ejercicios FisicaDocumento7 páginasEjercicios FisicaDiego M CacerezAún no hay calificaciones
- Imprimir Curriculum JuvenalDocumento15 páginasImprimir Curriculum JuvenalYoviss PalominoAún no hay calificaciones
- Modelo matemático enfriamiento aguaDocumento30 páginasModelo matemático enfriamiento agua01-IC-HU-GUSTAVO ANTONY MENDEZ JULCARIMAAún no hay calificaciones
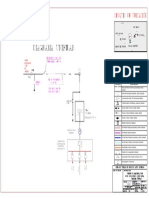
- A6-Diagrama Unifilar Almachi Iza JQDocumento1 páginaA6-Diagrama Unifilar Almachi Iza JQJohnny QuirogaAún no hay calificaciones
- Sesion de Clase Sobre Simulacro de Sismo 2022Documento3 páginasSesion de Clase Sobre Simulacro de Sismo 2022Luis Pablo Vilcachagua FerrerAún no hay calificaciones
- Historia Examen de Primer Quimestre (Reflexión)Documento4 páginasHistoria Examen de Primer Quimestre (Reflexión)Edison CaraguayAún no hay calificaciones
- Práctica N°5 - TOXDocumento5 páginasPráctica N°5 - TOXDiego Iván De La CruzAún no hay calificaciones
- Cerco PerimetricoDocumento31 páginasCerco PerimetricoGiancarlo Flores DelgadoAún no hay calificaciones
- Bioseguridad quirófanoDocumento46 páginasBioseguridad quirófanoMiguel ÑañezlAún no hay calificaciones
- BioplasticosDocumento7 páginasBioplasticosJoseph Benitez ManosalvaAún no hay calificaciones
- 16 Ficha 2066043 (SERVICIOS DE ALOJAMIENTO)Documento34 páginas16 Ficha 2066043 (SERVICIOS DE ALOJAMIENTO)Princh Romantine covers y compositor MendozaAún no hay calificaciones
- Plan de TesisDocumento24 páginasPlan de Tesiseddson leonAún no hay calificaciones
- Sesión 12 - Practica InmunodepresoraDocumento11 páginasSesión 12 - Practica InmunodepresoramonchitoAún no hay calificaciones
- Diseno de CanalesDocumento102 páginasDiseno de CanalesKevin EndaraAún no hay calificaciones
- El Principio de PascalDocumento3 páginasEl Principio de PascalNataly HenriquezAún no hay calificaciones
- Cosechadora Claas Lexion PDFDocumento73 páginasCosechadora Claas Lexion PDFJose Cantero Castillo100% (1)
- Rotafolio Diabetes Bienestar y SaludDocumento28 páginasRotafolio Diabetes Bienestar y Saludcarhe catacamas100% (1)
- Contrato de Arrendamiento de Vehículo Autoservicios JhonDocumento3 páginasContrato de Arrendamiento de Vehículo Autoservicios JhonKatherineNuñezEffioAún no hay calificaciones
- Facilitación Del Habla en TQT PDFDocumento6 páginasFacilitación Del Habla en TQT PDFMariita FuentesAún no hay calificaciones
- Ecosistemas Terrestres Guia 12Documento4 páginasEcosistemas Terrestres Guia 12Cárdenas Ana LuciaAún no hay calificaciones
- Villanueva 2Documento378 páginasVillanueva 2Bettas GusanitoAún no hay calificaciones
- SA8 Productos y RendimientosDocumento2 páginasSA8 Productos y Rendimientoseliana hermosillaAún no hay calificaciones
- Kokkedal Climate Adaptation: Teoría Del Paisaje II Seminario #1Documento36 páginasKokkedal Climate Adaptation: Teoría Del Paisaje II Seminario #1JoseAún no hay calificaciones
- PRÁCTICA CALIFICADA DE MATEMÁTICA de 4° SEC ENERODocumento16 páginasPRÁCTICA CALIFICADA DE MATEMÁTICA de 4° SEC ENEROjoseAún no hay calificaciones
- Bonos de Carbono Equipo 9..Documento35 páginasBonos de Carbono Equipo 9..Jhoseling Soto SalasAún no hay calificaciones
- Histología de Órganos Reproductores MasculinosDocumento13 páginasHistología de Órganos Reproductores MasculinosCesar Alberto Alzate SantaAún no hay calificaciones
- Folleto de BiologiaDocumento35 páginasFolleto de BiologiaKevin Moposita100% (1)
- 12 - Ecoproductos Industriales y Mercados de CarbonoDocumento57 páginas12 - Ecoproductos Industriales y Mercados de CarbonoVivian Alejandra Pe�a ChunzaAún no hay calificaciones
- Dimensiones Del Síndrome de BurnoutDocumento57 páginasDimensiones Del Síndrome de BurnoutAlma Rosa UG0% (1)
- La guía definitiva en Matemáticas para el Ingreso al BachilleratoDe EverandLa guía definitiva en Matemáticas para el Ingreso al BachilleratoCalificación: 4.5 de 5 estrellas4.5/5 (9)
- Inteligencia artificial: Lo que usted necesita saber sobre el aprendizaje automático, robótica, aprendizaje profundo, Internet de las cosas, redes neuronales, y nuestro futuroDe EverandInteligencia artificial: Lo que usted necesita saber sobre el aprendizaje automático, robótica, aprendizaje profundo, Internet de las cosas, redes neuronales, y nuestro futuroCalificación: 4 de 5 estrellas4/5 (1)
- La Biblia de las Matemáticas RápidasDe EverandLa Biblia de las Matemáticas RápidasCalificación: 4.5 de 5 estrellas4.5/5 (19)
- Estadística básica: Introducción a la estadística con RDe EverandEstadística básica: Introducción a la estadística con RCalificación: 5 de 5 estrellas5/5 (8)
- El físico y el filósofo: Albert Einstein, Henri Bergson y el debate que cambió nuestra comprensión del tiempoDe EverandEl físico y el filósofo: Albert Einstein, Henri Bergson y el debate que cambió nuestra comprensión del tiempoAún no hay calificaciones
- Cuántica: Qué significa la teoría de la ciencia más extrañaDe EverandCuántica: Qué significa la teoría de la ciencia más extrañaCalificación: 1 de 5 estrellas1/5 (1)
- Mentalidades matemáticas: Cómo liberar el potencial de los estudiantes mediante las matemáticas creativas, mensajes inspiradores y una enseñanza innovadoraDe EverandMentalidades matemáticas: Cómo liberar el potencial de los estudiantes mediante las matemáticas creativas, mensajes inspiradores y una enseñanza innovadoraCalificación: 4.5 de 5 estrellas4.5/5 (5)
- Análisis estructural mediante el método de los elementos finitos. Introducción al comportamiento lineal elásticoDe EverandAnálisis estructural mediante el método de los elementos finitos. Introducción al comportamiento lineal elásticoCalificación: 4.5 de 5 estrellas4.5/5 (12)
- El cerebro matemático: Cómo nacen, viven y a veces mueren los números en nuestra menteDe EverandEl cerebro matemático: Cómo nacen, viven y a veces mueren los números en nuestra menteCalificación: 4 de 5 estrellas4/5 (5)
- La Teoría de Conjuntos y los Fundamentos de las MatemáticasDe EverandLa Teoría de Conjuntos y los Fundamentos de las MatemáticasCalificación: 5 de 5 estrellas5/5 (1)
- Álgebra lineal aplicada a las ciencias económicas 2edDe EverandÁlgebra lineal aplicada a las ciencias económicas 2edCalificación: 4 de 5 estrellas4/5 (1)
- Problemas de física general en un año olímpicoDe EverandProblemas de física general en un año olímpicoCalificación: 5 de 5 estrellas5/5 (1)
- Enseñar Matemática hoy: Miradas, sentidos y desafíosDe EverandEnseñar Matemática hoy: Miradas, sentidos y desafíosCalificación: 5 de 5 estrellas5/5 (1)
- Visualización: Cambie su vida en cuatro semanas utilizando la ley de atracciónDe EverandVisualización: Cambie su vida en cuatro semanas utilizando la ley de atracciónCalificación: 5 de 5 estrellas5/5 (18)
- Matemáticas financierasDe EverandMatemáticas financierasCalificación: 4 de 5 estrellas4/5 (7)
- Física cuántica para principiantes: Descubra los fundamentos de la mecánica cuántica y cómo afecta al mundo en que vivimos a través de todas sus teorías más famosasDe EverandFísica cuántica para principiantes: Descubra los fundamentos de la mecánica cuántica y cómo afecta al mundo en que vivimos a través de todas sus teorías más famosasCalificación: 5 de 5 estrellas5/5 (4)
- Física paso a paso: Más de 100 problemas resueltosDe EverandFísica paso a paso: Más de 100 problemas resueltosCalificación: 4 de 5 estrellas4/5 (12)
- Análisis estadístico de datos multivariadosDe EverandAnálisis estadístico de datos multivariadosCalificación: 5 de 5 estrellas5/5 (1)