También podría gustarte
- Métodos Matriciales para ingenieros con MATLABDe EverandMétodos Matriciales para ingenieros con MATLABCalificación: 5 de 5 estrellas5/5 (1)
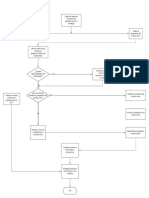
- Diagrama de FlujoDocumento3 páginasDiagrama de Flujocrismar2016100% (1)
- Práctica 3Documento19 páginasPráctica 3Isael CamarilloAún no hay calificaciones
- Guión de Noticiero 25 de MayoDocumento4 páginasGuión de Noticiero 25 de MayoPato CriolloAún no hay calificaciones
- Informe de Laboratorio 1Documento13 páginasInforme de Laboratorio 1keyty maviAún no hay calificaciones
- Tarea Unidad1Documento2 páginasTarea Unidad1Jose Gregorio Arevalo CantilloAún no hay calificaciones
- Constitución de Una EIRLDocumento24 páginasConstitución de Una EIRLAldiRAún no hay calificaciones
- Saltos de AguaDocumento66 páginasSaltos de AguaClaudia Beyzeth VazalloAún no hay calificaciones
- Máquinas simples y compuestas: características y funcionesDocumento5 páginasMáquinas simples y compuestas: características y funcionesKMiiloMeJiiaAún no hay calificaciones
- !LAB07 CBA Huamani Juculaca Cueva Mamani Chura QuispeDocumento11 páginas!LAB07 CBA Huamani Juculaca Cueva Mamani Chura Quispenormand carrilloAún no hay calificaciones
- Mado Derecha, VioloncheloDocumento121 páginasMado Derecha, VioloncheloLuz100% (2)
- Lab 01 MS GRUPO 1Documento11 páginasLab 01 MS GRUPO 1jhon bryanAún no hay calificaciones
- Mecánica de Sólidos: Laboratorio N°01 Primera Condición de EquilirioDocumento9 páginasMecánica de Sólidos: Laboratorio N°01 Primera Condición de EquiliriomarcoAún no hay calificaciones
- Fisica Equilibrio Lab 1 JaaaaaaaaaDocumento9 páginasFisica Equilibrio Lab 1 JaaaaaaaaaLuis Fernando Portgas D. SolariAún no hay calificaciones
- Lab 01Documento13 páginasLab 01Yubert Edisson Huanca LimaAún no hay calificaciones
- Reporte de Lab 1 Grupo 3 C21-BDocumento11 páginasReporte de Lab 1 Grupo 3 C21-BAdriel AguirreAún no hay calificaciones
- Lab 01Documento9 páginasLab 01Rony Genaro Quispe CoricazaAún no hay calificaciones
- Laboratorio #02 Primera Condición de Equilibrio Grupo 3-1Documento10 páginasLaboratorio #02 Primera Condición de Equilibrio Grupo 3-1Aldo Cesar Cabrera AlccahuamanAún no hay calificaciones
- Laboratorio #02 Primera Condición de Equilibrio-1dddddaaaaDocumento11 páginasLaboratorio #02 Primera Condición de Equilibrio-1dddddaaaaAlexis Laura CcaritaAún no hay calificaciones
- Informe P (1-2) Orellana Salinas Juan Diego GDocumento17 páginasInforme P (1-2) Orellana Salinas Juan Diego GJuan Diego OrellanaAún no hay calificaciones
- Reporte de Laboratorio 01 Grupo 7Documento7 páginasReporte de Laboratorio 01 Grupo 7Jerson SotoAún no hay calificaciones
- Reporte de Laboratorio 01Documento7 páginasReporte de Laboratorio 01Erikson Reyes Quispe FloresAún no hay calificaciones
- Práctica 2 Equilibrio de partícula 2D Estática 2023 finalDocumento26 páginasPráctica 2 Equilibrio de partícula 2D Estática 2023 finalelliot.macedoAún no hay calificaciones
- Movimiento Armonico SimpleDocumento8 páginasMovimiento Armonico SimpleRicardo Antonio Carrasco HuancasAún no hay calificaciones
- Lb-01Primera Condición de EquilibrioDocumento8 páginasLb-01Primera Condición de EquilibrioGersson Clemente Montes PachaoAún no hay calificaciones
- Fisica InformeDocumento31 páginasFisica InformeEscobedo Velarde EddyAún no hay calificaciones
- c2 Pre Fuerzas CoplanaresDocumento10 páginasc2 Pre Fuerzas CoplanaresJuan Daniel Gomez RemolinaAún no hay calificaciones
- Segundo Lab de Fisica MecanicaDocumento6 páginasSegundo Lab de Fisica MecanicabrayancorreaAún no hay calificaciones
- Reporte 5 - Analisis Dinamico de Sistemas MecanicosDocumento15 páginasReporte 5 - Analisis Dinamico de Sistemas MecanicosMariana PadronAún no hay calificaciones
- Equilibrio de Fuerzas Informe de FisicaDocumento10 páginasEquilibrio de Fuerzas Informe de FisicacaprionAún no hay calificaciones
- Objetiv OsDocumento16 páginasObjetiv OsNeftali Cortes VillaAún no hay calificaciones
- Lab Fisarq S03 VCDocumento5 páginasLab Fisarq S03 VCSilvana Cordova GarciaAún no hay calificaciones
- TP3 FisicaDocumento9 páginasTP3 FisicaElperroqueevolucionaAún no hay calificaciones
- Vectores Informe N°02: ResumenDocumento10 páginasVectores Informe N°02: ResumenSamuel HerreraAún no hay calificaciones
- Dinámica LinealDocumento5 páginasDinámica LinealEdomex Volpato OliveyraAún no hay calificaciones
- Estatica Primera Condicion de Equilibrio MejoradoDocumento11 páginasEstatica Primera Condicion de Equilibrio Mejoradojoni2709100% (1)
- Experimento 1 - S1 2019Documento4 páginasExperimento 1 - S1 2019testeerAún no hay calificaciones
- Informe Laboratorio N°01 - 3Documento14 páginasInforme Laboratorio N°01 - 3BRENDA ARIANA GARCIA ZUMAETAAún no hay calificaciones
- PRACTICA #1 SUMA DE FUERZAS UacjDocumento12 páginasPRACTICA #1 SUMA DE FUERZAS UacjJared Aldair Martinez RamirezAún no hay calificaciones
- Guía 6 MRUA-lab. Fisica I-Gral - Cassy Lab 2Documento4 páginasGuía 6 MRUA-lab. Fisica I-Gral - Cassy Lab 2Diego Marcelo Cuaical0% (1)
- Cálculo de Reacciones en Armaduras Utilizando MatlabDocumento10 páginasCálculo de Reacciones en Armaduras Utilizando MatlabJorge RamirezAún no hay calificaciones
- Equilibrio de Fuerzas Lab: Condiciones de EquilibrioDocumento18 páginasEquilibrio de Fuerzas Lab: Condiciones de EquilibrioIvan Cueva0% (1)
- Lab 04Documento9 páginasLab 04Daniel Andre Omar Gutierrez ChuctayaAún no hay calificaciones
- Práctica de Laboratorio #01Documento24 páginasPráctica de Laboratorio #01John DiazAún no hay calificaciones
- LAB_FISI1_S02_CF_2024Documento6 páginasLAB_FISI1_S02_CF_2024Daniel ReyesAún no hay calificaciones
- Practica 7 (1)Documento7 páginasPractica 7 (1)Emmanuel GómezAún no hay calificaciones
- LaboratorioDocumento4 páginasLaboratorioeduc2008Aún no hay calificaciones
- Estática CivilDocumento34 páginasEstática Civilfrutas12Aún no hay calificaciones
- Práctica 1 Física I-Estática 2014Documento8 páginasPráctica 1 Física I-Estática 2014AlejandraMurilloAún no hay calificaciones
- Fisica I - Practica 3Documento2 páginasFisica I - Practica 3Victor Alfonso Montero JavierAún no hay calificaciones
- Equilibrio de vectores y momentos de fuerzaDocumento8 páginasEquilibrio de vectores y momentos de fuerzaGus Rodriguez AruquipaAún no hay calificaciones
- Mediciones de Un Sistema de 3 FuerzasDocumento21 páginasMediciones de Un Sistema de 3 FuerzasjosetorrsbbAún no hay calificaciones
- LF Act 4 Muñoz MolinaDocumento13 páginasLF Act 4 Muñoz MolinaRotciv Con Un Poco De LimónAún no hay calificaciones
- CBA GUIA 5 Conservación de Energía Profesor RequenaDocumento16 páginasCBA GUIA 5 Conservación de Energía Profesor RequenaLuis Angel Cottos ZelaAún no hay calificaciones
- IncompletoDocumento21 páginasIncompletojosue flores mendozaAún no hay calificaciones
- Análisis vectores arquitecturaDocumento5 páginasAnálisis vectores arquitecturayenifer paola bal perezAún no hay calificaciones
- Informe 1 Estatica Mesa 3Documento53 páginasInforme 1 Estatica Mesa 3Ray AldahirAún no hay calificaciones
- Trabajo2 FACTS - Manuel CeaDocumento26 páginasTrabajo2 FACTS - Manuel CeaManuel Cea BarrientosAún no hay calificaciones
- Informe de Laboratorio 2-1Documento9 páginasInforme de Laboratorio 2-1ga9649402Aún no hay calificaciones
- Practica de Laboratorio N°1Documento7 páginasPractica de Laboratorio N°1Emerson RojasAún no hay calificaciones
- Guía 9 SEGUNDA LEY - Lab Fisica I-Gral - Cassy Lab 2Documento3 páginasGuía 9 SEGUNDA LEY - Lab Fisica I-Gral - Cassy Lab 2Yiceth BurbanoAún no hay calificaciones
- Fisica para IngenieriaDocumento12 páginasFisica para Ingenieriafernando angelesAún no hay calificaciones
- Suma de Vectores en 2 D BiologiaDocumento4 páginasSuma de Vectores en 2 D BiologiaANDREA CAMILA PERDOMO ANDRADEAún no hay calificaciones
- Segunda Ley de NewtonDocumento14 páginasSegunda Ley de NewtonSergio Tafur GarciaAún no hay calificaciones
- Practica 4.-Resultante de Fuerzas CoplanaresDocumento6 páginasPractica 4.-Resultante de Fuerzas Coplanaresangel6m2hAún no hay calificaciones
- Equilibrio de fuerzas en plano inclinado y mesaDocumento6 páginasEquilibrio de fuerzas en plano inclinado y mesaYuliana Ramirez LoaizaAún no hay calificaciones
- Investigación de MercadosDocumento1 páginaInvestigación de MercadosalbieriaqperuAún no hay calificaciones
- Lab 04 - Introducción A PythonDocumento19 páginasLab 04 - Introducción A PythonalbieriaqperuAún no hay calificaciones
- Lab 04 - Introducción A PythonDocumento19 páginasLab 04 - Introducción A PythonalbieriaqperuAún no hay calificaciones
- Instalación y Uso de Herramientas de DesarrolloDocumento13 páginasInstalación y Uso de Herramientas de DesarrolloalbieriaqperuAún no hay calificaciones
- Secuencia de Soporte Tecnico 2016 Sec - 3Documento54 páginasSecuencia de Soporte Tecnico 2016 Sec - 3margarita rizo100% (1)
- Convocatoria Revista DIVINITATISDocumento5 páginasConvocatoria Revista DIVINITATISAmiel R. QuinoAún no hay calificaciones
- CuartillaDocumento3 páginasCuartillaMarley Sidney BoadasAún no hay calificaciones
- Enfoques curricularesDocumento8 páginasEnfoques curricularesLuigi Stewart Laureano EspinolaAún no hay calificaciones
- Diferencia Entre Grasas y AceitesDocumento5 páginasDiferencia Entre Grasas y AceitesEdgar Peña OrtegaAún no hay calificaciones
- Diagramas de FlujoDocumento1 páginaDiagramas de Flujoelias anculleAún no hay calificaciones
- Hoja de Trabajo Ii Hombre Ciencia y Filosofia - EstudianteDocumento5 páginasHoja de Trabajo Ii Hombre Ciencia y Filosofia - EstudianteImer SalgueroAún no hay calificaciones
- Intercambiadores de CalorDocumento35 páginasIntercambiadores de CalorHarold AriasAún no hay calificaciones
- Teoría de buque: flotabilidad, estabilidad y clasificaciónDocumento6 páginasTeoría de buque: flotabilidad, estabilidad y clasificaciónAnaliz DomínguezAún no hay calificaciones
- QuantumDocumento3 páginasQuantumWilson ParkerAún no hay calificaciones
- 04 - 09 - TALLER - Concepto - Estructuras AlgorítmicasDocumento3 páginas04 - 09 - TALLER - Concepto - Estructuras AlgorítmicasIng. Kevin García AguilarAún no hay calificaciones
- Autodeterminación tributariaDocumento10 páginasAutodeterminación tributariaMagleny AlejoAún no hay calificaciones
- Sílabo Álgebra y Geometría AnalíticaDocumento7 páginasSílabo Álgebra y Geometría AnalíticaMARIA FERNANDA EGUILUZ ROBLESAún no hay calificaciones
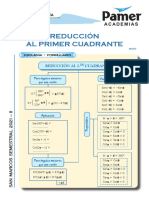
- T - Sem7 - Reducción Al Primer CuadranteDocumento3 páginasT - Sem7 - Reducción Al Primer CuadranteJesús Curasma de la CruzAún no hay calificaciones
- Mic U1 Ea KaapDocumento8 páginasMic U1 Ea KaapkaremAún no hay calificaciones
- Clasificacion de CarreteraDocumento18 páginasClasificacion de CarreteraGiancarlo Barturen Manay100% (1)
- Linea de ImpulsionDocumento18 páginasLinea de ImpulsionRody Montoya VillanuevaAún no hay calificaciones
- Laboratorio 6Documento8 páginasLaboratorio 6Salua zazir Carmona CarrmonaAún no hay calificaciones
- Informe de Cierre - OpenbravoDocumento29 páginasInforme de Cierre - OpenbravoMarco Tulio AstudilloAún no hay calificaciones
- Descripción General La Esquizofrenia Es Un Trastorno Mental Grave Por El Cual Las Personas Interpretan La Realidad de Manera Anormal. La Esquizofrenia Puede Provocar Una Combinación de Alucinaciones, Delirios y (1)Documento7 páginasDescripción General La Esquizofrenia Es Un Trastorno Mental Grave Por El Cual Las Personas Interpretan La Realidad de Manera Anormal. La Esquizofrenia Puede Provocar Una Combinación de Alucinaciones, Delirios y (1)Hiris dayana Gutierrez bautistaAún no hay calificaciones
- Actividad 12 Fundamentos y Administracion de ComprasDocumento3 páginasActividad 12 Fundamentos y Administracion de ComprasAngie GuerreroAún no hay calificaciones
- AcuñaMonroy ElementosdeModeladoDeSistemasDocumento4 páginasAcuñaMonroy ElementosdeModeladoDeSistemasErick GerardoAún no hay calificaciones
- La Lengua Su Estudio y Su EnsenanzaDocumento16 páginasLa Lengua Su Estudio y Su EnsenanzaAlAún no hay calificaciones