También podría gustarte
- Práctica 3Documento19 páginasPráctica 3Isael CamarilloAún no hay calificaciones
- Semana 4 Metales de AporteDocumento67 páginasSemana 4 Metales de AporteYubert Edisson Huanca LimaAún no hay calificaciones
- Practica Fuerzas en EquilibrioDocumento18 páginasPractica Fuerzas en EquilibrioYoxtal Dominguez0% (1)
- Informe de LaboratorioDocumento7 páginasInforme de Laboratorioaleven quispeAún no hay calificaciones
- Eje¡Rcicios de FisicaDocumento3 páginasEje¡Rcicios de Fisicamiguel6monar0% (1)
- Clase 9 - Variables de EstadoDocumento52 páginasClase 9 - Variables de EstadoYubert Edisson Huanca LimaAún no hay calificaciones
- Fuerza Especifica - Unidad 3Documento17 páginasFuerza Especifica - Unidad 3irineo miranda moreno100% (1)
- Hidrostatica e Hidrodinamica. CASTILLODocumento77 páginasHidrostatica e Hidrodinamica. CASTILLORaúl Berrospi RodriguezAún no hay calificaciones
- Reporte de Lab 1 Grupo 3 C21-BDocumento11 páginasReporte de Lab 1 Grupo 3 C21-BAdriel AguirreAún no hay calificaciones
- Mecánica de Sólidos: Laboratorio N°01 Primera Condición de EquilirioDocumento9 páginasMecánica de Sólidos: Laboratorio N°01 Primera Condición de EquiliriomarcoAún no hay calificaciones
- Lab 01Documento9 páginasLab 01Rony Genaro Quispe CoricazaAún no hay calificaciones
- Fisica Equilibrio Lab 1 JaaaaaaaaaDocumento9 páginasFisica Equilibrio Lab 1 JaaaaaaaaaLuis Fernando Portgas D. SolariAún no hay calificaciones
- Lab 01 MS GRUPO 1Documento11 páginasLab 01 MS GRUPO 1jhon bryanAún no hay calificaciones
- LAB03 CBA Mamani Valdez Vilcape GutierrezDocumento11 páginasLAB03 CBA Mamani Valdez Vilcape GutierrezalbieriaqperuAún no hay calificaciones
- Práctica de Laboratorio #01Documento24 páginasPráctica de Laboratorio #01John DiazAún no hay calificaciones
- Laboratorio #02 Primera Condición de Equilibrio-1dddddaaaaDocumento11 páginasLaboratorio #02 Primera Condición de Equilibrio-1dddddaaaaAlexis Laura CcaritaAún no hay calificaciones
- Laboratorio #02 Primera Condición de Equilibrio Grupo 3-1Documento10 páginasLaboratorio #02 Primera Condición de Equilibrio Grupo 3-1Aldo Cesar Cabrera AlccahuamanAún no hay calificaciones
- Laboratorio 1 Mecanica de SolidosDocumento37 páginasLaboratorio 1 Mecanica de SolidosElder Lima GalindoAún no hay calificaciones
- Reporte de Laboratorio 01Documento7 páginasReporte de Laboratorio 01Erikson Reyes Quispe FloresAún no hay calificaciones
- Movimiento Armonico SimpleDocumento8 páginasMovimiento Armonico SimpleRicardo Antonio Carrasco HuancasAún no hay calificaciones
- Lb-01Primera Condición de EquilibrioDocumento8 páginasLb-01Primera Condición de EquilibrioGersson Clemente Montes PachaoAún no hay calificaciones
- Reporte de Laboratorio 01 Grupo 7Documento7 páginasReporte de Laboratorio 01 Grupo 7Jerson SotoAún no hay calificaciones
- Informe Laboratorio N°01 - 3Documento14 páginasInforme Laboratorio N°01 - 3BRENDA ARIANA GARCIA ZUMAETAAún no hay calificaciones
- Experiencia #03 OscilacionesDocumento7 páginasExperiencia #03 OscilacionesJESUS ANGEL CRUZ CAJAAún no hay calificaciones
- Informe de Laboratorio 2-1Documento9 páginasInforme de Laboratorio 2-1ga9649402Aún no hay calificaciones
- Ley de Hooke (Virtual)Documento6 páginasLey de Hooke (Virtual)Daniel Camilo Rivera Castillo0% (1)
- Segundo Lab de Fisica MecanicaDocumento6 páginasSegundo Lab de Fisica MecanicabrayancorreaAún no hay calificaciones
- Reporte de Laboratorio #02Documento8 páginasReporte de Laboratorio #02Josue Fernando Bazan ApazaAún no hay calificaciones
- Lab 04Documento9 páginasLab 04Daniel Andre Omar Gutierrez ChuctayaAún no hay calificaciones
- 1.2. Adición de Vectores (Fuerzas)Documento14 páginas1.2. Adición de Vectores (Fuerzas)Juan Pablo ZabaletaAún no hay calificaciones
- Dinámica LinealDocumento5 páginasDinámica LinealEdomex Volpato OliveyraAún no hay calificaciones
- Vectores Informe N°02: ResumenDocumento10 páginasVectores Informe N°02: ResumenSamuel HerreraAún no hay calificaciones
- Lab 02Documento9 páginasLab 02Moises CasillaAún no hay calificaciones
- Lab 02 Mecanica de SolidosDocumento10 páginasLab 02 Mecanica de SolidosJhon Jhampieer Gil HuamaniAún no hay calificaciones
- Trabajo de Laboratorio Nº2Documento10 páginasTrabajo de Laboratorio Nº2Wilber Eusebio Peralta LlamocaAún no hay calificaciones
- Equilibrio estático primer condiciónDocumento8 páginasEquilibrio estático primer condiciónCristhian Eduardo Terrones MamaniAún no hay calificaciones
- Trabajo Segunda Condicion de Equilibrio Semana 13.Documento8 páginasTrabajo Segunda Condicion de Equilibrio Semana 13.Armandiño AraujoAún no hay calificaciones
- Practica 10. EquilibrioDocumento8 páginasPractica 10. EquilibrioLuysanna FernandezAún no hay calificaciones
- IncompletoDocumento21 páginasIncompletojosue flores mendozaAún no hay calificaciones
- Lab 02Documento15 páginasLab 02cleyber flores sotomayorAún no hay calificaciones
- Valeria Gallego Alvarez - Informe - Medida - Maquina - AtwoodDocumento10 páginasValeria Gallego Alvarez - Informe - Medida - Maquina - Atwoodvaleria gallegoAún no hay calificaciones
- Equilibrio estático de fuerzas concurrentesDocumento22 páginasEquilibrio estático de fuerzas concurrentesStiven Vidal Sucasaca PeredoAún no hay calificaciones
- Informe 1Documento13 páginasInforme 1Denis VasquezAún no hay calificaciones
- Movimiento Armónico SimpleDocumento9 páginasMovimiento Armónico SimpleLorena VivasAún no hay calificaciones
- Orig Equilibri de FuersasDocumento11 páginasOrig Equilibri de FuersasGuido Edwin MH100% (1)
- LF Act 4 Muñoz MolinaDocumento13 páginasLF Act 4 Muñoz MolinaRotciv Con Un Poco De LimónAún no hay calificaciones
- Laboratorio de Fisica-1Documento7 páginasLaboratorio de Fisica-1Luis Mario De León EstradaAún no hay calificaciones
- Segunda condición equilibrioDocumento4 páginasSegunda condición equilibriothony50% (2)
- Coeficientes de fricciónDocumento11 páginasCoeficientes de fricciónNoel EspinozaAún no hay calificaciones
- Vectores Practica NDocumento10 páginasVectores Practica NValentina PetroAún no hay calificaciones
- Lab 14 TeoDocumento9 páginasLab 14 TeoMaycol DonatoAún no hay calificaciones
- Laboratorio 02-Mvi-2Documento6 páginasLaboratorio 02-Mvi-2Dario SánchezAún no hay calificaciones
- Ciencias Básicas Aplicadas: Reporte Laboratorio 01Documento13 páginasCiencias Básicas Aplicadas: Reporte Laboratorio 01Stiven SmithAún no hay calificaciones
- Lab 04 Ondas y CalorDocumento13 páginasLab 04 Ondas y CalorCleyber Eduardo Flores SotomayorAún no hay calificaciones
- TP3 FisicaDocumento9 páginasTP3 FisicaElperroqueevolucionaAún no hay calificaciones
- Ondas y CalorDocumento15 páginasOndas y CalorEnmanuel FloresAún no hay calificaciones
- GUIA 2 Mec Sol 2020-I-VirtualDocumento4 páginasGUIA 2 Mec Sol 2020-I-Virtualkevin159263Aún no hay calificaciones
- Lab 04 - Física IIDocumento5 páginasLab 04 - Física IILuis ArdónAún no hay calificaciones
- Sesión 2 Práctica Datos y gráficas-EEDocumento10 páginasSesión 2 Práctica Datos y gráficas-EEAlfonso Castell PérizAún no hay calificaciones
- Lab 02Documento13 páginasLab 02Tp Victor TodcoAún no hay calificaciones
- Fuerzas de RozamientoDocumento15 páginasFuerzas de RozamientoFABIAN ANDRES RESTREPO FIGUEROAAún no hay calificaciones
- Practica 6Documento9 páginasPractica 6CAROL ESTEFANY XINGU HERNANDEZAún no hay calificaciones
- LISTA DE PIEZAS DE LOS PLANO DE CONEXIONES HIDRAULICO Semana 10Documento7 páginasLISTA DE PIEZAS DE LOS PLANO DE CONEXIONES HIDRAULICO Semana 10Yubert Edisson Huanca LimaAún no hay calificaciones
- Circuito en ParaleloDocumento1 páginaCircuito en ParaleloYubert Edisson Huanca LimaAún no hay calificaciones
- Diapositivas - Semana 10 - Análisis de La Problemática - 2023Documento19 páginasDiapositivas - Semana 10 - Análisis de La Problemática - 2023Yubert Edisson Huanca LimaAún no hay calificaciones
- S11 Dojeda 2023 2Documento75 páginasS11 Dojeda 2023 2Yubert Edisson Huanca LimaAún no hay calificaciones
- MecFluiLaboratorio Lab06Documento1 páginaMecFluiLaboratorio Lab06Yubert Edisson Huanca LimaAún no hay calificaciones
- U09-Descripción Tractor de Cadenas 2023Documento55 páginasU09-Descripción Tractor de Cadenas 2023Yubert Edisson Huanca LimaAún no hay calificaciones
- Glab - S10 - Arivera - 2023 - 02Documento15 páginasGlab - S10 - Arivera - 2023 - 02Yubert Edisson Huanca LimaAún no hay calificaciones
- C21 A INFOGRAFÍA MDS 2023 1-1Documento2 páginasC21 A INFOGRAFÍA MDS 2023 1-1Yubert Edisson Huanca LimaAún no hay calificaciones
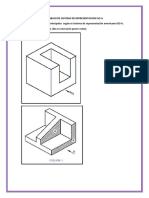
- Trabajo de Proyeccion de Vistas Sist Iso eDocumento2 páginasTrabajo de Proyeccion de Vistas Sist Iso eYubert Edisson Huanca LimaAún no hay calificaciones
- Introducción RULADocumento7 páginasIntroducción RULAYubert Edisson Huanca LimaAún no hay calificaciones
- CPT 5 - Párrafo-Esquema Numérico-2Documento15 páginasCPT 5 - Párrafo-Esquema Numérico-2Yubert Edisson Huanca LimaAún no hay calificaciones
- Actividad en Clase 7Documento3 páginasActividad en Clase 7Yubert Edisson Huanca LimaAún no hay calificaciones
- Clase 14 - Metodos NumericosDocumento30 páginasClase 14 - Metodos NumericosBRUNO ALEXIS ALCANTARA TACORAAún no hay calificaciones
- Caso 6 - JFCHDocumento6 páginasCaso 6 - JFCHJosue Ramirez CastroAún no hay calificaciones
- Evaluación de Entrada - S15 - Aplicaciones Del Cálculo y Estadística - C24 2do A-L - C24 2do B-L-LDocumento5 páginasEvaluación de Entrada - S15 - Aplicaciones Del Cálculo y Estadística - C24 2do A-L - C24 2do B-L-LAngel BrenisAún no hay calificaciones
- Modelo de Informe de LaboratorioDocumento3 páginasModelo de Informe de LaboratorioYubert Edisson Huanca LimaAún no hay calificaciones
- RULA Hoja de CampoDocumento5 páginasRULA Hoja de CampoYubert Edisson Huanca LimaAún no hay calificaciones
- Trabajo de Sistema de Representacion Iso ADocumento5 páginasTrabajo de Sistema de Representacion Iso AYubert Edisson Huanca LimaAún no hay calificaciones
- Glab S08Documento6 páginasGlab S08Yubert Edisson Huanca LimaAún no hay calificaciones
- L4 - Normas ApaDocumento3 páginasL4 - Normas ApaMoisés XhinoAún no hay calificaciones
- Mini Taller Competencias EmocionalesDocumento9 páginasMini Taller Competencias EmocionalesYubert Edisson Huanca LimaAún no hay calificaciones
- Lab 8 - Circuitos AC LV-SIM - Marin Sanchez Rodrigo AnthonyDocumento20 páginasLab 8 - Circuitos AC LV-SIM - Marin Sanchez Rodrigo AnthonyYubert Edisson Huanca LimaAún no hay calificaciones
- UntitledDocumento1 páginaUntitledYubert Edisson Huanca LimaAún no hay calificaciones
- SOLUCIONESDocumento9 páginasSOLUCIONESYubert Edisson Huanca LimaAún no hay calificaciones
- L8 - ENSAYO EXPOSITIVO - Párrafo de Desarrollo (Esquema)Documento2 páginasL8 - ENSAYO EXPOSITIVO - Párrafo de Desarrollo (Esquema)Adriel AguirreAún no hay calificaciones
- Trabajo Alfabeto de Lineas Dibujo TecnicoDocumento3 páginasTrabajo Alfabeto de Lineas Dibujo TecnicoYubert Edisson Huanca LimaAún no hay calificaciones
- TallORI S11 OC 2021 2-1Documento2 páginasTallORI S11 OC 2021 2-1Yubert Edisson Huanca LimaAún no hay calificaciones
- CG-Sem1-Carga Fuerza Campo Electrico PDFDocumento20 páginasCG-Sem1-Carga Fuerza Campo Electrico PDFpierina floresAún no hay calificaciones
- FundicionDocumento19 páginasFundicionSARA JIMENEZ ALVAREZAún no hay calificaciones
- Soluciones Interaccion GravitatoriaDocumento6 páginasSoluciones Interaccion GravitatoriaDiegoAún no hay calificaciones
- 10 Cinémática de CR 2Documento6 páginas10 Cinémática de CR 2Carlos QuispeAún no hay calificaciones
- ENSAYO Movimiento Armonico SimpleDocumento11 páginasENSAYO Movimiento Armonico SimpleDanny ToapantaAún no hay calificaciones
- Trabajo de Campos y FuerzaDocumento25 páginasTrabajo de Campos y FuerzaMario Alvarez MAún no hay calificaciones
- MovSemiparabólicoLab5Documento6 páginasMovSemiparabólicoLab5Juan Pablo Bernal ÑAún no hay calificaciones
- Formulas Cinematic Aydin A MicaDocumento1 páginaFormulas Cinematic Aydin A MicamauroAún no hay calificaciones
- Conceptos y Componentes HidráulicosDocumento14 páginasConceptos y Componentes Hidráulicosjval2Aún no hay calificaciones
- Perfil Morfológico y Velocidad en Atletas de Futsal Con Relación A La Posición en El JuegoDocumento7 páginasPerfil Morfológico y Velocidad en Atletas de Futsal Con Relación A La Posición en El JuegoAlvaro Guevara Jr.Aún no hay calificaciones
- Capitulo 09. Esfuerzos en Una Masa de SuelosDocumento17 páginasCapitulo 09. Esfuerzos en Una Masa de SuelosMig RodríguezAún no hay calificaciones
- Teoría ElectromagnéticaDocumento4 páginasTeoría Electromagnéticadeoli1990Aún no hay calificaciones
- EstequiometriaDocumento2 páginasEstequiometriaRodolfo NietoAún no hay calificaciones
- Método DumasDocumento6 páginasMétodo DumasAndrés EspinozaAún no hay calificaciones
- The Airgun, From de Target at The Trigger ESP.Documento176 páginasThe Airgun, From de Target at The Trigger ESP.Aquiles BaezaAún no hay calificaciones
- Trabajo Potencia EnergiaDocumento22 páginasTrabajo Potencia EnergiaDEIVID ASHCA 2AsAún no hay calificaciones
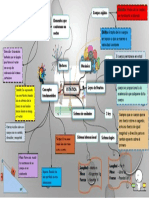
- Mapa Mental Fase 2Documento1 páginaMapa Mental Fase 2Laura Alexandra Medina VelasquezAún no hay calificaciones
- 1er Ensayo Nacional Filadd - Ciencias - Mención Química (v1)Documento46 páginas1er Ensayo Nacional Filadd - Ciencias - Mención Química (v1)Krishna Amara VilchesAún no hay calificaciones
- Balance de Energia.Documento10 páginasBalance de Energia.joshepAún no hay calificaciones
- Último Examen Oral Física 4to AñoDocumento3 páginasÚltimo Examen Oral Física 4to AñoEBGoalkeeperAún no hay calificaciones
- Analisis de Circuito Serie, Paralelo, MixtoDocumento20 páginasAnalisis de Circuito Serie, Paralelo, MixtoMauricio CardonaAún no hay calificaciones
- Balistica ExteriorDocumento18 páginasBalistica ExteriorZacarías R. Maximiliano MorilloAún no hay calificaciones
- Cantidad de Movimiento Lineal PDFDocumento44 páginasCantidad de Movimiento Lineal PDFMariana FernándezAún no hay calificaciones
- Control de Calidad Del Concreto Parte 2Documento8 páginasControl de Calidad Del Concreto Parte 2reundergroundAún no hay calificaciones
- Fisica Jhonny Vivas GarciaDocumento6 páginasFisica Jhonny Vivas GarciaEliud Chirinos ZevallosAún no hay calificaciones