También podría gustarte
- Laboratorio de circuitos electrónicos I: Experimentación básica con diodos y transistores. 2ª ediciónDe EverandLaboratorio de circuitos electrónicos I: Experimentación básica con diodos y transistores. 2ª ediciónCalificación: 4 de 5 estrellas4/5 (4)
- MATRIZ CAP. 2 EMCA FinalDocumento20 páginasMATRIZ CAP. 2 EMCA FinalKatherine VarelaAún no hay calificaciones
- Diseño de Una Trituradora de Plástico para Botellas Pet en La Empresa "Carflex C.A." Ubicada en La Av. 01 Terraza "N", Zona inDocumento18 páginasDiseño de Una Trituradora de Plástico para Botellas Pet en La Empresa "Carflex C.A." Ubicada en La Av. 01 Terraza "N", Zona inOwen Helday Briceño100% (1)
- Maquina Trituradora de Plastico (2) 25Documento38 páginasMaquina Trituradora de Plastico (2) 25Christoffer Briones EstelaAún no hay calificaciones
- INVESTIGACIONES, DISEÑO DE MAQUINASDocumento3 páginasINVESTIGACIONES, DISEÑO DE MAQUINASGewizzarAún no hay calificaciones
- Reporte Final - Extrusora de Filamento para Impresora 3D - CompressedDocumento56 páginasReporte Final - Extrusora de Filamento para Impresora 3D - Compressedalberto.am0104Aún no hay calificaciones
- Proyecto de Licuadora 2Documento48 páginasProyecto de Licuadora 2Jean Paul lopezAún no hay calificaciones
- Evaluación de propiedades mecánicas de HDPE recicladosDocumento199 páginasEvaluación de propiedades mecánicas de HDPE recicladosJefferson AguirreAún no hay calificaciones
- Diseño de una máquina trituradora automática de botellas de plásticoDocumento31 páginasDiseño de una máquina trituradora automática de botellas de plásticoEdison CatotaAún no hay calificaciones
- Informe de Tecnología Del ConcretoDocumento7 páginasInforme de Tecnología Del ConcretoJUAN CARLOS GOMEZ CALVAYAún no hay calificaciones
- Montaje y Puesta en Marcha de La Planta PilotoDocumento8 páginasMontaje y Puesta en Marcha de La Planta PilotoFacundo CarmonaAún no hay calificaciones
- Cap 1 y 2 Trituradora de PETDocumento29 páginasCap 1 y 2 Trituradora de PETChristian RuedaAún no hay calificaciones
- Emca 15-08Documento42 páginasEmca 15-08Marcos ColmanAún no hay calificaciones
- Alexis Jacinto Vergara-González Kevin Christopher Zambrano-PasosDocumento21 páginasAlexis Jacinto Vergara-González Kevin Christopher Zambrano-PasosOrtega Reynolds Gustavo GabrielAún no hay calificaciones
- Marco Teorico 2Documento13 páginasMarco Teorico 2Nikol Lopez ValdezAún no hay calificaciones
- Diseno de Una Trituradora de Recipientes PlasticosDocumento20 páginasDiseno de Una Trituradora de Recipientes PlasticosMauricio HerbasAún no hay calificaciones
- Practica 1 ProtesisDocumento26 páginasPractica 1 Protesisaldo lopezAún no hay calificaciones
- Reporte y Artículo.docxDocumento7 páginasReporte y Artículo.docxBRYAN ALEXANDER ESPINOZA FONSECAAún no hay calificaciones
- Exposicion-final-ANAYA-AMADOR-ECHEVARRIA-GONZALEZ-GUDIÑO-MEC 9-2V2 - CompressedDocumento49 páginasExposicion-final-ANAYA-AMADOR-ECHEVARRIA-GONZALEZ-GUDIÑO-MEC 9-2V2 - Compressedalberto.am0104Aún no hay calificaciones
- Lista de Proyectos 2012-1Documento73 páginasLista de Proyectos 2012-1Hernán SierraAún no hay calificaciones
- Planteamiento de Problema - 2Documento15 páginasPlanteamiento de Problema - 2Yhon Alberth Calizaya PaccoAún no hay calificaciones
- Desarrollo de Una Máquina para Generar Fibra de Plástico A Base de PET RecicladoDocumento8 páginasDesarrollo de Una Máquina para Generar Fibra de Plástico A Base de PET RecicladoMduhaldeAún no hay calificaciones
- Diseño de Una Maquina Extrusora de Filamentos de Tereftalato de PolietilenoDocumento7 páginasDiseño de Una Maquina Extrusora de Filamentos de Tereftalato de PolietilenoAJ Almanza HAún no hay calificaciones
- Proyecto de La Empresa DIVISAN-Taller de InvestigacionDocumento41 páginasProyecto de La Empresa DIVISAN-Taller de InvestigacionCaleb CasasAún no hay calificaciones
- Pedro Jacome Onofre-Jovenes TalentosDocumento6 páginasPedro Jacome Onofre-Jovenes TalentosJacomeOnoAún no hay calificaciones
- Tarea 6 Anaya Amador Echevarria Gonzalez Gudiño Mec 8 2Documento22 páginasTarea 6 Anaya Amador Echevarria Gonzalez Gudiño Mec 8 2alberto.am0104Aún no hay calificaciones
- Diseño y construcción de una aglutinadora de plástico para reciclajeDocumento7 páginasDiseño y construcción de una aglutinadora de plástico para reciclajeandresAún no hay calificaciones
- Materiales de ConstrucciónDocumento4 páginasMateriales de ConstrucciónJhersson TorresAún no hay calificaciones
- Muestra 05 - Revista Con-Ciencia y Tecnica 2022 2-42-46Documento5 páginasMuestra 05 - Revista Con-Ciencia y Tecnica 2022 2-42-46Chuky MolinaAún no hay calificaciones
- Investigacion Unidad 1 Ingenieria Del ProductoDocumento18 páginasInvestigacion Unidad 1 Ingenieria Del Productomiguel macielAún no hay calificaciones
- Formaletas PlásticasDocumento5 páginasFormaletas Plásticaselkin100% (1)
- Trabajo MaquinarteDocumento6 páginasTrabajo MaquinarteStiven MitisAún no hay calificaciones
- Ejemplos de Planteamiento Del Problema Correcto e Incorrecto y de Una Delimitación y Alcance Correcta e Incorrecta (2122-2)Documento4 páginasEjemplos de Planteamiento Del Problema Correcto e Incorrecto y de Una Delimitación y Alcance Correcta e Incorrecta (2122-2)Andrea SisirucaAún no hay calificaciones
- PROPUESTA ANTEPROYECTO DE GRADO - Solarte - Ortega After Javier-17-02-2022Documento25 páginasPROPUESTA ANTEPROYECTO DE GRADO - Solarte - Ortega After Javier-17-02-2022RODRIGO QUIÑONES JAIMEAún no hay calificaciones
- 2668 14213 2 PBDocumento32 páginas2668 14213 2 PBIvan RiAún no hay calificaciones
- A2 - Acrg IntegrarDocumento4 páginasA2 - Acrg IntegrarToramaru UtsunomiyaAún no hay calificaciones
- Anteproyecto Tecnico - Johnny GonzalezDocumento8 páginasAnteproyecto Tecnico - Johnny GonzalezFabiola TeránAún no hay calificaciones
- Plásticos diseñadoresDocumento436 páginasPlásticos diseñadoresAida Lopez MorenoAún no hay calificaciones
- Acitividad Evaluativa Eje 4 Diseño de Producto y ProcesoDocumento12 páginasAcitividad Evaluativa Eje 4 Diseño de Producto y ProcesoJulian D. GalindoAún no hay calificaciones
- Fase 2 - Propuesta-Grupo - 177Documento16 páginasFase 2 - Propuesta-Grupo - 177brayan calderonAún no hay calificaciones
- A1. Transformación Del PET para Maquinados - ITS San Andres TuxtlaDocumento7 páginasA1. Transformación Del PET para Maquinados - ITS San Andres Tuxtlapedro jacomeAún no hay calificaciones
- DISEÑO de Una CompactadoraDocumento7 páginasDISEÑO de Una Compactadorajota2115Aún no hay calificaciones
- Fase 2-Propuesta-Grupo 212027 44Documento21 páginasFase 2-Propuesta-Grupo 212027 44nathalia_06201Aún no hay calificaciones
- Inyeccion de PalsticoDocumento198 páginasInyeccion de PalsticoMarco ArteagaAún no hay calificaciones
- FORMATO para TRABAJOSDocumento47 páginasFORMATO para TRABAJOSo ohAún no hay calificaciones
- Proyecto de Grado Piezoelectricos en Perfil Vial Piloto en BogotáDocumento5 páginasProyecto de Grado Piezoelectricos en Perfil Vial Piloto en BogotáIsabella Calle ArroyaveAún no hay calificaciones
- Ficha Elvin MODIFICADA 2Documento3 páginasFicha Elvin MODIFICADA 2Miguel DíazAún no hay calificaciones
- Diseño de máquina trituradora y seleccionadora de plástico PETDocumento18 páginasDiseño de máquina trituradora y seleccionadora de plástico PETJose Bedoya100% (1)
- Dosificacion: Esta Conformada de Un Sistema de Transporte deDocumento221 páginasDosificacion: Esta Conformada de Un Sistema de Transporte dePepe MujicaAún no hay calificaciones
- MemoriaDocumento42 páginasMemoriaAndrea ReyesAún no hay calificaciones
- Análisis flujo diseño plásticos electrodomésticosDocumento9 páginasAnálisis flujo diseño plásticos electrodomésticosEthiel Morales CAún no hay calificaciones
- Propuesta de Estudio-Eje 4Documento9 páginasPropuesta de Estudio-Eje 4George AstonAún no hay calificaciones
- Informe 1Documento7 páginasInforme 1Guia AcademicoAún no hay calificaciones
- Informe de Proyecto Final PIDDocumento5 páginasInforme de Proyecto Final PIDHERNAN CAMILO MEDINA ESCOBARAún no hay calificaciones
- Perfil de ProyectoDocumento15 páginasPerfil de ProyectoMarco NavarreteAún no hay calificaciones
- Sistema de Control PID para estabilizar una esfera en un balancínDocumento100 páginasSistema de Control PID para estabilizar una esfera en un balancínErik André LigerAún no hay calificaciones
- La Importancia de Una Buena Seleccion de MaterialesDocumento8 páginasLa Importancia de Una Buena Seleccion de MaterialesGenrry Junior Echevarria SanchezAún no hay calificaciones
- La investigación en ingeniería: Análisis y solución de casos desde el aulaDe EverandLa investigación en ingeniería: Análisis y solución de casos desde el aulaCalificación: 4 de 5 estrellas4/5 (2)
- Jaguar PDFDocumento135 páginasJaguar PDFAntonio Corona HernandezAún no hay calificaciones
- Materiales Sostenibles: Principios y guía prácticaDe EverandMateriales Sostenibles: Principios y guía prácticaCalificación: 4.5 de 5 estrellas4.5/5 (7)
- Diseño de Cuchillas TrituradoraDocumento195 páginasDiseño de Cuchillas TrituradoraOrtega Reynolds Gustavo GabrielAún no hay calificaciones
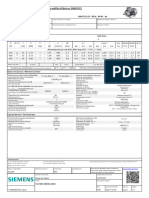
- 1LE1002-0DB32-2AA4 Datasheet Es enDocumento1 página1LE1002-0DB32-2AA4 Datasheet Es enOrtega Reynolds Gustavo GabrielAún no hay calificaciones
- DocsTec 11722 PDFDocumento102 páginasDocsTec 11722 PDFjtelmo1Aún no hay calificaciones
- 5Documento2 páginas5Ortega Reynolds Gustavo GabrielAún no hay calificaciones
- RESUMITO 19 - Flexión EsviadaDocumento14 páginasRESUMITO 19 - Flexión EsviadaNicolás BiolatoAún no hay calificaciones
- Apuntes Master PDFDocumento85 páginasApuntes Master PDFHarol ValenciaAún no hay calificaciones
- Acondicionamiento TermoparDocumento12 páginasAcondicionamiento TermoparManuel Alberto Chavez SalcidoAún no hay calificaciones
- Examen parcial de Dinámica 2020Documento4 páginasExamen parcial de Dinámica 2020Ismael Chambilla C.Aún no hay calificaciones
- QuimicaDocumento38 páginasQuimicaMaría Pía Lupérdiga CavaAún no hay calificaciones
- Teoria de GrafosDocumento16 páginasTeoria de GrafosmarcosAún no hay calificaciones
- Modelos mecanicistas vs empíricos: descripción y ejemplos de su integraciónDocumento2 páginasModelos mecanicistas vs empíricos: descripción y ejemplos de su integraciónMichelAún no hay calificaciones
- 9 Tolerancias de CabeceoDocumento11 páginas9 Tolerancias de Cabeceoarista22Aún no hay calificaciones
- Presión HidrostáticaDocumento3 páginasPresión HidrostáticaMaria DcAún no hay calificaciones
- 4.3 Einstein y La Matematica Geometria - FolletDocumento40 páginas4.3 Einstein y La Matematica Geometria - FolletjesusAún no hay calificaciones
- Unidad 9 Elementos Del MovimientoDocumento13 páginasUnidad 9 Elementos Del MovimientoMolayjacobo DE MolayAún no hay calificaciones
- Mecanica de Suelos Representacion de Horizontes EstratigraficosDocumento18 páginasMecanica de Suelos Representacion de Horizontes EstratigraficosGuillermo Socualaya RivasAún no hay calificaciones
- LP Helvex 115Documento112 páginasLP Helvex 115Javier Gomez LamadridAún no hay calificaciones
- M.R.U.V (S.D)Documento2 páginasM.R.U.V (S.D)Educación EurekaAún no hay calificaciones
- Propiedades sustancias purasDocumento8 páginasPropiedades sustancias purasMarco Deleg VillaAún no hay calificaciones
- Formulario Diseño Engranajes CilíndricosDocumento7 páginasFormulario Diseño Engranajes CilíndricosOscar García fernandezAún no hay calificaciones
- Actividades de ReforzamientoDocumento2 páginasActividades de ReforzamientoSandyCardosoBarretoAún no hay calificaciones
- Casos Especiales en La Aplicación Del Método SimplexDocumento8 páginasCasos Especiales en La Aplicación Del Método SimplexXaiu Cullen BlackAún no hay calificaciones
- MONOGRAFIA - Levantamiento TopograficoDocumento12 páginasMONOGRAFIA - Levantamiento TopograficobookaroniAún no hay calificaciones
- Prueba Saber 1 - DÉCIMODocumento3 páginasPrueba Saber 1 - DÉCIMOValentina SarmientoAún no hay calificaciones
- La LineaDocumento3 páginasLa LineaOscar CedAún no hay calificaciones
- Factorización IIDocumento5 páginasFactorización IIEmerson Omar Fernandez Agurto0% (1)
- Test Final - Unidad 2_ Revisión del intento _ CampusVirtual - Ibero termo 2Documento4 páginasTest Final - Unidad 2_ Revisión del intento _ CampusVirtual - Ibero termo 2miltonduar001Aún no hay calificaciones
- El MaquillajeDocumento185 páginasEl MaquillajeDante Adm100% (1)
- Tercera Ley de La TemodinamicaDocumento5 páginasTercera Ley de La TemodinamicaBryam Molina CerronAún no hay calificaciones
- Guía Ensayo de TensiónDocumento4 páginasGuía Ensayo de TensiónJuan PataquivaAún no hay calificaciones
- Metodo de SarrusDocumento9 páginasMetodo de Sarrusagomez79Aún no hay calificaciones
- Bernes Electricos - WEGDocumento52 páginasBernes Electricos - WEGJuan Andres Diaz FloresAún no hay calificaciones
- Problemas de TurbomaquinasDocumento29 páginasProblemas de TurbomaquinassamuelAún no hay calificaciones